
4.6: Construyendo sus propias ecuaciones de modelo con múltiples variables
- Page ID
- 115700
Podemos dar un paso más para aumentar la complejidad de la construcción de modelos, al incluir más de una variable. Siguiendo el tema del crecimiento poblacional, consideremos las interacciones ecológicas entre dos especies. Un escenario típico sería la interacción depredador-presa. Vamos a ceñirnos a la descripción poblacional del sistema para que cada especie pueda ser descrita por una variable (digamos,\(x\) y\(y\)). Lo primero que debes considerar es la dinámica inherente de cada variable, es decir, qué pasaría si no hubiera afluencias provenientes de otras variables. Si siempre hay suficiente comida disponible para la presa, podemos asumir lo siguiente:
- La presa crece si no hay depredadores.
- Los depredadores mueren si no hay presas.
Estas suposiciones pueden ilustrarse diagramáticamente en la Fig. 4.6.1.
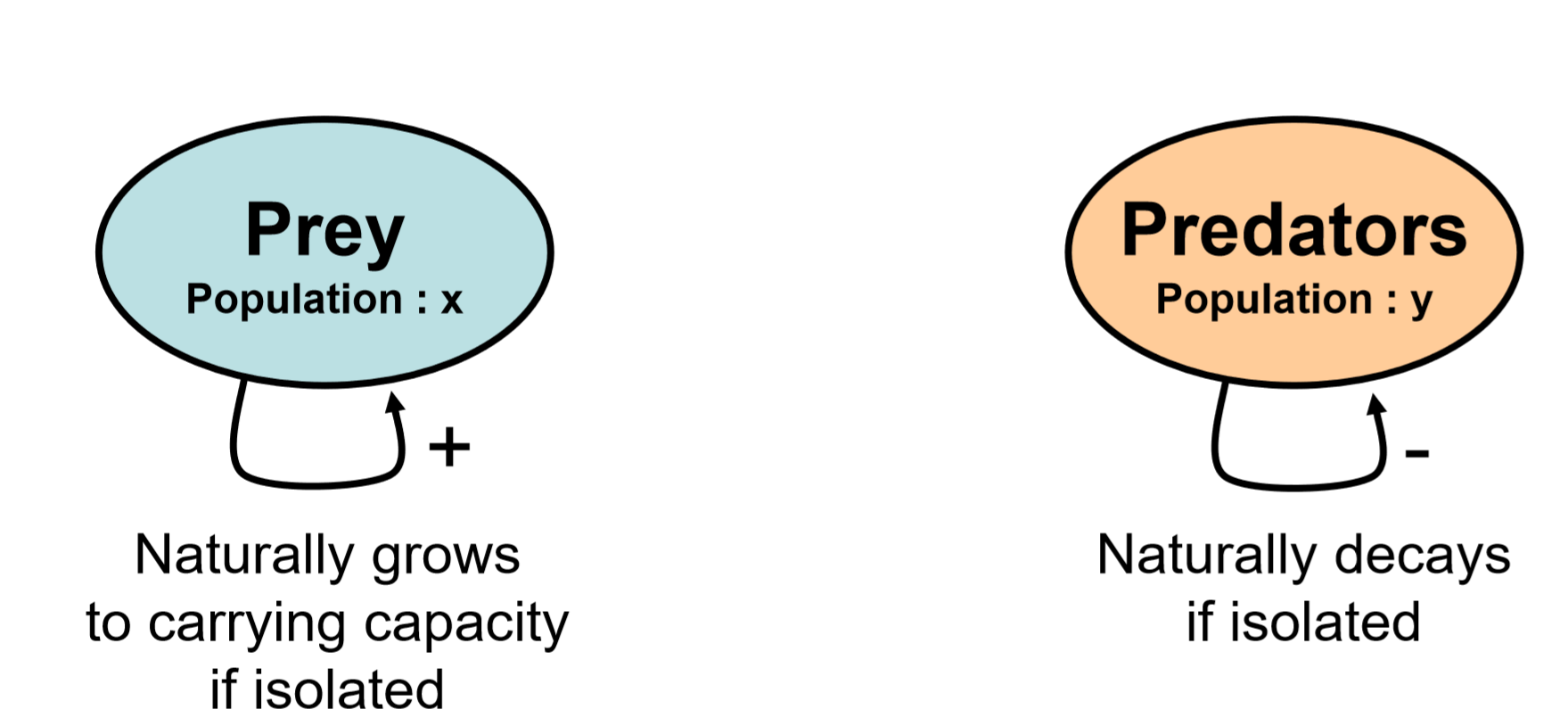
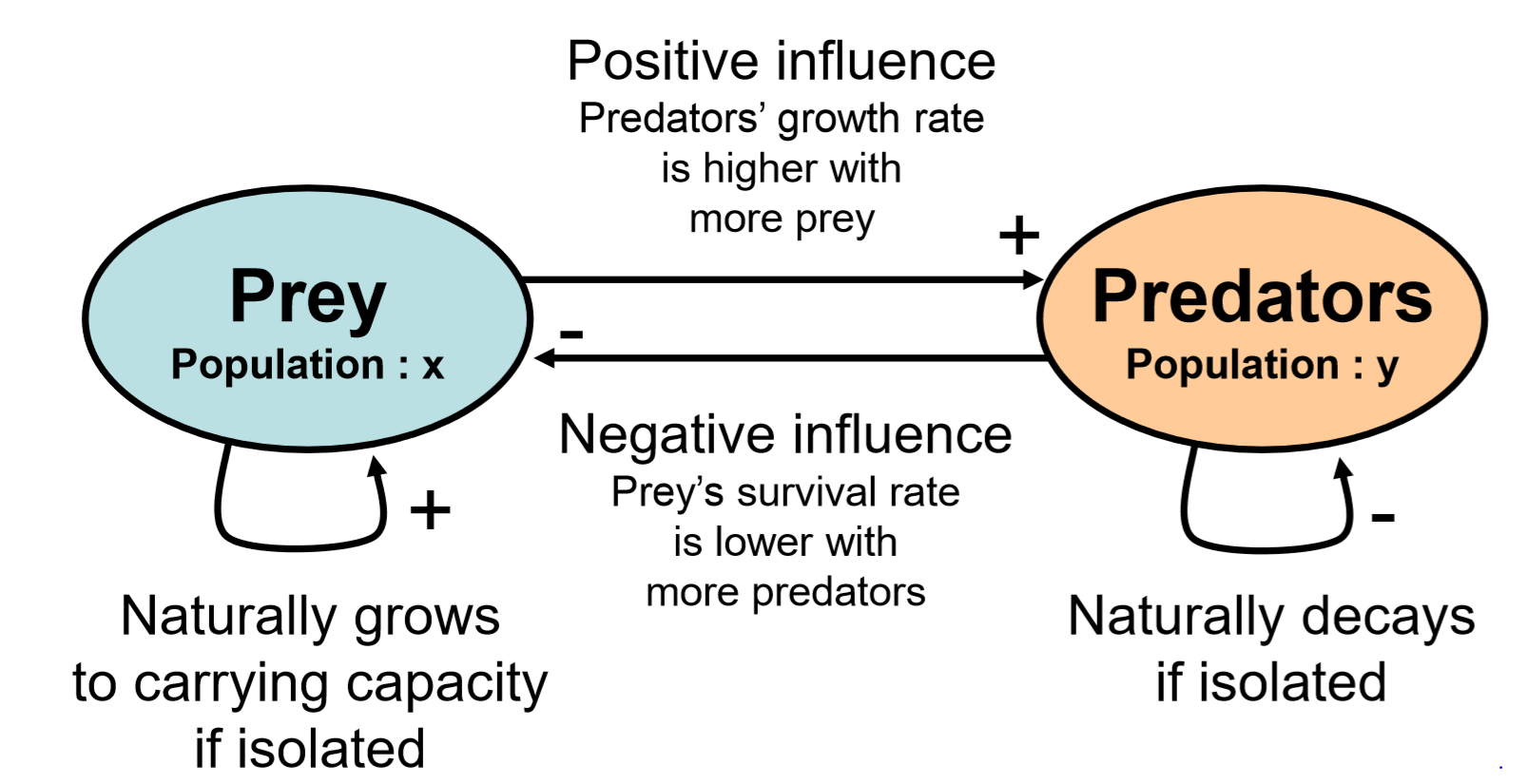
El tipo de diagramas en la Figura\(\PageIndex{1}\) se denomina diagrama de bucle causal en System Dynamics [26]. Cada círculo, o nodo, en este diagrama representa una variable de estado en el sistema. La flecha