
10.1: La Teoría del Atrapamiento
- Page ID
- 85058

La teoría del agarre está bastante involucrada, con el estado del arte descrito exhaustivamente en (Rimon & Burdick 2019), pero tiene dificultades para capturar matemáticamente exactamente la mecánica de los mecanismos de agarre que tienen éxito en la práctica. En lugar de describir estos desarrollos aquí —que estarán mucho más allá del alcance de este libro—, describiremos brevemente diferentes enfoques para el agarre de modelos, y sus limitaciones, para proporcionar una mejor comprensión de cuáles son las razones de agarre que funcionan y lo que importa a la hora de diseñar una garra.
En su forma más simple, el agarre requiere inmovilizar un objeto, al menos contra las fuerzas de la gravedad, proporcionando fuerzas apropiadas en sentido contrario, también conocidas como restricciones. Específicamente, se supone que los puntos de contacto en un dedo, pinza o mano robóticos ejercen fuerzas localizadas, restringiendo así suficientemente al objeto. Por esto, los dedos actúan esencialmente como brazos robóticos en miniatura, lo que nos permite aplicar los métodos y herramientas de los capítulos anteriores 2—??
10.1.1. Fricción
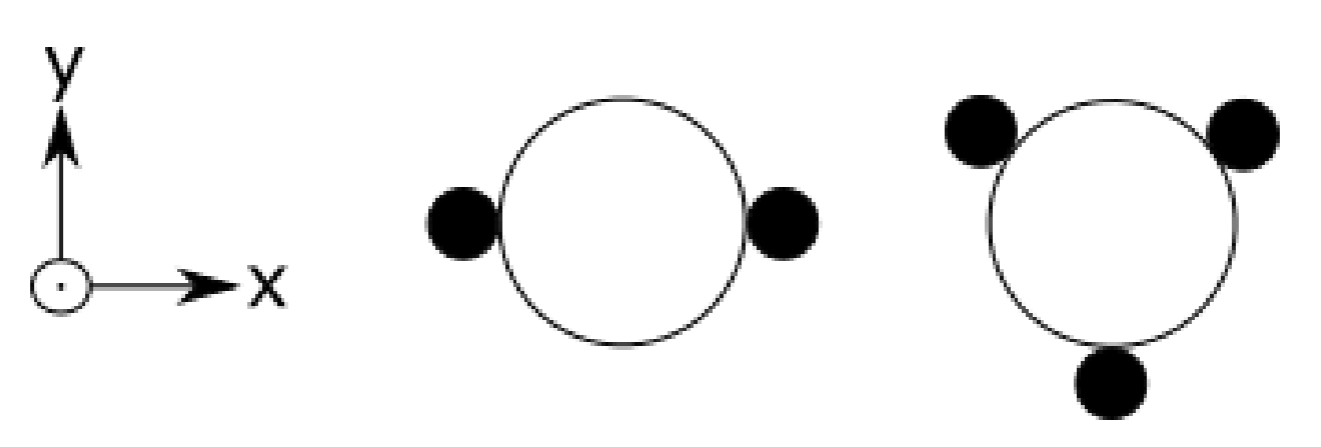
Si bien ya está muy involucrado para cualquier cosa menos mecanismos muy simples, tal modelo solo captura una porción muy pequeña de agarraderas realistas. En cualquier aplicación real, los contactos entre una pinza y la mano no son sin fricción. Esta es la razón por la que un agarre como el que se muestra en la Figura 10.1 realmente funciona. Si realmente no hubiera fricción entre los dedos y el objeto, el objeto sería expulsado de la mano por cada agarre que no esté exactamente alineado con un eje principal del cilindro en la Figura 10.1, izquierda. Además, incluso el agarre de tres dedos que se muestra en la Figura 10.1, derecha, siempre fallaría ya que no hay fuerza que restrinja el objeto desde abajo. Afortunadamente, la existencia de fricción hace que el agarre sea mucho más fácil en la práctica, pero mucho más difícil de describir matemáticamente.
La razón por la que las agarraderas mostradas en la Figura 10.1.1 funcionan en la mayoría de las circunstancias es que las fuerzas normales mostradas tienen un componente tangencial que se debe a la fricción y están cubiertas por la ley de Fricción de Coloumb, que establece que cuanto mayor sea el coeficiente de fricción de un material, más fuerza normal se traduce en fuerzas tangenciales que pueden resistir que dos superficies se muevan una contra la otra:
Se rige por la ecuación:
\[F_{t}\leq \mu F_{n}\]
Aquí F t es la fuerza de fricción ejercida por cada superficie sobre la otra y F n es la fuerza normal. La fuerza Ft actúa en dirección tangencial de la fuerza normal aplicada por, por ejemplo, la punta de un dedo, donde µ es un coeficiente empírico de fricción.
