
2.3: Torsión inducida por un campo magnético
- Page ID
- 83747

Un campo magnético ejerce una fuerza sobre la corriente. Esta fuerza se ejerce en una dirección perpendicular a la dirección del flujo de corriente. Por esta razón, las estructuras portadoras de corriente en un campo magnético tienden a girar. Una descripción conveniente de la fuerza asociada con el movimiento de rotación es el torque. En esta sección, definimos el par y aplicamos este concepto a un bucle cerrado de corriente. Estos conceptos se aplican a una amplia gama de dispositivos prácticos, incluidos los motores eléctricos.
La figura\(\PageIndex{1}\) ilustra el concepto de par.
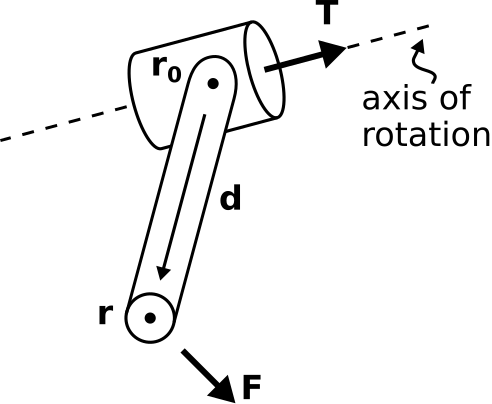
El par depende de lo siguiente:
- Un origen local\({\bf r}_0\),
- Un punto\(\bf{r}\) que está conectado\({\bf r}_0\) por una estructura mecánica perfectamente rígida, y
- La fuerza\({\bf F}\) aplicada en\({\bf r}\).
En términos de estos parámetros, el par\({\bf T}\) es:
\[{\bf T} \triangleq {\bf d} \times {\bf F} \nonumber \]
donde el brazo de palanca\({\bf d} \triangleq {\bf r} - {\bf r}_0\) da la ubicación de\({\bf r}\) relativo a\({\bf r}_0\). Tenga en cuenta que\({\bf T}\) es un vector libre de posición que apunta en una dirección perpendicular a ambos\({\bf d}\) y\({\bf F}\).
Tenga en cuenta que\({\bf T}\) no apunta en el sentido de rotación. Sin embargo,\({\bf T}\) indica el sentido de rotación a través de una “regla de la mano derecha”: Si apuntas el pulgar de tu mano derecha en la dirección de\({\bf T}\), entonces los dedos rizados de tu mano derecha apuntarán en la dirección de la rotación inducida por el par.
Si la rotación realmente ocurre depende de la geometría de la estructura. Por ejemplo, si\({\bf T}\) se alinea con el eje de un eje mecánico perfectamente rígido, entonces todo el trabajo realizado por se\({\bf F}\) aplicará a la rotación del eje sobre este eje. De lo contrario, el par tenderá a girar el eje en otras direcciones también. Si el eje no está libre para girar en estas otras direcciones, entonces se reduce el par efectivo, es decir, el par que contribuye a la rotación del eje.
La magnitud de\({\bf T}\) tiene unidades base SI de N\(\cdot\) m y cuantifica la energía asociada a la fuerza rotacional. Como era de esperar, la magnitud del par aumenta al aumentar la magnitud del brazo de palanca\(\left|{\bf d}\right|\). En otras palabras, el par resultante de una fuerza aplicada constante aumenta con la longitud del brazo de palanca.
El par, al igual que la fuerza de traslación\(\bf{F}\), satisface la superposición. Es decir, el par resultante de las fuerzas aplicadas a múltiples brazos de palanca rígidamente conectados es la suma de los pares aplicados a los brazos de palanca individualmente.
Ahora considere el bucle de corriente que se muestra en la Figura\(\PageIndex{2}\). El bucle es perfectamente rígido y está unido rígidamente a un eje no conductor. El conjunto que consiste en el bucle y el eje puede girar sin fricción alrededor del eje del eje. El bucle consta de cuatro segmentos rectos que son perfectamente conductores e infinitesimalmente delgados. \({\bf B}_0 = \hat{\bf x} B_0\)Existe una densidad de flujo magnético impresionado espacialmente uniforme y estático en todo el dominio del problema. (Recordemos que un campo impresionado es aquel que existe en ausencia de cualquier otra estructura en el problema.) ¿Qué moción, si la hay, se espera?