auto-bucle unida a cada nodo representa el efecto de las variables sobre sí mismo (por ejemplo, cuanta más presa haya, más rápido será su crecimiento, etc.). Los signos más/menos junto a las flechas muestran si el efecto es positivo o negativo. Ahora podemos considerar las interacciones entre las dos variables, es decir, cómo una variable influye en la otra y viceversa. Naturalmente, debería haber los siguientes efectos:
- La tasa de mortalidad de la presa aumenta a medida que aumenta la población depredadora.
- La tasa de crecimiento de los depredadores aumenta a medida que aumenta la población de presas.
Estas interacciones se pueden ilustrar como flechas entre nodos en el diagrama de bucle causal (Fig. 4.6.2).
Ahora es el momento de traducir la estructura del sistema ilustrado en el diagrama en ecuaciones matemáticas. Cada flecha del diagrama nos dice si el efecto es positivo o negativo, pero no dan ninguna forma matemática exacta, por lo que necesitaremos crear una representación matemática para cada uno (posiblemente usando los consejos antes mencionados).
La dinámica inherente de las dos variables es bastante sencilla de modelar. Como ya sabemos modelar el crecimiento y la decadencia, podemos simplemente tomar prestados esos modelos existentes como componentes de construcción, así:
\[x_{t} =x_{t-1}+r_{x}x_{t-1}(1-\frac{x_{t-1}}{K})\label{(4.28)} \]
\[y_{t}=y_{t-1} -d_{y}y_{t-1}\label{(4.29)} \]
Aquí, utilicé el modelo de crecimiento logístico para la presa\((x)\) mientras usé el modelo de decaimiento exponencial para los depredadores\((y)\). \(r_{x}\)es la tasa de crecimiento de la presa, y\(d_{y}\) es la tasa de mortalidad de los depredadores\((0 < dy < 1)\).
Para implementar suposiciones adicionales sobre las interacciones depredador-presa, necesitamos averiguar qué parte de las ecuaciones debe modificarse. En este ejemplo es obvio, porque ya sabemos que las interacciones deben cambiar la tasa de mortalidad de la presa y la tasa de crecimiento de los depredadores. Estos términos aún no están presentes en las ecuaciones anteriores, por lo que simplemente podemos agregar un nuevo término desconocido a cada ecuación:\[x_{t} =x_{t-1} +rx_{t-1}(1-\frac{x_{t-1}}{K})-d_{x}(y_{t-1})x_{t-1}\label{(4.30)} \]
\[y_{t}=y_{t-1} - dy_{t-1} +r_{y}(x_{t-1})y_{t-1}\label{(4.31)} \]
Ahora los problemas están mucho mejor definidos. Solo necesitamos llegar a una forma matemática para\(d_{x}\) y\(r_{y}\).
