
32.9: Serie y límites
- Page ID
- 79714
Serie Maclaurin
Una función\(f(x)\) puede expresarse como una serie en potencias de tanto tiempo\(x\) como\(f(x)\) y todas sus derivadas son finitas en\(x=0\). Por ejemplo, vamos a probar en breve que la función se\(f(x) = \dfrac{1}{1-x}\) puede expresar como la siguiente suma infinita:
\[\label{eq1}\dfrac{1}{1-x}=1+x+x^2+x^3+x^4 + \ldots\]
Podemos escribir esta declaración de esta manera más elegante:
\[\label{eq2}\dfrac{1}{1-x}=\displaystyle\sum_{n=0}^{\infty} x^{n}\]
Si no estás familiarizado con esta notación, el lado derecho de la ecuación lee “sum from\(n=0\) to\(n=\infty\) of\(x^n.\)” When\(n=0\),\(x^n = 1\), when\(n=1\)\(x^n = x\), when\(n=2\),\(x^n = x^2\), etc (compare with Equation\ ref {eq1}). El término “serie en potencias de\(x\)” significa una suma en la que cada suma es una potencia de la variable\(x\). Tenga en cuenta que el número 1 es una potencia de\(x\) as well (\(x^0=1\)). Además, tenga en cuenta que ambas Ecuaciones\ ref {eq1} y\ ref {eq2} son exactas, no son aproximaciones.
Del mismo modo, veremos en breve que la función se\(e^x\) puede expresar como otra suma infinita en potencias de\(x\) (es decir, una serie Maclaurin) como:
\[\label{expfunction}e^x=1+x+\dfrac{1}{2} x^2+\dfrac{1}{6}x^3+\dfrac{1}{24}x^4 + \ldots \]
O, más elegantemente:
\[\label{expfunction2}e^x=\displaystyle\sum_{n=0}^{\infty}\dfrac{1}{n!} x^{n}\]
donde\(n!\) se lee “n factorial” y representa el producto\(1\times 2\times 3...\times n\). Si no estás familiarizado con las factoriales, asegúrate de entender por qué\(4! = 24\). Además, recuerda eso por definición\(0! = 1\), no cero.
En este punto deberías tener dos preguntas: 1) cómo construyo la serie Maclaurin de una función dada, y 2) por qué en la tierra querría hacer esto si\(\dfrac{1}{1-x}\) y\(e^x\) son funciones de aspecto fino como son. La respuesta a la primera pregunta es fácil, y aunque deberías saber esto por tus clases de cálculo la volveremos a revisar en un momento. La respuesta a la segunda pregunta es más complicada, y es lo que la mayoría de los estudiantes encuentran confuso sobre este tema. Discutiremos diferentes ejemplos que tienen como objetivo mostrar una variedad de situaciones en las que expresar funciones de esta manera es útil.
Cómo obtener la serie Maclaurin de una función
En general, una función de buen comportamiento (\(f(x)\)y todas sus derivadas son finitas en\(x=0\)) se expresará como una suma infinita de poderes de\(x\) así:
\[\label{eq3}f(x)=\displaystyle\sum_{n=0}^{\infty}a_n x^{n}=a_0+a_1 x + a_2 x^2 + \ldots + a_n x^n\]
Asegúrese de entender por qué las dos expresiones en la Ecuación\ ref {eq3} son formas idénticas de expresar una suma infinita. Los términos\(a_n\) se llaman los coeficientes, y son constantes (es decir, NO son funciones de\(x\)). Si terminas con la variable\(x\) en uno de tus coeficientes vuelve atrás y comprueba lo que hiciste mal! Por ejemplo, en el caso de\(e^x\) (Ecuación\ ref {expfunction}),\(a_0 =1, a_1=1, a_2 = 1/2, a_3=1/6, etc\). En el ejemplo de Ecuación\ ref {eq1}, todos los coeficientes son iguales a 1. Acabamos de ver que dos funciones muy diferentes se pueden expresar usando el mismo conjunto de funciones (los poderes de\(x\)). Lo que hace\(\dfrac{1}{1-x}\) diferente\(e^x\) son los coeficientes\(a_n\). Como veremos en breve, los coeficientes pueden ser negativos, positivos o cero.