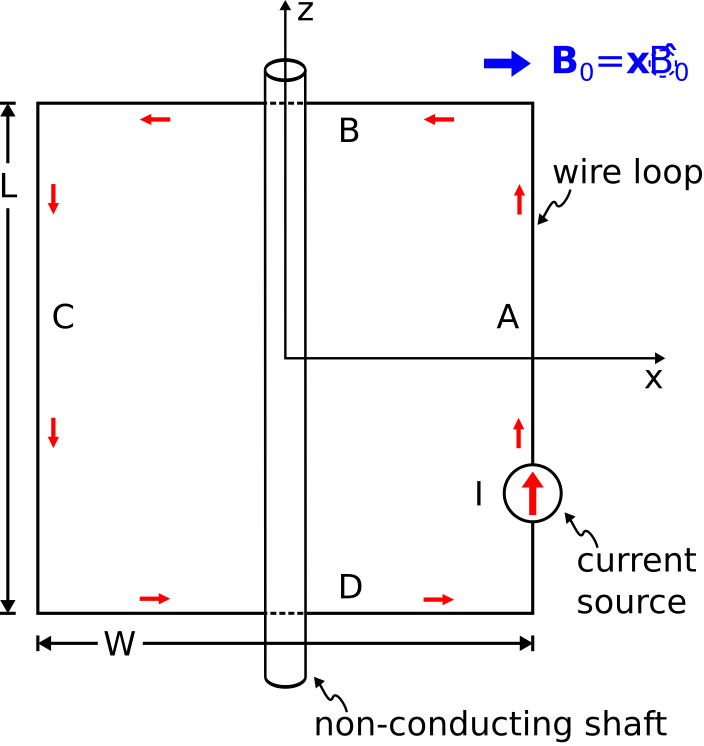
Recordemos que la fuerza traslacional neta en un bucle de corriente en un campo magnético estático y espacialmente uniforme es cero (Sección 2.2). Sin embargo, esto no excluye la posibilidad de que diferentes fuerzas de traslación actúen sobre cada uno de los segmentos de bucle dando como resultado una rotación del eje. Primero calculemos estas fuerzas. La fuerza\({\bf F}_A\) en el segmento A es
\[{\bf F}_A = I{\bf l}_A \times {\bf B}_0 \nonumber \]
donde\({\bf l}_A\) es un vector cuya magnitud es igual a la longitud del segmento y que apunta en la dirección de la corriente. Por lo tanto,
\[\begin{align} {\bf F}_A &= I\left(\hat{\bf z}L\right) \times \left( \hat{\bf x}B_0 \right) \nonumber \\ &= \hat{\bf y}ILB_0\end{align} \nonumber \]
Del mismo modo, la fuerza\({\bf F}_C\) sobre el segmento C es
\[\begin{align} {\bf F}_C &= I\left(-\hat{\bf z}L\right) \times \left( \hat{\bf x}B_0 \right) \nonumber \\ &= -\hat{\bf y}ILB_0\end{align} \nonumber \]
Las fuerzas\({\bf F}_B\) y\({\bf F}_D\) sobre los segmentos B y D, respectivamente, son:
\[{\bf F}_B = I\left(-\hat{\bf x}L\right) \times \left( \hat{\bf x}B_0 \right) = 0 \nonumber \]
y
\[{\bf F}_D = I\left(+\hat{\bf x}L\right) \times \left( \hat{\bf x}B_0 \right) = 0 \nonumber \]
Así, la fuerza ejercida sobre el bucle de corriente por el campo magnético impresionado conducirá a la rotación en la\(+\hat{\bf \phi}\) dirección.
