
3.3: Rueda de reacción
- Page ID
- 84698

Las ruedas de reacción se utilizan para el control de actitud de las naves espaciales. El componente principal de una rueda de reacción es un rotor, la “rueda”, que normalmente no está girando o girando a una velocidad de rotación constante diferente de cero. Cuando un motor aumenta o disminuye la velocidad de rotación desde el valor normal, se impone un momento de control sobre el vehículo al que está unida la rueda de reacción.
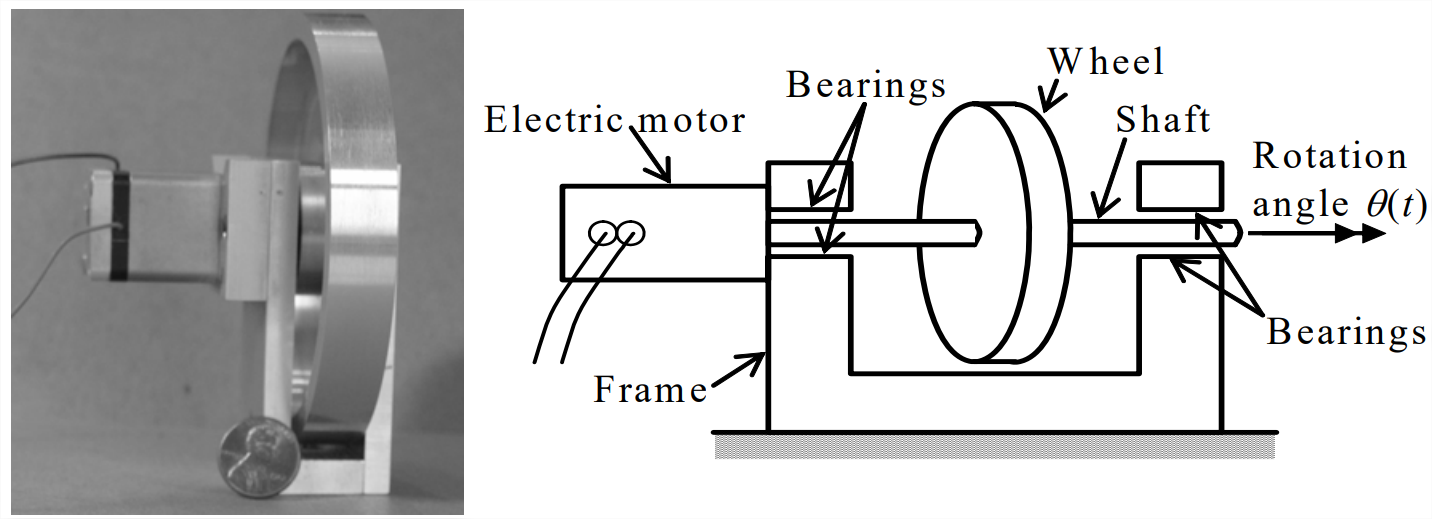
El conjunto de rueda de reacción dibujado en la Figura\(\PageIndex{1}\) es un pequeño dispositivo de laboratorio utilizado en la investigación experimental. Su funcionamiento básico es el mismo que el de un conjunto de rueda de reacción calificado para vuelo. Los miembros giratorios son la rueda, el eje y el rotor del motor. Denotamos su inercia rotacional combinada alrededor del eje del eje como\(J\), también llamado momento de inercia. El eje se sostiene en cojinetes, los cuales están lubricados, pero sin embargo imponen un momento de arrastre. Se denota el ángulo de rotación de los miembros giratorios\(\theta(t)\), y se representa gráficamente en la Figura\(\PageIndex{1}\) por una flecha de doble punta y la regla de la derecha que da la polaridad de rotación. Se denota la velocidad de rotación (velocidad angular, velocidad de giro)\(\dot{\theta}(t) \equiv p(t)\), un símbolo comúnmente utilizado para la velocidad angular en aplicaciones aeronáuticas.
Idealizaremos el momento de arrastre como teniendo la forma viscosa lineal\(c_{\theta} \times p(t)\), donde\(c_{\theta}\) está la constante de amortiguación viscosa rotacional, que se puede medir en hardware real. Además, denotaremos como\(M_{m}(t)\) el par impuesto a los miembros giratorios por el motor eléctrico, siendo este par una cantidad de entrada independiente.
El dibujo a continuación es el diagrama de cuerpo libre (FBD) de todos los momentos (pares de torsión en este caso) que actúan sobre los miembros giratorios, con el arrastre del rodamiento mostrado como un solo par, aunque en realidad se distribuya sobre todas las superficies del rodamiento:
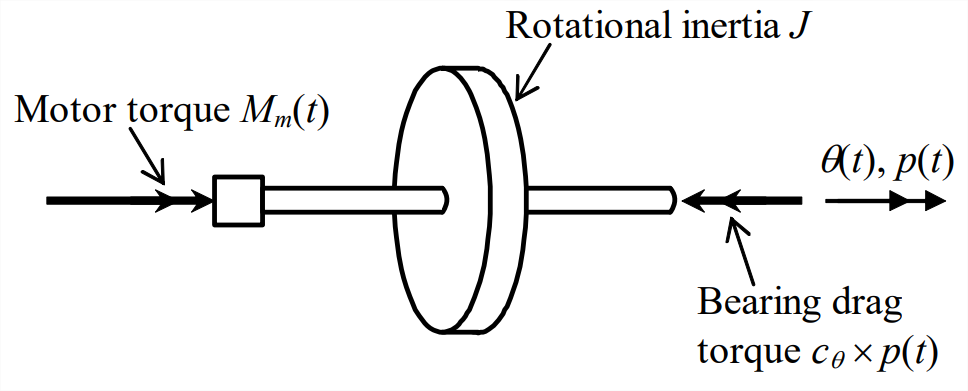
Para derivar la ecuación de movimiento, escribimos la 2ª ley de Newton para la rotación alrededor del eje del eje, basada en el FBD:
\[\Sigma(\text { Moments })_{\text {about shaff axis }}=(\text { rotational inertia }) \times(\text { rotational acceleration })_{\text {about shaft axis }} \nonumber \]
La conversión de la ecuación\(\ref{eqn:3.1}\) en la forma estándar de primer orden da