
10.2: Mecanismos Sencillos de Agarre
- Page ID
- 85057

Comprender por qué el agarre realmente funciona, es decir, debido a la fricción y al aumento del área de contacto debido a la deformación, nos permite seleccionar mecanismos de agarre que son capaces de agarrar con éxito una amplia gama de objetos, simples de construir y fáciles de controlar. Aquí, las propiedades de interés son el rango de posibles tamaños de objeto, dado por un tamaño mínimo y máximo, el peso máximo de un objeto y cuán frágiles pueden ser los objetos. Aquí, las dimensiones del objeto dependen directamente de la cinemática de la garra, como la apertura mínima y máxima, mientras que el peso máximo viene dado por el par que el mecanismo puede ejercer, así como el número de contactos y sus parámetros de fricción. Si una garra puede manejar objetos frágiles, es una función de qué tan bien se puede medir y controlar este par.
10.2.1. Pinza tipo tijera 1-DoF
Una de las garras más simples es una garra simple de un grado de libertad, que es un diseño popular en la comunidad protésica, y ha sido refinada durante siglos. Accionado por una cuerda montada en el hombro de una persona, o más recientemente por motores eléctricos controlados mediante la medición de la actividad muscular en la parte inferior del brazo, este sencillo mecanismo permite a sus usuarios realizar una amplia gama de actividades cotidianas. De hecho, se ha demostrado que una mano protésica lista para usar realiza una gran variedad de tareas de agarre y manipulación en comparación con otras manos robóticas en un escenariador de tele-operación, solo limitada por su capacidad para ajustarse a restricciones cinemáticas específicas, como operar tijeras (Patel, Segil y Correll 2016).
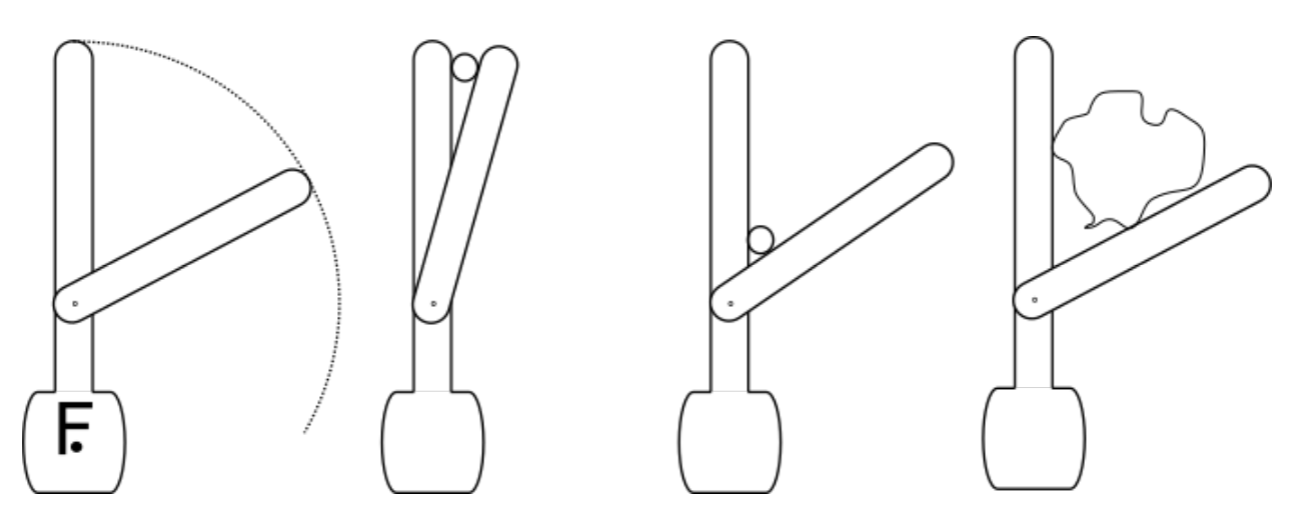
Un diseño sencillo se muestra en la Figura 10.2.1 y consiste en un dedo activo que presiona un objeto contra un dedo pasivo, con ambos dedos a menudo en forma de gancho. Como ya debería quedar claro, tal diseño sólo puede funcionar confiando en la fricción, lo que hace que no sea muy común en la robótica tradicional.
