
2.2: Estabilidad estática y dinámica
- Page ID
- 85052

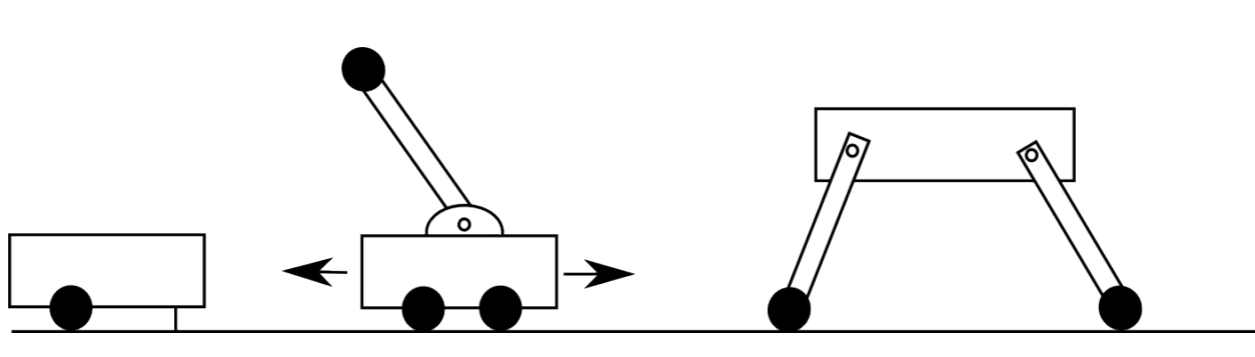
Una diferencia fundamental entre los mecanismos de locomoción es si son estáticamente o dinámicamente estables. Un mecanismo estáticamente estable no caerá incluso cuando todas sus articulaciones se congelen (Figura 2.2.1, izquierda). En cambio, un robot dinámicamente estable requiere un movimiento constante para evitar que se caiga. Técnicamente, la estabilidad requiere que el robot mantenga su centro de masa para que caiga dentro del polígono abarcado por sus puntos de contacto con el suelo. Por ejemplo, los pies de un robot cuadrupal abarcan un rectángulo. Una vez que un robot así levanta uno de sus pies, este rectángulo se convierte en un triángulo. Si la proyección del centro de masa del robot a lo largo de la dirección de gravedad está fuera de este triángulo, el robot caerá. Un robot dinámicamente estable puede superar este problema cambiando su configuración tan rápidamente que se evita una caída. Un ejemplo de un robot puramente dinámicamente estable es un péndulo invertido en un carro (Figura 2.2.1, medio). Tal robot no tiene configuraciones estáticamente estables y necesita mantenerse en movimiento todo el tiempo para mantener el péndulo en posición vertical. Si bien la estabilidad dinámica es deseable para movimientos ágiles y de alta velocidad, los robots deben diseñarse de manera que puedan cambiar fácilmente a una configuración estáticamente estable (Figura 2.2.1, derecha).
Un ejemplo de un robot que tiene configuraciones estáticas y dinámicamente estables es un corredor cuadrupado (“cuatro patas”). A diferencia de caminar, un robot corriendo siempre tendrá dos patas en el aire y alternará entre ellas más rápido de lo que el robot podría caer en cualquier dirección. Aunque es posible caminar estáticamente estable con solo 4 patas, la mayoría de los animales (y robots) requieren 6 patas para caminar estáticamente estable y usan marchas dinámicamente estables (como galopar) cuando tienen cuatro patas. Seis patas permiten al animal mover tres patas a la vez mientras que las otras tres patas mantienen una postura estable.