
18.4: Fórmula de Euler
- Page ID
- 114730

\(\alpha\)Déjese ser un número real. La siguiente identidad se llama fórmula de Euler:
\[e^{i\cdot\alpha}=\cos\alpha+i\cdot\sin\alpha.\]
En particular,\(e^{i\cdot\pi}=-1\) y\(e^{i\cdot\frac\pi2}=i\).
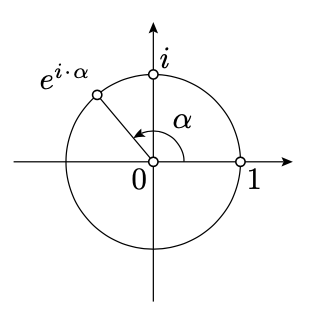
Geométricamente, la fórmula de Euler significa lo siguiente: Supongamos que\(O\) y\(E\) son los puntos con coordenadas complejas\(0\) y\(1\) respectivamente. Asumir
\(OZ=1\quad \text{and}\quad \measuredangle EOZ \equiv \alpha,\)
entonces\(e^{i\cdot\alpha}\) es la compleja coordenada de\(Z\). En particular, la coordenada compleja de cualquier punto del círculo unitario centrado en\(O\) puede expresarse de manera única como\(e^{i\cdot\alpha}\) para algunos\(\alpha\in(-\pi,\pi]\).
La prueba de la identidad de Euler depende de la forma en que defina la función exponencial. Si nunca tuviste que aplicar la función exponencial a un número imaginario, puedes tomar el lado derecho en 18.4.1 como definición del\(e^{i\cdot\alpha}\).
En este caso, formalmente no hay que probar nada, pero es mejor verificar que\(e^{i\cdot\alpha}\) satisfaga identidades familiares. Principalmente,
\(e^{i\cdot \alpha}\cdot e^{i\cdot \beta}= e^{i\cdot(\alpha+\beta)}.\)
Esto último se puede probar usando 18.1.2 y las siguientes fórmulas trigonométricas, que suponemos que se conocen:
\(\begin{aligned} \cos(\alpha+\beta)&=\cos\alpha\cdot\cos\beta-\sin\alpha\cdot\sin\beta, \\ \sin(\alpha+\beta)&=\sin\alpha\cdot\cos\beta+\cos\alpha\cdot\sin\beta.\end{aligned}\)
Si conoces la serie de potencias para la función sinusoidal, coseno y exponencial, entonces lo siguiente podría convencer de que la identidad 18.4.1 se mantiene:
\(\begin{aligned} e^{i\cdot \alpha } &{}= 1 + i\cdot \alpha + \frac{(i\cdot \alpha )^2}{2!} + \frac{(i\cdot \alpha )^3}{3!} + \frac{(i\cdot \alpha )^4}{4!} + \frac{(i\cdot \alpha )^5}{5!} + \cdots = \\ &= 1 + i\cdot \alpha - \frac{\alpha ^2}{2!} - i\cdot\frac{ \alpha ^3}{3!} + \frac{\alpha ^4}{4!} + i\cdot\frac{ \alpha ^5}{5!} - \cdots = \\ &= \left( 1 - \frac{\alpha ^2}{2!} + \frac{\alpha ^4}{4!} - \cdots \right) + i\cdot\left( \alpha - \frac{\alpha ^3}{3!} + \frac{\alpha ^5}{5!} - \cdots \right) = \\ &= \cos \alpha + i\cdot\sin \alpha.\end{aligned}\)