La ventaja clave de este mecanismo es la estrategia de control muy simple que permite: usar el dedo pasivo para hacer contacto con el objeto, luego usar el dedo activo para cerrar el agarre. El evento “hacer contacto” puede detectarse midiendo la fuerza en la muñeca y buscando cambios bruscos o usando un sensor táctil en la superficie con la que se realiza el contacto. Por lo tanto, este enfoque puede conducir a agallas robustas con un mínimo de detección. Una desventaja de este mecanismo es que su función se basa exclusivamente en la fricción, posiblemente expulsando objetos de su agarre si la fricción no es suficiente o el objeto está en una conformación por lo demás subóptima. A diferencia de la mayoría de los otros mecanismos, también es imposible utilizar la posición del dedo para inferir el ancho de un objeto, lo cual se ilustra por las ilustraciones de la Figura 10.2.1, centro.
El mecanismo mostrado en la Figura 10.2.1 se puede accionar de muchas maneras diferentes, por ejemplo, mediante la fijación de un servomotor directamente al dedo activo, utilizando un alambre de aleación con memoria de forma a través de un brazo de palanca adecuado, o un pistón o globo neumático.
10.2.2. Mandíbula paralela
El mecanismo industrial más común es la mordaza paralela de dos dedos. Opera apretando un objeto entre sus dos mandíbulas paralelas, las cuales suelen ser accionadas por un solo actuador y por lo tanto se mueven en concierto. Las mordazas paralelas generalmente producen más área de contacto que una garra 1-DoF similar a una tijera, pero sufren de un rango de movimiento más pequeño.
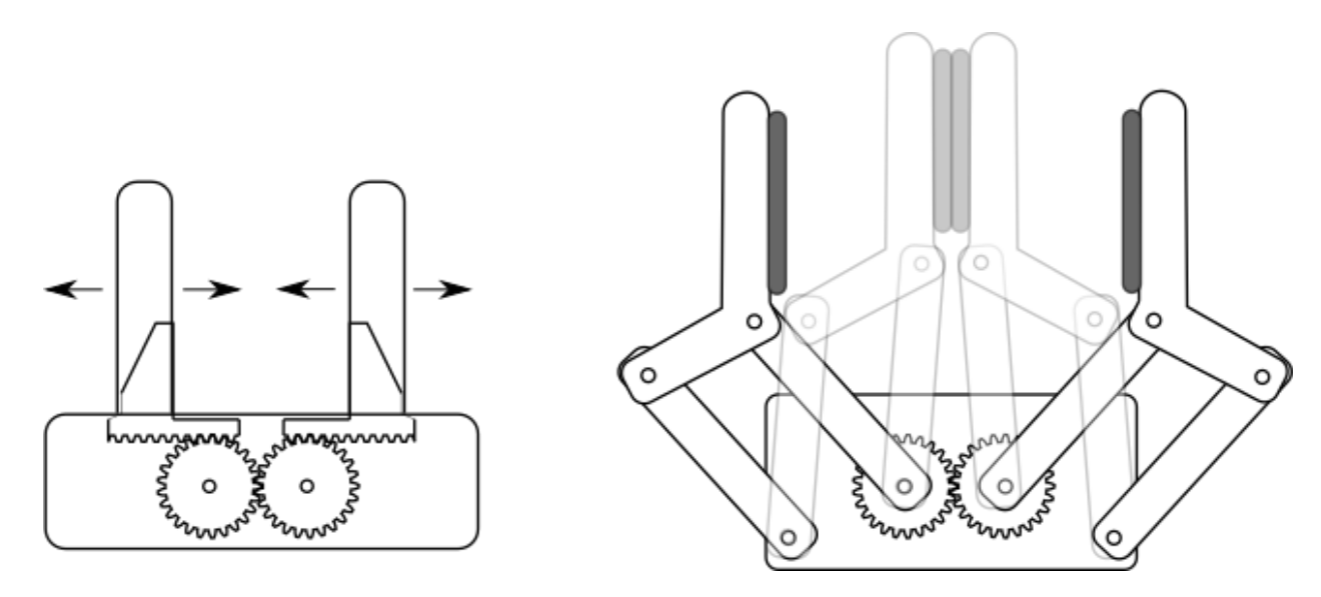
La Figura 10.2.2, izquierda, muestra una implementación minimalista de una mordaza paralela que puede ser accionada por un solo servomotor, accionando dos engranajes de cremallera en los que están montadas las mordazas de la garra. Si bien el uso de engranajes en bastidores es inusual en un diseño industrial, las mandíbulas de las mordazas generalmente viajan en roscas accionadas por engranajes sinfín o están unidas a un pistón neumático, este dibujo ilustra la relación entre el rango de movimiento de las mordazas de la garra, la longitud del mecanismo sobre el que se desliza, aquí un engranaje de cremallera, y el tamaño del cuerpo resultante. Para que este diseño se cierre completamente, los dos engranajes de cremallera deben montarse en un desplazamiento para deslizarse uno contra el otro. Restricciones como esta a menudo hacen que el cuerpo de la garra sea dos veces más ancho que la apertura máxima, lo que dificulta que el robot ingrese a áreas estrechas. El diseño mecánico también afecta la velocidad a la que puede operar una garra. Pinzas neumáticas, donde la presión de aire que entra en cualquiera de los extremos del pistón puede llevar la mordaza a una posición “abierta” o “cerrada” muy rápidamente (2-3 veces por segundo), pero no se puede controlar con precisión. En cambio, los mecanismos eléctricos intercambian precisión y par con la velocidad.
