
2.1: Ejemplos de locomoción y manipulación
- Page ID
- 85056

La locomoción incluye conceptos muy diferentes de movimiento que incluyen rodar, caminar, correr, saltar, deslizarse (locomoción ondulatoria), gatear, escalar, nadar y volar. Son drásticamente diferentes en términos de consumo de energía, cinemática, estabilidad y capacidades requeridas por el robot que los implementa. Sin embargo, las definiciones anteriores son sueltas y ambiguas: por ejemplo, “nadar” se puede hacer usando muchas formas diferentes de sistemas de propulsión. De manera similar, un movimiento deslizante en el suelo podría resultar en nadar con solo pocas modificaciones.
La forma en que las partes individuales de un robot pueden moverse unas con respecto a otras y al entorno se llama la cinemática del robot. La cinemática solo se refiere a la posición y velocidad (primera derivada de la posición) de esas partes, pero no a su dinámica, que incluyen la aceleración (segunda derivada de la posición) y el tirón (tercera derivada de la posición).
Comercialmente, la forma de locomoción más dominante es la rodante. Esto se debe a que el balanceo proporciona con mucho la relación energía-velocidad más eficiente (Figura 2.1), haciendo de la invención de la rueda uno de los mayores avances tecnológicos de la historia. En consecuencia, los humanos han modificado su entorno para tener superficies lisas de gran extensión como la red vial, pero también pisos de almacén y residenciales. Por el contrario, la evolución no ha evolucionado ni un solo animal con actuadores tipo rueda.
Consulta
¿Puedes encontrar ejemplos de robots de las categorías anteriores? Identificar los diferentes tipos de actuadores que se utilizan en ellos.
Debido al dominio de los robots rodantes, el motor eléctrico se encuentra entre los actuadores más populares. A excepción del motor paso a paso, que utiliza grandes electroimanes para girar un husillo interno unos pocos grados cada vez, la física del motor eléctrico requiere que gire a velocidades muy altas (múltiples miles de rotaciones por minuto). Por lo tanto, los motores casi siempre se utilizan en conjunto con engranajes para reducir la velocidad y aumentar el par, es decir, la fuerza que el motor puede ejercer para girar un eje. Para poder medir el número de revoluciones y la posición del eje, los motores también suelen combinarse con codificadores rotativos. Los motores que combinan un motor eléctrico con una caja de cambios, codificador y controlador para moverse hacia la posición deseada se conocen como servomotores, y son populares entre los aficionados. Otra clase popular de actuadores, en particular para robots de patas, son los actuadores lineales, que podrían existir en forma eléctrica, neumática o hidráulica. Finalmente, existe una amplia gama de actuadores especiales como Aleaciones con Memoria de Forma, Polímeros Electroactivos o Piezo-elementos, que a menudo permiten una miniaturización extrema, pero no proporcionan atractivas relaciones energía-fuerza y son difíciles de controlar.
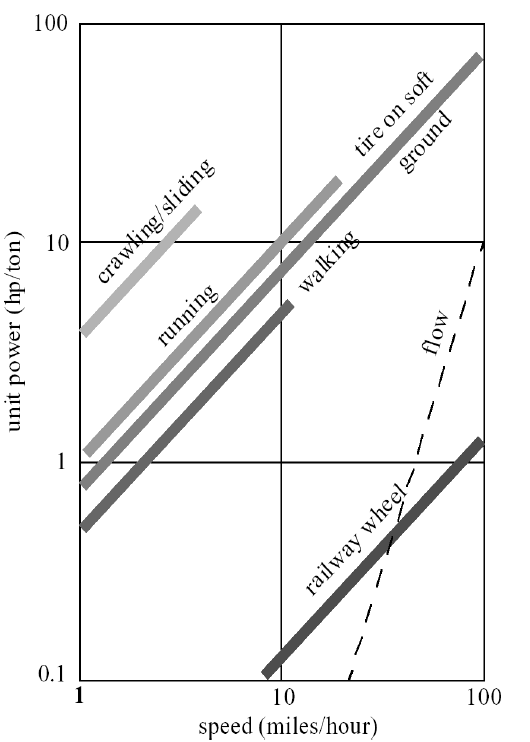
Figura\(PageIndex{1}\): Consumo de energía vs. velocidad para diversos medios de
movimiento loco. De Todd (1985).
La mayoría de los actuadores (y mecanismos) capaces de locomoción también se pueden usar para la manipulación con solo modificaciones menores. La mayoría de los manipuladores industriales consisten en una cadena de actuadores rotativos que están conectados por eslabones. La mayoría de los robots industriales tienen seis o más ejes giratorios independientemente. Veremos por qué más abajo. Los manipuladores industriales modernos tienen la capacidad no solo de controlar la posición de cada una de sus juntas, sino de controlar con precisión el par y la fuerza en cada junta individual, haciendo que el brazo sea arbitrario conforme, que es el inverso de la rigidez en un sentido mecánico. Para una manipulación diestra un robot no solo necesita un brazo, sino también una garra o mano. Atender es un problema duro por sí solo y merece su propio capítulo.