El coeficiente de fricción µ es bajo para vidrio sobre vidrio y alto para caucho en madera. Por lo tanto, nos interesa diseñar pinzas con altos coeficientes de fricción para evitar que los objetos se deslicen.
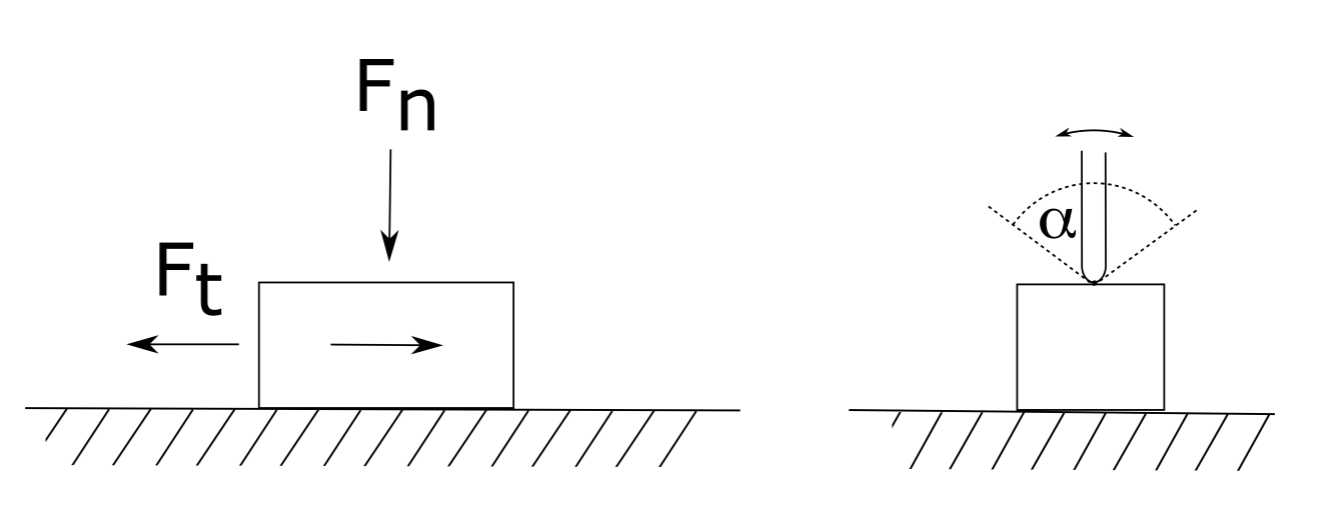
¿Cuándo se deslizan los objetos? Digamos que tenemos la punta del dedo presionando hacia abajo sobre una superficie en cualquier orientación. Habrá una fuerza normal a la superficie F n, que define la fuerza tangencial F t en cualquier dirección. Barriendo la fuerza tangencial alrededor de la fuerza normal crea un cono con un ángulo de apertura de
\[\alpha =2tan^{-1}\mu\]
véase (Rimon & Burdick 2019, p. 57) para una derivación. Si la fuerza neta sobre el objeto no está dentro de este cono, el objeto se desliza. Esto se vuelve más intuitivo al pensar en cómo diferentes valores de µ afectan la forma de este cono. Si µ es alto, el cono será relativamente plano, permitiendo que el objeto acepte fuerzas desde muchas direcciones diferentes sin deslizarse. Si µ es bajo, el cono será relativamente estrecho, requiriendo que la fuerza sea normal a la superficie del objeto para evitar el deslizamiento.
Una fuerza aplicada a un cuerpo rígido ejercerá tanto una fuerza como un par en el centro de gravedad del cuerpo. Esto se llama llave inglesa. Si consideramos todas las fuerzas y pares posibles que podemos aplicar a un cuerpo rígido sin que el efector final se deslice para formar un espacio (es decir, el cono descrito anteriormente para un solo dedo), podemos hablar del espacio de la llave de agarre, que es el espacio correspondiente de todas las llaves adecuadas.
Conocer la relación entre las fuerzas de reacción normales y tangenciales puede ayudar en el diseño de agarradores que tienen más probabilidades de agarrar un objeto con éxito que otros, así como a la hora de planificar un agarre adecuado para objetos con fricción conocida.