La estrategia de control para las mordazas paralelas requiere una estimación precisa de la pose del objeto de interés y la colocación de la garra de manera que el objeto esté justo en el centro de las dos mandíbulas. Tenga en cuenta que el cierre forzado con un objeto estático, como un tornillo montado en una estructura, requiere que ambas mordazas hagan contacto con el objeto al mismo tiempo, imponiendo así requisitos de alta precisión tanto para la detección de objetos como para el movimiento del robot. Aquí, el cumplimiento puede ayudar, permitiendo que la garra ajuste su pose al objeto. Esto se puede lograr midiendo las fuerzas en la muñeca y moviendo la mordaza para minimizar las fuerzas laterales o un mecanismo o estructura de montaje compatible, tal como un robot equipado con actuadores neumáticos o elásticos en serie. Un enfoque alternativo es accionar ambas mordazas de agarre de forma independiente.
10.2.3. Pinza paralela con varillaje de 4 barras
Un mecanismo de mandíbula paralela con un mayor rango de movimiento se puede lograr usando dos enlaces de 4 barras, Figura 10.2.2, derecha. En un varillaje de 4 barras, la rotación se traduce en traslación recta. Esto se logra mediante dos pares de barras paralelas de igual longitud. En la Figura 10.2.2, derecha, una de las cuatro barras no se mueve y se sustituye por el cuerpo de la garra, en el que se montan dos de las barras. Curiosamente, ambos pares permanecen paralelos ya que una de las barras gira, lo que da como resultado que las dos mordazas de agarre permanezcan paralelas entre sí. Esto se entiende mejor inspeccionando la Figura 10.2.2 y comparando las dos posiciones en las que puede estar la mandíbula izquierda.
El inconveniente de este diseño es que cerrar la garra también resulta en un movimiento hacia adelante. Esto requiere acercarse a un objeto desde diferentes alturas, dependiendo de su anchura. Aparte de esto, la estrategia de control es la misma que para la mordaza paralela, requiriendo una estimación precisa de la pose del objeto. También aquí, agregar cumplimiento o accionamiento independiente de cada mandíbula puede ayudar a resolver problemas de precisión.
10.2.4. Manos Multi-Dedos
Las mordazas con más de dos dedos/mandíbulas rara vez se utilizan en la práctica industrial. Un caso de uso común es agarrar objetos cilíndricos desde arriba, para lo cual las manos de tres dedos, como se indica en la Figura 10.1.1, derecha, son las más adecuadas. En la mayoría de los demás casos, tres dedos no son una ventaja, e incluso podrían ser un obstáculo, sin embargo. Por ejemplo, es difícil realizar agallas simples de pellizco con tres dedos. Esto ha llevado a diseños en los que dos de los dedos son reconfigurables desde realizar un movimiento hacia adentro para comportarse de manera idéntica a una mordaza paralela, mientras que el tercer dedo se almacena en una posición segura. Además de la complejidad mecánica, tal enfoque requiere también pasos adicionales de planeación.
La cantidad de agallas posibles y la cantidad de agallas posibles que se necesitan para captar cada objeto posible sigue siendo un problema teórico difícil (que se complica aún más por el hecho de que el agarre exitoso a menudo ocurre en el límite de lo que es matemáticamente manejable). Generalmente, podemos decir sin embargo, que los dedos adicionales —como en la mano humana— proporcionan redundancia adicional, lo que permite agarrar y manipular (ver Sección 10.4) el mismo objeto de muchas maneras diferentes, incluida la manipulación del objeto dentro de la mano, es decir, sin colocación o entrega intermettent a otra garra.