
18.3: Sincronizabilidad
- Page ID
- 115660
Una interesante aplicación de la conectividad intersticial/algebraica espectral es determinar la sincronizabilidad de los nodos dinámicos acoplados linealmente, los cuales pueden formularse de la siguiente manera:
\[\frac{dx_{i}}{dt} =R(x_{i}) +\alpha{\sum_{j\epsilon{N_{i}}}(H(x_j) -H(x_i)}) \label{(18.6)} \]
Aquí\(x_i\) está el estado de nodo\(i\),\(R\) es el término de reacción local que produce el comportamiento dinámico inherente de los nodos individuales, y\(N_i\) es la vecindad del nodo\(i\). Suponemos que\(R\) es idéntico para todos los nodos, y produce una trayectoria particular\(x_s(t)\) si no hay interacción con otros nodos. A saber,\(x_s(t)\) se da como la solución de la ecuación diferencial\(dx/dt = R(x)\). \(H\)se llama la función de salida que se aplica homogéneamente a todos los nodos. La función de salida se utiliza para generalizar la interacción y difusión entre nodos; en lugar de suponer que los propios estados de nodo son directamente visibles para otros, asumimos que cierto aspecto de los estados de nodo (representados por\(H(x)\)) es visible y difunde a otros nodos.
La ecuación\ ref {(18.6)} puede simplificarse aún más usando la matriz Laplaciana, de la siguiente manera:
\[\frac{dx_i}{dt} =R(x_i) -\alpha{L} \begin{pmatrix} H(x_1) \\ H(x_2) \\ \vdots \\ H(x_n)\end{pmatrix} \label{(18.7)} \]
Ahora queremos estudiar si esta red de nodos dinámicos acoplados puede sincronizarse o no. La sincronización es posible si y sólo si la trayectoria\(x_i(t) = x_s(t)\) para todos\(i\) es estable. Se trata de un nuevo concepto, es decir, estudiar la estabilidad de una trayectoria dinámica, no de un estado de equilibrio estático. Pero todavía podemos adoptar el mismo procedimiento básico de análisis de estabilidad lineal: representar el estado del sistema como la suma del estado objetivo y una pequeña perturbación, y luego verificar si la perturbación crece o se contrae con el tiempo. Aquí representamos el estado de cada nodo de la siguiente manera:
\[x_i(t) =x_s(t) +\Delta{x_i(t)} \label{(18.8)} \]
Al conectar esta nueva expresión a la ecuación\ ref {(18.7)}, obtenemos
\[\frac{d(x_s+\Delta{x_i})}{dt} =R(x_s+\Delta{x_i})- \alpha{L} \begin{pmatrix} H(x_s+\Delta{x_1}) \\ H(x_s+\Delta{x_2}) \\ \vdots \\ H(x_s +\Delta{x_n})\end{pmatrix} \label{(18.9)} \]
Dado que\(∆x_i\) son muy pequeños, podemos aproximarnos linealmente\(R\) y de la\(H\) siguiente manera:
\[\frac{dx_s}{dt} +\frac{d\Delta{x_i}}{dt} =R(x_s) +R'(x_s)\Delta{x_i}-\alpha{L} \begin{pmatrix} H(x_s)+H'(x_s)\Delta{x_1} \\ H(x_s)+H'(x_s)\Delta{x_2} \\ \vdots \\ H(x_s)+ H'(x_s)\Delta{x_n}\end{pmatrix} \label{(18.10)} \]
Los primeros términos de ambos lados se cancelan entre sí porque xs es la solución de\(dx/dt = R(x)\) por definición. Pero, ¿qué pasa con esos molestos\(H(x_s)\) incluidos en el vector en el último término? ¿Hay alguna manera de eliminarlos? Bueno, la respuesta es que no tenemos que hacer nada, porque la matriz laplaciana se los comerá a todos. Recuerda que una matriz laplaciana siempre satisface\(Lh = 0\). En este caso, esos\(H(x_s)\) constituyen un vector homogéneo en\(H(x_s)h\) conjunto. Por lo tanto, se\( L(H(x_s)h) = H(x_s)Lh\) desvanece inmediatamente, y obtenemos
\[\frac{d\Delta{x}}{dt} =R'(x_s)\Delta{x_i}-\alpha{H'}(x_s)L \begin{pmatrix} \Delta{x_1} \\ \Delta{x_2} \\ \vdots \\ \Delta{x_{n}} \end{pmatrix}, \label{(18.11)} \]
o, recogiendo todos los\(∆x_i\)'s en un nuevo vector de perturbación\(∆x\),
\[\frac{d\Delta{x}}{dt} =(R'(x_s)I -\alpha{H'}(x_s)L)\Delta{x}, \label{(18.12)} \]
como resultado final de linealización. Obsérvese que\(x_s\) aún cambia con el tiempo, por lo que para que esta trayectoria sea estable, todos los valores propios de esta matriz de coeficientes bastante complicada\((R'(x_s)I −αH'(x_s)L)\) deben indicar siempre estabilidad en cualquier momento.