10.1.2. Múltiples contactos y deformación
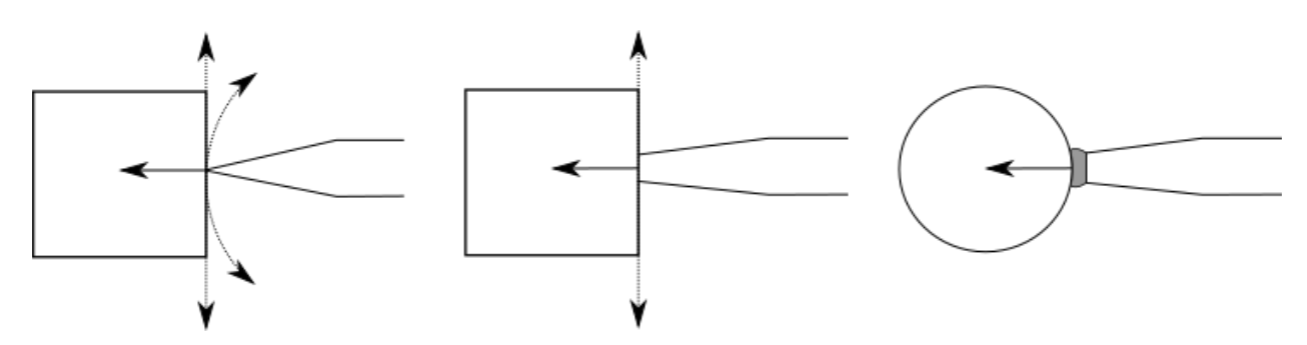
En la práctica, nunca se aplicará ninguna fuerza en un solo punto solamente, sino sobre un área, ya sea por el tamaño de la almohadilla para los dedos en sí o por la deformación del área de contacto. Incluso el área de contacto más pequeña que no sea un punto en el sentido matemático agregará restricciones en el par, agregando restricciones en dimensiones adicionales y, por lo tanto, estabilizando aún más el agarre. Esto se ilustra en la Figura 10.1.3. Mientras que el objeto puede pivotar fácilmente alrededor del punto de contacto en la Figura 10.1.3, a la izquierda, aumentar el área de contacto limita el grado de libertad rotacional. Por lo tanto, es deseable agarrar un objeto con un área de contacto lo más grande posible. Como las superficies no son idealmente planas, en la práctica esto solo es posible cuando el área de contacto es deformable, Figura 10.1.3, derecha. Una gran área de contacto también aumentará la fricción, lo que suele ser deseable.
De hecho, usar mandíbulas o dedos de metal en blanco es poco exitoso en la práctica. En cambio, se utilizan almohadillas de goma para aumentar el cierre de fuerza al conformarse alrededor del objeto. Como el caucho es flexible, sin embargo, el agarre no está fijando completamente el objeto, sino que puede moverse dentro del agarre, lo que podría no ser deseable al levantar una tuerca, por ejemplo, e intentar montarla en un tornillo. Matemáticamente, esto introduce complicaciones adicionales en el modelo de agarre, ya que las almohadillas flexibles son el equivalente a un resorte, aumentando la incertidumbre y la dinámica.
10.1.3. Succión
Un método altamente capaz de agarrar es el uso de succión. Aquí, se presiona una ventosa contra un objeto, utilizando un vacío aplicado por una bomba para aspirar el objeto contra la copa. En lugar de ejercer fuerzas contra el objeto, lo que siempre requiere al menos una fuerza antípoda (o múltiples fuerzas que se distribuyen de manera que el objeto permanezca en equilibrio) para crear una restricción, la succión solo requiere un punto de contacto. El borde de la ventosa proporciona tanto fricción como múltiples puntos de contacto para evitar que el objeto se deslice y restrinja aún más el objeto más allá de la fuerza normal aplicada por el vacío. Exigir solo una sola área de contacto es una tremenda ventaja desde una perspectiva de planeación, ya que solo se necesita identificar un área en un objeto, mientras que otros enfoques de agarre necesitan identificar siempre dos áreas y coordinar el movimiento para alcanzarlas. (La succión usando múltiples ventosas en plataformas hechas a medida para agarrar piezas grandes de automóviles, como puertas, es muy popular en la industria automotriz, pero se basa en trayectorias preprogramadas, lo que no es un foco de este libro).
La naturaleza blanda de la ventosa proporciona la capacidad de que la llanta se adapte al objeto hasta cierto punto, pero hace que la succión sea poco práctica para objetos que no tienen superficies planas u orificios, por ejemplo, objetos almacenados en una red. La elasticidad de la llanta también dificulta la manipulación adicional del objeto, ya que todas las fuerzas aplicadas por el robot deberán transferirse a través de un material elástico similar a un resorte. Finalmente, la succión requiere de una bomba de vacío que sea capaz de generar la fuerza suficiente para levantar un objeto, limitando el peso máximo de los objetos adecuados para la succión por una sola ventosa en la práctica.