
1.4: Cinemática de la Teoría del Haz Elemental
- Page ID
- 85205

La palabra “cinemática” se deriva de la palabra griega “kinema”, que significa movimientos, movimiento. Cualquier movimiento de un cuerpo implica desplazamientos\(u_i\), sus incrementos\(du_i\) y velocidades\(\dot{u}_i\). Si se excluyen las traslaciones y rotaciones del cuerpo rígido, se desarrollan deformaciones. A menudo decimos “suposición cinemática” o “condiciones de límite cinemático” o “cantidades cinemáticas” etc. Todo ello significa que se hacen declaraciones sobre los desplazamientos y cepas y/o sus tasas. Por el contrario, la palabra “estática” se reserva para describir tensiones y/o fuerzas, aunque un cuerpo pueda moverse. El punto es que para estructuras determinadas estáticamente, se podrían determinar tensiones y fuerzas sin invocar movimiento. Expresiones como “formulación estática”, “condiciones de límite estático”, “cantidades estáticas” siempre se refieren a tensiones y fuerzas.
Primaria es otra palabra en el título de esta sección que requiere explicación. Una viga es una estructura esbelta que puede comprimirse, extenderse o doblarse. La viga debe estar sujeta a una carga transversal (perpendicular a su eje). De lo contrario se convierte en otra cosa, como se explica en la Figura (\(\PageIndex{1}\)).
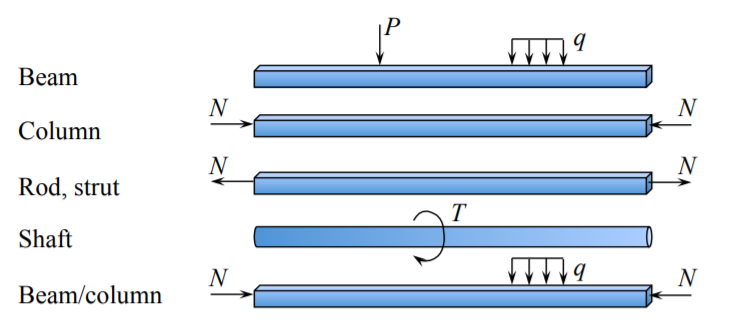
Todas las estructuras anteriores pueden tener una esbeltez similar. Qué esbelta debe ser la estructura para convertirse en una viga. La esbeltez se define como una relación longitud/espesor\(\frac{l}{h}\). Si\(\frac{l}{h} > 20\), el haz obedece a los supuestos cinemáticos simplificados y se le llama “haz de Euler”. Vigas mucho más cortas con\(\frac{l}{h} < 10\) desarrollar tensiones de corte considerables además de tensiones de flexión y deben ser tratadas por un conjunto diferente de suposiciones. Tales vigas se denominan vigas de Timoshenko. El rango intermedio\(10 < \frac{l}{h} < 20\) es un área gris donde los supuestos simplificadores de la teoría del haz elemental pierden gradualmente validez.
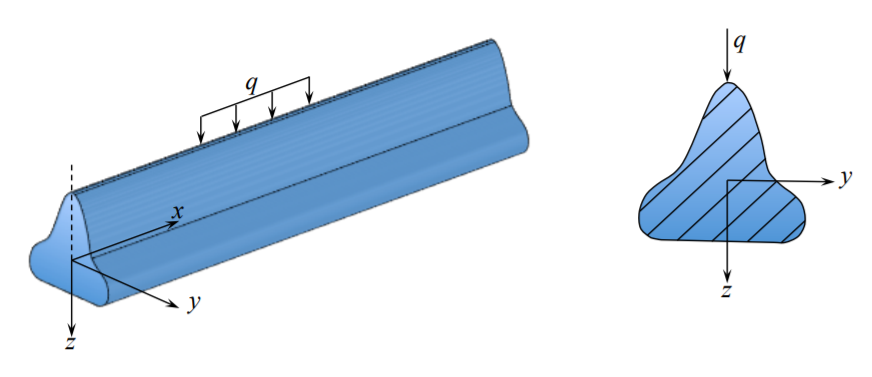
Esta sección trata de vigas de sección sólida, a diferencia de las secciones de paredes delgadas. En las presentes notas de conferencia, se utiliza consistentemente el sistema\((x, y, z)\) de coordenadas rectangulares para diestros. El eje x se dirige a lo largo de la longitud de la viga con un origen en una ubicación conveniente, generalmente el extremo del centro de la viga. El eje y está en la dirección de la anchura con su origen en el plano de simetría de la sección transversal, Figura (\(\PageIndex{2}\)). Finalmente, el eje z está apuntando hacia abajo y se mide desde el eje centroidal de la sección transversal (véase la recitación 2 para la definición de eje centroidal).
En mecánica estructural los componentes del vector de desplazamiento en\(x\),\(y\), y\(z\) direcciones se denotan respectivamente por\((u, v, w)\). El desarrollo de la teoría de haces elementales se basa en tres supuestos cinemáticos. Posteriormente se introducirán suposiciones adicionales sobre el estado de estrés.