Podemos ir aún más lejos. Se sabe que los valores propios de una matriz\(aX+bI\) son\(aλ_i+b\), donde\(λ_i\) están los valores propios de\(X\). Entonces, los valores propios de\((R'(x_s)I −αH'(x_s)L\) son
\[-\alpha{\lambda_{i}}H'(x_s) +R'(x_s), \label{(18.13)} \]
donde\(λ_i\) están\(L\) 'sneigenvalues. El valor propio que corresponde al valor propio más pequeño de\(L\), 0, es justo\(R'(x_s)\), que está determinado únicamente por la dinámica inherente de\(R(x)\) (y por lo tanto la naturaleza de\(x_s(t))\), por lo que no podemos hacer nada al respecto. Pero todos los demás\(n − 1\) valores propios deben ser negativos todo el tiempo, para que la trayectoria objetivo\(x_s(t)\) sea estable. Entonces, si representamos el segundo valor propio más pequeño (la brecha espectral para redes conectadas) y el valor propio más grande de\(L\) by\(λ_{2}\) y\(λ_n\), respectivamente, entonces los criterios de estabilidad se pueden escribir como
\[\alpha{\lambda_{i}}H'(x_{s}(t)) >R' (x_{s}(t)) \qquad{\text{for all t, and}} \label{(18.14)} \]
\[\alpha{\lambda_n}H'(x_s(t)) >R'(x_s(t)) \qquad{\text{ for all t, }} \label{(18.15)} \]
porque todos los demás valores propios intermedios están “intercalados” por\(λ_2\) y\(λ_n\). Estas desigualdades nos proporcionan una agradable interpretación intuitiva de la condición de estabilidad: la influencia de la difusión de las salidas de los nodos (lado izquierdo) debe ser más fuerte que la impulsión dinámica interna (lado derecho) todo el tiempo.
Obsérvese que, aunque\(α\) y ambos no\(λ_i\) sean negativos,\(H'(xs(t))\) podrían ser positivos o negativos, por lo que la desigualdad es más importante depende de la naturaleza de la función de salida\(H\) y de la trayectoria\(x_s(t)\) (que está determinada por el término de reacción\(R\)). Si\(H'(x_s(t))\) siempre permanece no negativo, entonces la primera desigualdad es suficiente (ya que la segunda desigualdad sigue naturalmente como\(λ_2 ≤ λ_n\)), y así la brecha espectral es la única información relevante para determinar la sincronizabilidad de la red. Pero si no, debemos considerar tanto la brecha espectral como el valor propio más grande de la matriz laplaciana.
Aquí hay un ejemplo sencillo. Supongamos que un montón de nodos están oscilando a un ritmo exponencialmente acelerado:
\[\frac{d\theta_i}{dt} =\beta{\theta_i} +\alpha \sum_{j \epsilon{N_i} (\theta_{j} - \theta_{i})} \label{(18.16)} \]
Aquí,\(θ_i\) es la fase de nodo\(i\), y\(β\) es la tasa de aceleración exponencial que se aplica homogéneamente a todos los nodos. También asumimos que los valores reales de θi se difunden hacia y desde los nodos vecinos a través de los bordes. Por lo tanto,\(R(θ) = βθ\) y\(H(θ) = θ\) en este modelo.