¿Cómo calculamos los coeficientes? Cada coeficiente se calcula como:
\[\label{series:coefficients}a_n=\dfrac{1}{n!} \left( \dfrac{d^n f(x)}{dx^n} \right)_0\]
Es decir, el coeficiente\(n\) -ésimo equivale a uno sobre el factorial de\(n\) multiplicado por la\(n\) -ésima derivada de la función\(f(x)\) evaluada a cero. Por ejemplo, si queremos calcular\(a_2\) para la función\(f(x)=\dfrac{1}{1-x}\), necesitamos obtener la segunda derivada de\(f(x)\), evaluarla en\(x=0\), y dividir el resultado por\(2!\). Hazlo tú mismo y verifícalo\(a_2=1\). En el caso de\(a_0\) necesitamos la derivada de orden cero, que iguala a la función misma (es decir,\(a_0 = f(0)\), porque\(\dfrac{1}{0!}=1\)). Es importante destacar que aunque las derivadas suelen ser funciones de\(x\), los coeficientes son constantes porque se expresan en términos de las derivadas evaluadas en\(x=0\).
Nótese que para obtener una serie de Maclaurin evaluamos la función y sus derivadas en\(x=0\). Este procedimiento también se llama la expansión de la función alrededor (o alrededor de) cero. Podemos expandir funciones alrededor de otros números, y estas series se llaman series Taylor (ver Sección 3).
Ejemplo\(\PageIndex{1}\)
Obtener la serie Maclaurin de\(sin(x)\).
Solución
Necesitamos obtener todos los coeficientes (\(a_0, a_1...etc\)). Debido a que hay infinitamente muchos coeficientes, calcularemos algunos y encontraremos un patrón general para expresar el resto. Vamos a necesitar varias derivadas de\(sin(x)\), así que hagamos una tabla:
| \(n\) | \(\dfrac{d^n f(x)}{dx^n}\) | \(\left( \dfrac{d^n f(x)}{dx^n} \right)_0\) |
|---|---|---|
| \ (n\)” style="text-align:center; ">0 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(\sin (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">1 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(\cos (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">1 |
| \ (n\)” style="text-align:center; ">2 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(-\sin (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">3 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(-\cos (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">-1 |
| \ (n\)” style="text-align:center; ">4 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(\sin (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">5 | \ (\ dfrac {d^n f (x)} {dx^n}\)” style="text-align:center; ">\(\cos (x)\) | \ (\ izquierda (\ dfrac {d^n f (x)} {dx^n}\ derecha) _0\)” style="text-align:center; ">1 |
Recuerde que cada coeficiente es igual\(\left( \dfrac{d^n f(x)}{dx^n} \right)_0\) dividido por\(n!\), por lo tanto:
| \(n\) | \(n!\) | \(a_n\) |
|---|---|---|
| \ (n\)” style="text-align:center; ">0 | \ (n! \)” style="text-align:center; ">1 | \ (a_n\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">1 | \ (n! \)” style="text-align:center; ">1 | \ (a_n\)” style="text-align:center; ">1 |
| \ (n\)” style="text-align:center; ">2 | \ (n! \)” style="text-align:center; ">2 | \ (a_n\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">3 | \ (n! \)” style="text-align:center; ">\(6\) | \ (a_n\)” style="text-align:center; ">\(-\dfrac{1}{6}\) |
| \ (n\)” style="text-align:center; ">4 | \ (n! \)” style="text-align:center; ">\(24\) | \ (a_n\)” style="text-align:center; ">0 |
| \ (n\)” style="text-align:center; ">5 | \ (n! \)” style="text-align:center; ">\(120\) | \ (a_n\)” style="text-align:center; ">\(\dfrac{1}{120}\) |
Esta es suficiente información para ver el patrón (puedes ir a valores más altos de\(n\) si aún no lo ves):
- los coeficientes para valores pares de\(n\) igual cero.
- los coeficientes para\(n = 1, 5, 9, 13,...\) igual\(1/n!\)
- los coeficientes para\(n = 3, 7, 11, 15,...\) igual\(-1/n!\).
Recordemos que la expresión general para una serie de Maclaurin es\(a_0+a_1 x + a_2 x^2...a_n x^n\), y sustituirla\(a_0...a_n\) por los coeficientes que acabamos de encontrar:
\[\displaystyle{\color{Maroon}\sin (x) = x - \dfrac{1}{3!} x^3+ \dfrac{1}{5!} x^5 -\dfrac{1}{7!} x^7...} \nonumber\]
Esta es una forma correcta de escribir la serie, pero en el siguiente ejemplo veremos cómo escribirla de manera más elegante como suma.