Calculamos el par asociado\({\bf T}\) como
\[{\bf T} = {\bf T}_A + {\bf T}_B + {\bf T}_C + {\bf T}_D \nonumber \]
donde\({\bf T}_A\),\({\bf T}_B\)\({\bf T}_C\), y\({\bf T}_D\) son los pares asociados con los segmentos A, B, C y D, respectivamente. Por ejemplo, el par asociado con el segmento A es
\[\begin{align} {\bf T}_A &= \frac{W}{2}\hat{\bf x} \times {\bf F}_A \nonumber \\ &= \hat{\bf z}L\frac{W}{2}IB_0 \end{align} \nonumber \]
Del mismo modo,
\[{\bf T}_B = 0 ~\mbox{since ${\bf F}_B=0$} \nonumber \]
\[{\bf T}_C = \hat{\bf z}L\frac{W}{2}IB_0 \nonumber \]
\[{\bf T}_D = 0 ~\mbox{since ${\bf F}_D=0$} \nonumber \]
Sumando estas contribuciones, encontramos
\[{\bf T} = \hat{\bf z}LWIB_0 \nonumber \]
Obsérvese que\({\bf T}\) apunta en la\(+\hat{\bf z}\) dirección, indicando la fuerza rotacional ejercida en la\(+\hat{\bf \phi}\) dirección, como se esperaba. También tenga en cuenta que el par es proporcional al área\(LW\) del bucle, es proporcional a la corriente\(I\), y es proporcional a la magnitud del campo magnético\(B_0\).
El análisis que acabamos de completar fue estático; es decir, solo se aplica en el instante representado en la Figura\(\PageIndex{2}\). Si se permite que el eje gire sin fricción, entonces el bucle girará en la\(+\hat{\bf \phi}\) dirección. Entonces, ¿qué pasará con las fuerzas y el torque? Primero, tenga en cuenta que\({\bf F}_A\) y siempre\({\bf F}_C\) están en las\(-\hat{\bf y}\) direcciones\(+\hat{\bf y}\) y, respectivamente, independientemente de la rotación del bucle. Una vez que el bucle gira alejándose de la posición mostrada en la Figura\(\PageIndex{2}\), las fuerzas\({\bf F}_B\) y\({\bf F}_D\) se convierten en distintas de cero; sin embargo, siempre son iguales y opuestas, y así no afectan la rotación. Así, el bucle girará un cuarto de vuelta y luego llegará a descansar, tal vez con alguna oscilación amortiguada alrededor de la posición de reposo dependiendo del momento del bucle. En la posición de reposo, los brazos de palanca para los segmentos A y C apuntan en las mismas direcciones que\({\bf F}_A\) y\({\bf F}_C\), respectivamente. Por lo tanto, el producto cruzado del brazo de palanca y la fuerza de traslación para cada segmento es cero y posteriormente\({\bf T}_A={\bf T}_C=0\). Una vez detenida en esta posición, tanto la fuerza traslacional neta como el par neto son cero.
