
11.2: Cadena de Markov y Procesos Estocásticos
- Page ID
- 69617
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Trabajando nuevamente con el mismo problema en una dimensión, intentemos escribir una ecuación de movimiento para la distribución de probabilidad de caminata aleatoria:\(P(x,t)\).
- Este es un ejemplo de un proceso estocástico, en el que la evolución de un sistema en tiempo y espacio tiene una variable aleatoria que necesita ser tratada estadísticamente.
- Como antes, el movimiento de un andador sólo depende de la posición en la que se encuentre, y no de ningún escalón precedente. Cuando el sistema no tiene memoria de dónde estaba antes, lo llamamos sistema markoviano.
- En términos generales, hay muchos sabores de un problema estocástico en el que se describe la probabilidad de estar en una posición\(x\) a la vez\(t\), y estos se pueden categorizar por si\(x\) y\(t\) son tratados como variables continuas o discretas. La clase de problema que estamos discutiendo con discretos\(x\) y\(t\) puntos se conoce como una Cadena Markov. El caso donde el espacio se trata discretamente y el tiempo continuamente da como resultado una Ecuación Maestra, mientras que una ecuación de Langevin o ecuación de Fokker—Planck describe el caso de continuo\(x\) y\(t\).
- Para describir la dependencia del tiempo de los caminantes, relacionamos la distribución de probabilidad en un punto en el tiempo\(P(x,t+Δt)\), con la distribución de probabilidad para el paso de tiempo anterior,\(P(x,t)\) en términos de las probabilidades de que un caminante haga un paso a la derecha (\(P_+\)) o a la izquierda (\(P_-\)) durante el intervalo\(Δt\). Tenga en cuenta\(P_+\neq P_-\), cuando, hay un sesgo de paso en el sistema. Si\(P_+ + P_-<1\), hay una resistencia a pisar ya sea como resultado de una barrera energética o volumen excluido en la cadena.
- Además de la pérdida de probabilidad al alejarse de x a la izquierda o derecha, necesitamos dar cuenta de los pasos de sitios adyacentes que terminan en\(x\).
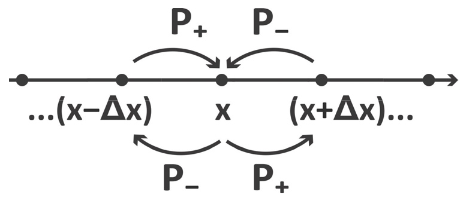
Entonces la probabilidad de observar la partícula en posición\(x\) durante el intervalo\(Δ\) t es:
\[\begin{aligned} P(x,t+\Delta t) &= P(x,t)-P_+\cdot P(x,t) -P_- \cdot P(x,t) +P_+\cdot P(x-\Delta x,t)+P_- \cdot P(x+\Delta x,t) \\[4pt] &= (1-P_+-P_-) \cdot P(x,t)+P_+ \cdot P(x-\Delta x,t) +P_- \cdot P(x+\Delta x,t) \\[4pt] &= P(x,t) + P_+[P(x-\Delta x,t)-P(x,t)]+ P_-[P(x+\Delta x,t)-P(x,t)] \end{aligned} \]
y la probabilidad de cambio neto es
\[ P(x,t+\Delta t) - P(x,t) = P_+[P(x-\Delta x,t) - P(x,t)]+P_-[P(x+\Delta x,t)-P(x,t)] \nonumber \]
Podemos lanzar esto como una derivada del tiempo si dividimos el cambio de probabilidad por el paso de tiempo Δt:
\[ \begin{aligned} \dfrac{\partial P}{\partial t} &= \dfrac{P(x,t+\Delta t)-P(x,t)}{\Delta t} \\[4pt] &= P_+[P(x-\Delta x,t) - P(x,t)]+P_-[P(x+\Delta x,t)-P(x,t)] \\[4pt] &= P_+ \Delta P_-(x,t)+P_-\Delta P_+(x,t) \end{aligned} \]\[\]
¿Dónde\(P_{\pm} = P_{\pm} / \Delta t\) está la velocidad de escalonamiento derecha e izquierda, y\( \Delta P_{\pm}(x,t) = P(x \pm \Delta x,t)-P(x,t) \)
Nos gustaría mostrar que este modelo de caminata aleatoria da como resultado una ecuación de difusión para la densidad de probabilidad ρ (x, t) que deducimos en la Ecuación (11.1.5). Para simplificar, suponemos que las probabilidades de paso a la izquierda y derecha\(P_+=P_-=\frac{1}{2}\), y sustituyen
\[ P(x,t) = \rho (x,t) dx \nonumber \]
en la Ecuación (11.2.1):
\[ \dfrac{\partial \rho}{\partial t} = P[\rho(x-\Delta x,t)-2 \rho (x,t)+\rho (x+\Delta x,t)] \nonumber \]
donde\(P=1/2 \, \Delta t \). Luego expandimos estos términos de densidad de probabilidad en x como
\[ \rho (x,t) = \rho (0,t) + \dfrac{\partial \rho}{\partial x} x+\dfrac{1}{2} \dfrac{\partial^2 \rho}{\partial x^2} x^2 \nonumber \]
y encontrar que la densidad de probabilidad sigue una ecuación de difusión
\[ \dfrac{\partial \rho}{\partial t} = D \dfrac{\partial^2 \rho}{\partial x^2} \nonumber \]
donde\(D= \Delta x^2/2 \Delta t\).
___________________________________
Materiales de lectura
- A. Nitzan, Dinámica Química en Fases Condensadas: Relajación, Transferencia y Reacciones en Sistemas Molecular Condensados. (Oxford University Press, Nueva York, 2006).