Podemos analizar la sincronizabilidad de este modelo de la siguiente manera. Ya que\(H'(θ) = 1 > 0\), inmediatamente sabemos que la desigualdad\ ref {(18.14)} es el único requisito en este caso. También\(R'(θ) = β\), por lo que la condición para la sincronización viene dada por
\[\alpha{\lambda_2} > \beta, \text{or} \lambda_2 > \frac{\beta}{\alpha}. \label{(18.17)} \]
Muy fácil. Comprobemos este resultado analítico con simulaciones numéricas en la gráfica de Karate Club. Sabemos que su brecha espectral es de 0.4685, por lo que si\(β/α\) está por debajo (o por encima) de este valor, la sincronización debería (o no debería) ocurrir. Aquí está el código para tales simulaciones:
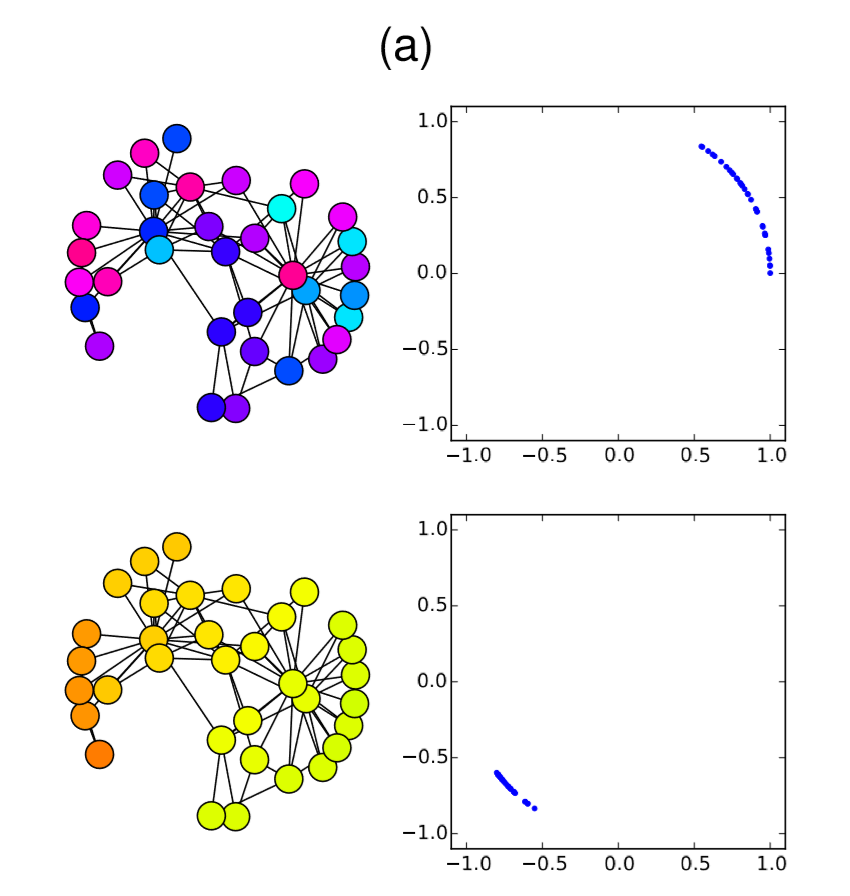
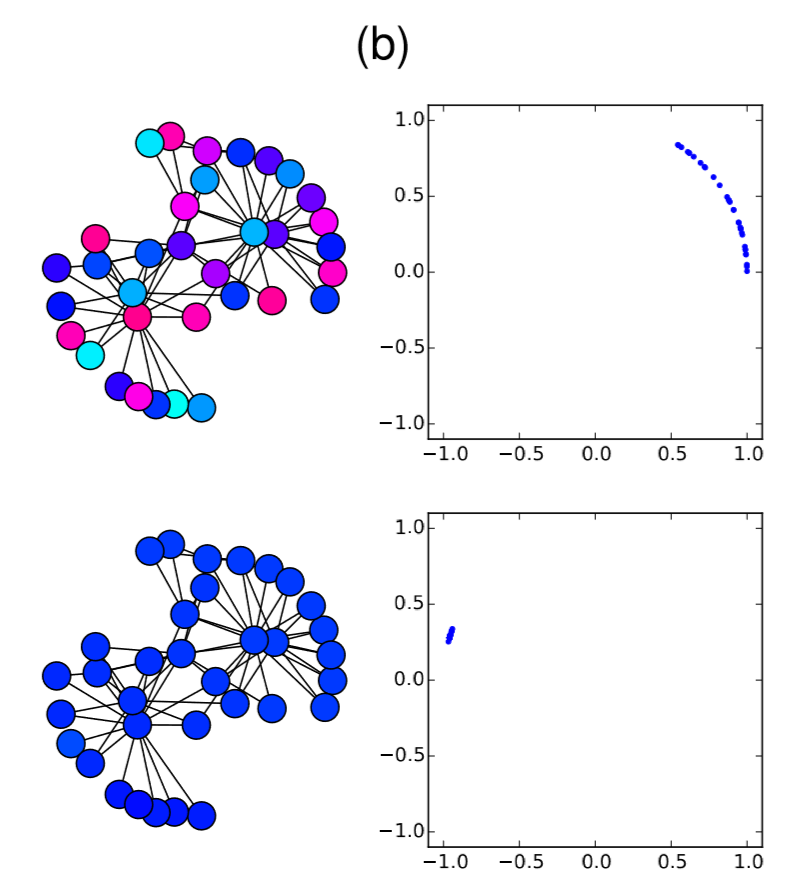
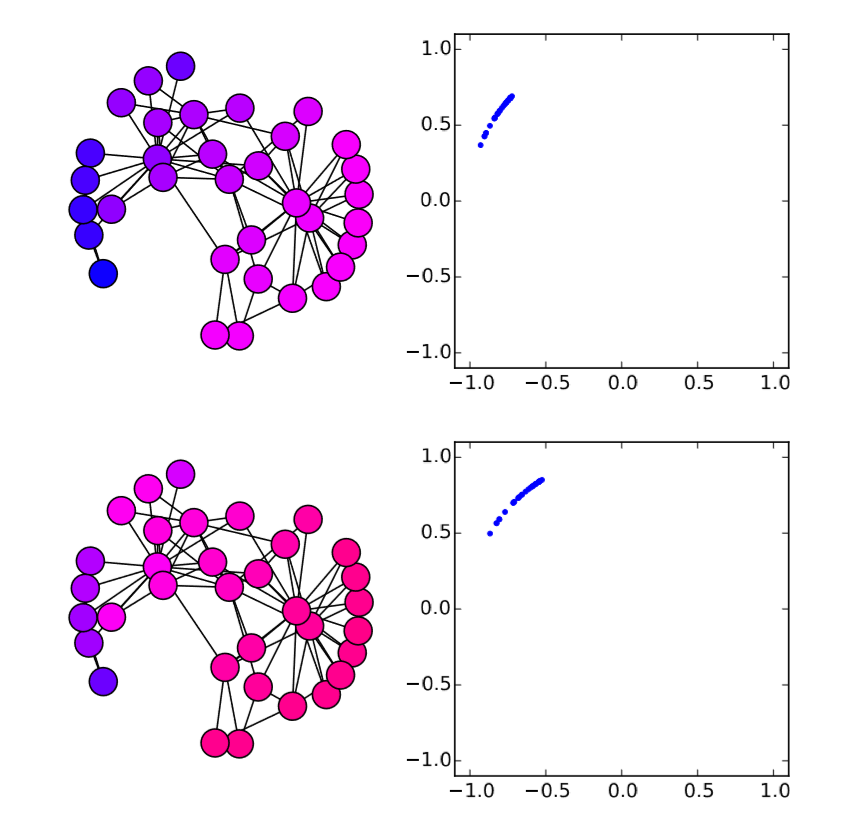
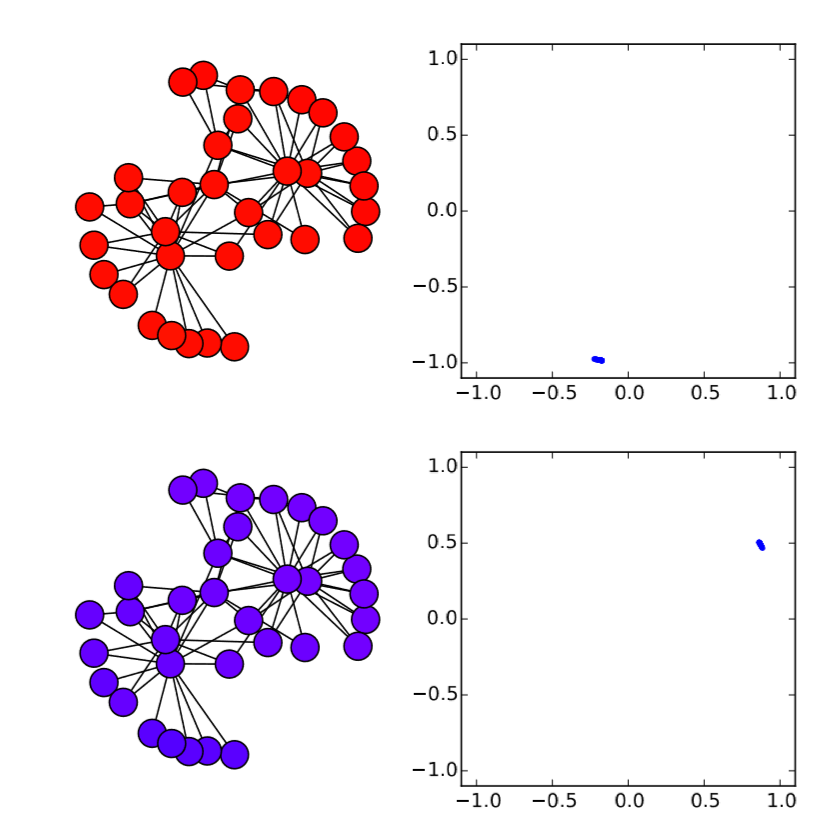
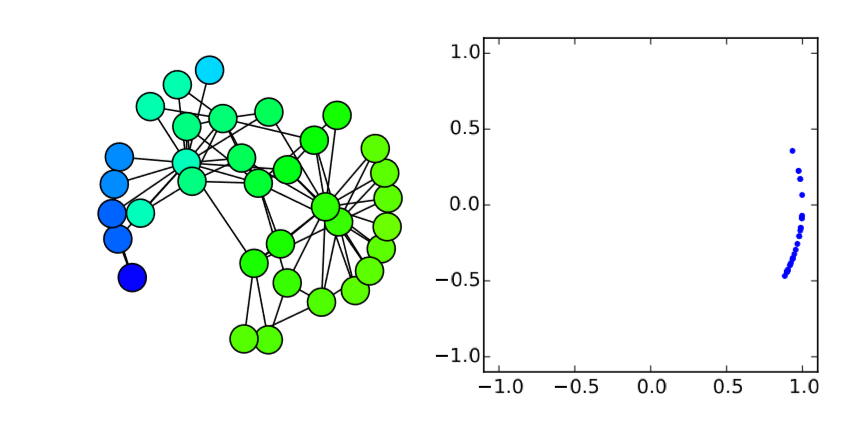
Aquí agregué una segunda trama que muestra la distribución de fases en un\((x,y) = (cos{θ},sin{θ})\) espacio, solo para ayudar a la comprensión visual.
