
9.7: Conciliación de Modelos
- Page ID
- 85536

Hemos determinado que podemos predecir sus características de potencia y/o par de torsión desde dos puntos de vista: primero, conociendo las corrientes en el rotor y el estator podríamos derivar una expresión para par vs. un ángulo de potencia:
\(\ T=-\frac{3}{2} p M I I_{f} \sin \delta_{i}\)
Desde el punto de vista del circuito, es posible derivar una expresión para el poder:
\(\ P=-\frac{3}{2} \frac{V E_{a f}}{X_{d}} \sin \delta\)
y por supuesto dado que la potencia es par por velocidad, esto implica que:
\(\ T=-\frac{3}{2} \frac{V E_{a f}}{\Omega X_{d}} \sin \delta=-\frac{3}{2} \frac{p V E_{a f}}{\omega X_{d}} \sin \delta\)
En esta sección de las notas vamos a, en primer lugar, conciliar estas nociones, mirar un poco más a lo que significan, y luego generalizar nuestra teoría simple a las máquinas de polos salientes como una introducción a la teoría de dos ejes de las máquinas eléctricas.
Ángulos de par:
La Figura 5 muestra un diagrama vectorial que muestra el funcionamiento de un motor síncrono. Representa los MMF y los flujos del rotor y estator en sus respectivas posiciones en el espacio durante el funcionamiento normal. El flujo terminal se elige para ser 'real', u ocupar la posición horizontal. En el funcionamiento del motor el rotor se retarda por ángulo\(\ \delta\), por lo que el flujo del rotor\(\ M I_{f}\) se muestra en esa posición. También se muestra la corriente del estator, y también se muestra el ángulo de par entre éste y el rotor.\(\ \delta_{i}\) Ahora, tenga en cuenta que la línea punteada OA, dibujada perpendicular a una línea trazada entre el flujo del estator\(\ L_{d} I\) y el flujo terminal\(\ \Lambda_{t}\), tiene longitud:
\(\ |O A|=L_{d} I \sin \delta_{i}=\Lambda_{t} \sin \delta\)
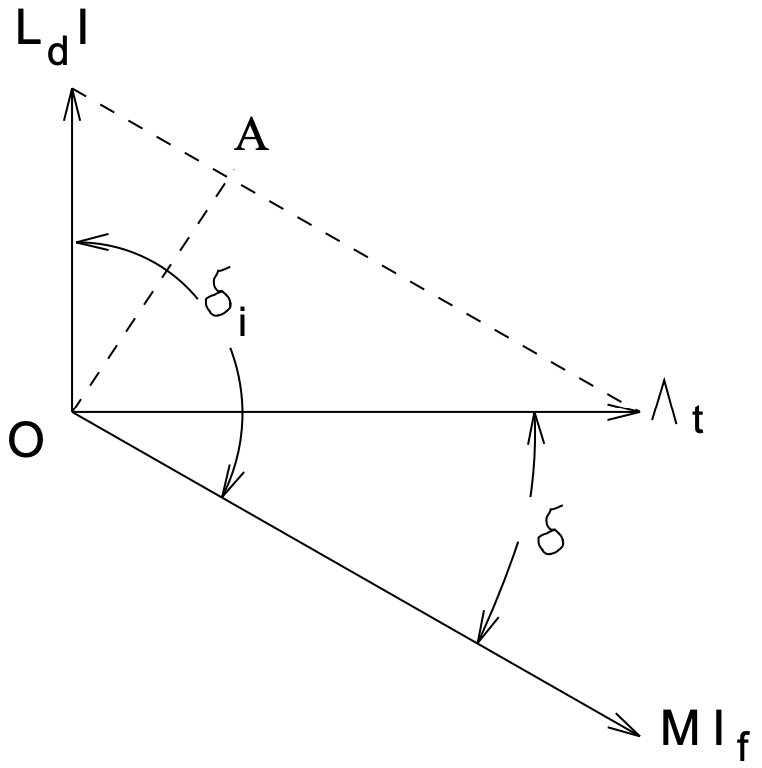 Figura 5: Adición de fasores de máquina síncrona
Figura 5: Adición de fasores de máquina síncronaLuego, señalando que el voltaje del terminal\(\ V=\omega \Lambda_{t}\),\(\ E_{a}=\omega M I_{f}\) y\(\ X_{d}=\omega L_{d}\), la sustitución directa produce:
\(\ \frac{3}{2} \frac{p V E_{a f}}{\omega X_{d}} \sin \delta=\frac{3}{2} p M I I_{f} \sin \delta_{i}\)
Por lo tanto, las imágenes basadas en corriente y voltaje dan el mismo resultado para el par.