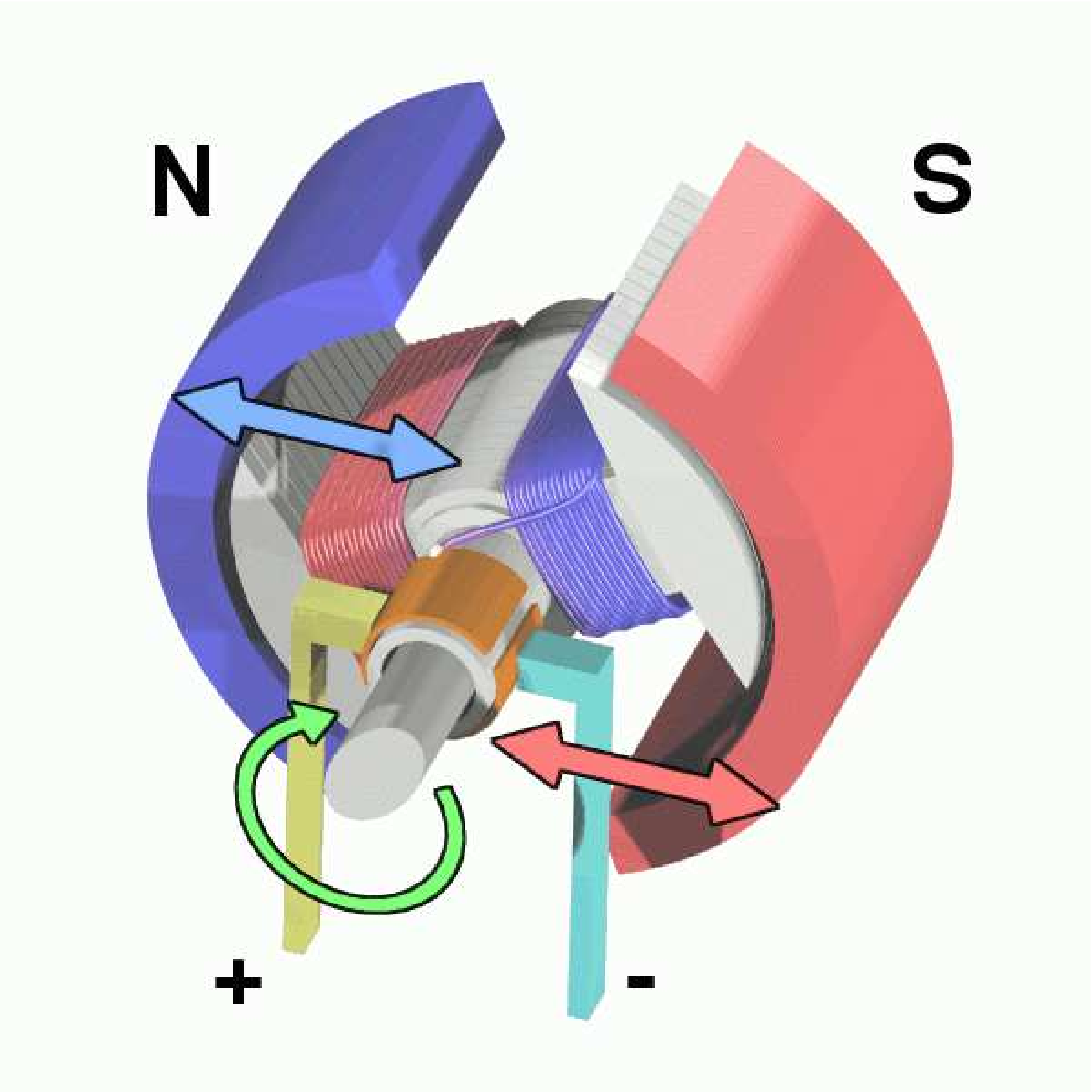
Si dicho dispositivo va a ser utilizado como motor, es necesario encontrar una manera de sostener la rotación. Hay varias formas en las que esto podría lograrse. Primero, se podría hacer\(I\) variable en el tiempo. Por ejemplo, la dirección de\(I\) podría invertirse a medida que el bucle pasa por la posición de un cuarto de vuelta. Esto invierte\({\bf F}_A\) y\({\bf F}_C\), impulsando el bucle hacia la posición de media vuelta. La dirección de se\(I\) puede cambiar nuevamente a medida que el bucle pasa por la posición de media vuelta, impulsando el bucle hacia la posición de tres cuartos de vuelta. Continuar con esta inversión periódica de la corriente sostiene la rotación. Alternativamente, se puede invertir periódicamente la dirección del campo magnético impresionado con el mismo efecto. Estos métodos pueden combinarse o aumentarse usando múltiples bucles de corriente o múltiples conjuntos de campos magnéticos impresos variables en el tiempo. Usando una combinación apropiada de bucles de corriente, campos magnéticos y formas de onda para cada uno, es posible lograr un par sostenido a lo largo de la rotación. Un ejemplo se muestra en la Figura\(\PageIndex{3}\).
Lectura adicional:
- “Torque” en Wikipedia.
- “Motor eléctrico” en Wikipedia.