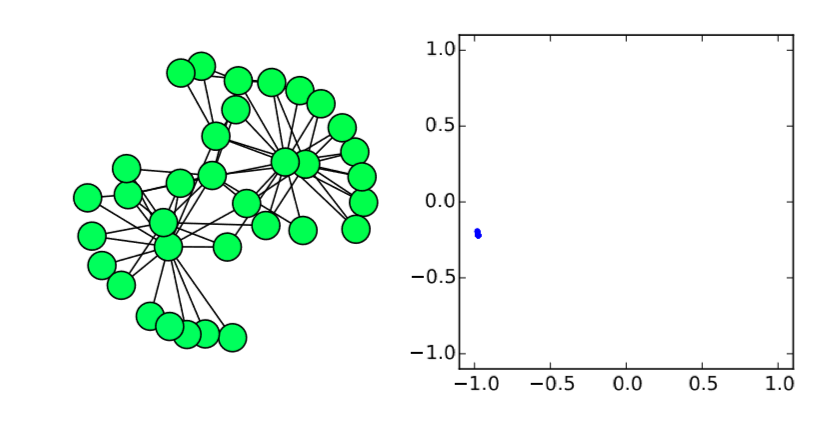
En el código anterior, los valores de los parámetros se establecen en alpha = 2 y beta = 1, entonces\(λ_2 0.4685 < β/α = 0.5\). Por lo tanto, se predice que los nodos no se sincronizarán. Y, de hecho, el resultado de la simulación confirma esta predicción (Fig. 18.3.1 (a)), donde los nodos inicialmente se acercaron entre sí en sus fases pero, a medida que su velocidad de oscilación se hizo cada vez más rápida, finalmente volvieron a dispersarse y la red no logró la sincronización. Sin embargo, si beta se baja ligeramente a 0.9 de manera que\(λ_2 = 0.4685 > β/α = 0.45\), el estado sincronizado se vuelve estable, lo que se confirma nuevamente en la simulación numérica (Fig. 18.3.1 (b)). Es interesante que un cambio tan ligero en el valor del parámetro puede causar una diferencia importante en la dinámica global de la red. Además, es bastante sorprendente que el análisis de estabilidad lineal pueda predecir este cambio con tanta precisión. ¡Análisis matemático rocas!
Aleatorio de la topología de la gráfica Karate Club y mide su brecha espectral. Determinar analíticamente la sincronizabilidad del modelo de osciladores aceleradores discutido anteriormente con\(α = 2\),\(β = 1\) en la red aleatoria. Después confirme su predicción mediante simulaciones numéricas. También puedes probar varias otras topologías de red.
El siguiente es un modelo de osciladores armónicos acoplados donde los estados de nodo complejos se utilizan para representar la oscilación armónica en una ecuación diferencial de una sola variable:
\[ \frac{dx_i}{dt} =i\omega{x_i} +\alpha \sum{j\epsilon{N_i}(x^{\gamma}_{j} -x^{y}_{i})} \label{(18.18)} \]
Aquí i se usa para denotar la unidad imaginaria para evitar confusiones con el índice de nodo i. Dado que los estados son complejos, necesitará usar\(Re(·)\) en ambos lados de las desigualdades\ ref {(18.14)} y\ ref {(18.15)} para determinar la estabilidad.
Analizar la sincronizabilidad de este modelo en la gráfica Karate Club, y obtener la condición de sincronización respecto al exponente de salida\(γ\). Después confirme su predicción mediante simulaciones numéricas.
Es posible que haya notado que el análisis de sincronizabilidad discutido anteriormente es algo similar al análisis de estabilidad de los modelos de campo continuos discutidos en el Capítulo 14. De hecho, son esencialmente la misma técnica analítica (aunque no cubrimos el análisis de estabilidad de trayectorias dinámicas en ese entonces). La única diferencia es si el espacio se representa como un campo continuo o como una red discreta. Para los primeros, la difusión
está representado por el operador laplaciano\(∇^2\), mientras que para este último, está representado por la matriz laplaciana\(L\) (¡nótese nuevamente que sus signos son opuestos para la desgracia histórica!). Los modelos de red nos permiten estudiar estructuras espaciales más complicadas y no triviales, pero no hay aspectos fundamentalmente diferentes entre estos dos marcos de modelado. Es por ello que el mismo enfoque analítico funciona para ambos.
Tenga en cuenta que el análisis de sincronizabilidad que cubrimos en esta sección sigue siendo bastante limitado en su aplicabilidad a modelos de redes dinámicas más complejos. Se basa en el supuesto de que los nodos dinámicos son homogéneos y que están acoplados linealmente, por lo que el análisis no puede generalizar a los comportamientos de redes dinámicas heterogéneas con acoplamientos no lineales, como el modelo de Kuramoto discutido en la Sección 16.2 en el que los nodos oscilan en diferentes frecuencias y sus acoplamientos son no lineales. El análisis de tales redes necesitará técnicas analíticas no lineales más avanzadas, lo que está más allá del alcance de este libro de texto.