La tasa de mortalidad de la presa debe ser 0 si no hay depredadores, mientras que debería acercarse a 1 (¡= tasa de mortalidad del 100%!) si hay demasiados depredadores. Hay una serie de fórmulas matemáticas que se comportan de esta manera. Un ejemplo sencillo sería la siguiente función hiperbólica
\[d_{x}(y)=1-\frac{1}{by+1},\label{(4.32)} \]
donde\(b\) determina qué tan rápido\(d_{x}\) aumenta a medida que\(y\) aumenta. La tasa de crecimiento de los depredadores debe ser 0 si no hay presas, mientras que puede subir indefinidamente a medida que aumenta la población de presas. Por lo tanto, la forma matemática más simple posible podría ser
\[r_{y}(x) =cx,\label{(4.33)} \]
donde\(c\) determina qué tan rápido\(r_{y}\) aumenta a medida que\(x\) aumenta. Volvamos a poner estas funciones en las ecuaciones. Obtenemos lo siguiente:
\[x_{t} = x_{t-1} +rx_{t-1}(1-\frac{x_{t-1}}{K})-(1-\frac{1}{by_{t-1} +1})x_{t-1}\label{(4.34)} \]
\[y_{t} =y_{t-1}-dy_{t-1} +cx_{t-1}y_{t-1}\label{(4.35)} \]
Pruebe las ecuaciones anteriores asumiendo valores extremos para\(x\) y\(y\), y asegúrese de que el modelo se comporte como pretendíamos.
Implemente un código de simulación para las ecuaciones anteriores y observe el comportamiento del modelo para varios ajustes de parámetros.
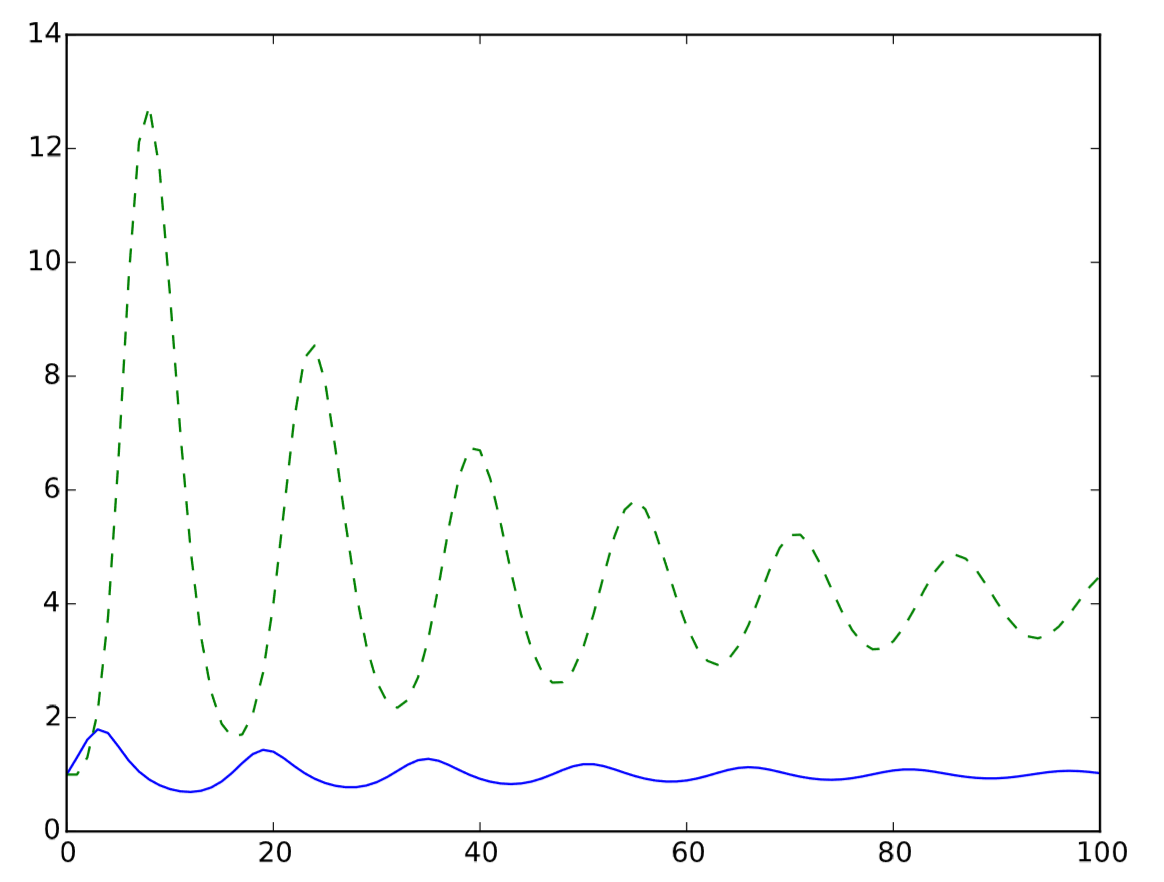
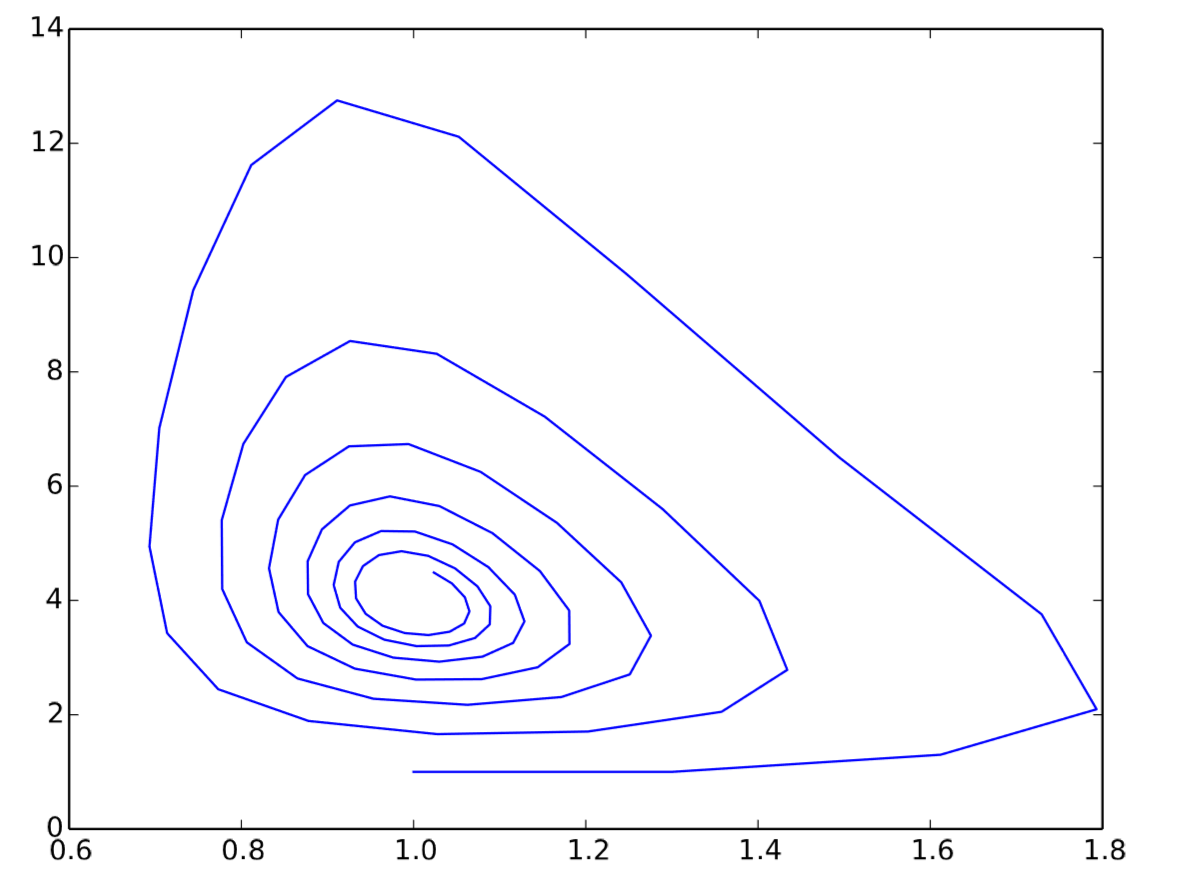
La Figura 4.6.3 muestra un resultado de simulación de muestra con\(r = b = d = c = 1\),\(K = 5\) y\(x_{0} = y_{0} = 1\). El sistema muestra un comportamiento oscilatorio, pero como indica su visualización de espacio de fase (Fig. 4.6.3 derecha), no es una oscilación armónica vista en sistemas lineales, sino una oscilación no lineal con órbitas distorsionadas.
El modelo que hemos creado anteriormente es en realidad una variación del modelo Lotka-Volterra, que describe diversas formas de interacciones depredador-presa. El modelo Lotka-Volterra es probablemente uno de los modelos matemáticos más famosos de sistemas dinámicos no lineales que involucra múltiples variables.
Pruebe varias configuraciones de parámetros diferentes para\(r,b,d\), y\(c\), y vea cómo cambia el comportamiento del sistema. En algunos casos puede encontrar un comportamiento poco realista e inválido (por ejemplo, crecimiento indefinido de depredadores). Si es así, revise el modelo para solucionar el problema.
En este capítulo, revisamos algunos conceptos básicos del modelado matemático en ecuaciones de diferencia. Como sigo diciendo, la mejor manera de aprender a modelar es a través de la práctica. Aquí hay algunos ejercicios más de modelaje. ¡Espero que los disfrutes!
Desarrollar un modelo matemático de tiempo discreto de dos especies compitiendo por el mismo recurso, y simular su comportamiento.
Considerar la dinámica de las opiniones públicas sobre las ideologías políticas. Por simplicidad, supongamos que sólo hay tres opciones: conservadora, liberal y neutral. Conservador y liberal son igualmente atractivos (o molestos, tal vez) para las personas, sin asimetría fundamental entre ellas. Las popularidades de las ideologías conservadoras y liberales pueden ser representadas por dos variables,\(p_{c}\) y\(p_{t}\), respectivamente\((0 ≤ pc ≤ 1; 0 ≤ pl ≤ 1; 0 ≤ pc + pl ≤ 1)\). Esto implica que\(1−p_{c} −p_{l} = p_{n}\) representa la popularidad del neutral.
Supongamos que en cada encuesta electoral, la gente cambiará sus estados ideológicos entre las tres opciones según las popularidades irrelativas de la encuesta anterior. Por ejemplo, la tasa de cambio de opción\(X\) a opción\(Y\) puede considerarse proporcional a\((p_{Y} − p_{X})\) si\(p_{Y} > p_{X}\), o 0 de otro modo. Debe considerar seis casos diferentes de tales comportamientos de cambio (conservador a liberal, conservador a neutral, liberal a conservador, liberal a neutral, neutral a conservador y neutral a liberal) y representarlos en ecuaciones dinámicas. Completar un modelo matemático de tiempo discreto que describa este sistema y simule su comportamiento. Vea cuáles son los posibles resultados finales después de un periodo de tiempo suficientemente largo.
Completar un modelo matemático de tiempo discreto que describa este sistema y simule su comportamiento. Vea cuáles son los posibles resultados finales después de un periodo de tiempo suficientemente largo.
Revisar el modelo de dinámica de opinión pública desarrollado en el ejercicio anterior para que los partidos políticos de las dos ideologías (conservadora y liberal) lleven a cabo una campaña política para promover el cambio de votantes a sus ideologías desde sus competencias, a un ritmo\(inversely\) proporcional a su actual popularidad (es decir, cuanto menos populares sean, más intensa será su campaña). Simular el comportamiento de este modelo revisado y ver cómo tal campaña política cambia la dinámica del sistema.