Ejemplo\(\PageIndex{2}\)
Expresa la serie Maclaurin de\(\sin (x)\) como suma.
Solución
En el ejemplo anterior encontramos que:
\[\label{series:sin}\sin (x) = x - \dfrac{1}{3!} x^3+ \dfrac{1}{5!} x^5 -\dfrac{1}{7!} x^7...\]
Queremos expresar esto como una suma:
\[\displaystyle\sum_{n=0}^{\infty}a_n x^{n} \nonumber\]
La clave aquí es expresar los coeficientes\(a_n\) en términos de\(n\). Acabamos de concluir que 1) los coeficientes para valores pares de\(n\) igual cero, 2) los coeficientes para\(n = 1, 5, 9, 13,...\) iguales\(1/n!\) y 3) los coeficientes para\(n = 3, 7, 11,...\) iguales\(-1/n!\). ¿Cómo juntamos toda esta información en una expresión única? Aquí hay tres respuestas posibles (e igualmente buenas):
- \(\displaystyle{\color{Maroon}\sin (x)=\displaystyle\sum_{n=0}^{\infty} \left( -1 \right) ^n \dfrac{1}{(2n+1)!} x^{2n+1}}\)
- \(\displaystyle{\color{Maroon}\sin (x)=\displaystyle\sum_{n=1}^{\infty} \left( -1 \right) ^{(n+1)} \dfrac{1}{(2n-1)!} x^{2n-1}}\)
- \(\displaystyle{\color{Maroon}\sin (x)=\displaystyle\sum_{n=0}^{\infty} cos(n \pi) \dfrac{1}{(2n+1)!} x^{2n+1}}\)
Esto puede parecer imposiblemente difícil de entender, pero permítame compartir algunos trucos contigo. Primero, notamos que el signo en Ecuación\ ref {series:sin} alterna, comenzando con un “+”. Una forma matemática de hacer esto es con un término\((-1)^n\) si tu suma comienza con\(n=0\), o\((-1)^{(n+1)}\) si tu suma comienza con\(n=1\). Tenga en cuenta que\(\cos (n \pi)\) hace el mismo truco.
| \(n\) | \((-1)^n\) | \((-1)^{n+1}\) | \(\cos (n \pi)\) |
|---|---|---|---|
| \ (n\)” style="text-align:center; ">0 | \ ((-1) ^n\)” style="text-align:center; ">1 | \ ((-1) ^ {n+1}\)” style="text-align:center; ">-1 | \ (\ cos (n\ pi)\)” style="text-align:center; ">1 |
| \ (n\)” style="text-align:center; ">1 | \ ((-1) ^n\)” style="text-align:center; ">-1 | \ ((-1) ^ {n+1}\)” style="text-align:center; ">1 | \ (\ cos (n\ pi)\)” style="text-align:center; ">-1 |
| \ (n\)” style="text-align:center; ">2 | \ ((-1) ^n\)” style="text-align:center; ">1 | \ ((-1) ^ {n+1}\)” style="text-align:center; ">-1 | \ (\ cos (n\ pi)\)” style="text-align:center; ">1 |
| \ (n\)” style="text-align:center; ">3 | \ ((-1) ^n\)” style="text-align:center; ">-1 | \ ((-1) ^ {n+1}\)” style="text-align:center; ">1 | \ (\ cos (n\ pi)\)” style="text-align:center; ">-1 |
Tenemos el signo correcto para cada término, pero necesitamos generar los números\(1, \dfrac{1}{3!}, \dfrac{1}{5!}, \dfrac{1}{7!},...\) Aviso que el número “1” se puede expresar como\(\dfrac{1}{1!}\). Para ello, te presentamos el segundo truco del día: usaremos la expresión\(2n+1\) para generar números impares (si comienzas tu suma con\(n=0\)) o\(2n-1\) (si empiezas en\(n=1\)). Por lo tanto, la expresión\(\dfrac{1}{(2n+1)!}\) da\(1, \dfrac{1}{3!}, \dfrac{1}{5!}, \dfrac{1}{7!},...\), que es lo que necesitamos en el primer y tercer ejemplo (cuando la suma empieza en cero).
Por último, necesitamos utilizar sólo los poderes impares de\(x\). La expresión\(x^{(2n+1)}\) genera los términos\(x, x^3, x^5...\) cuando comienzas en\(n=0\), y\(x^{(2n-1)}\) logra lo mismo cuando comienzas tu serie en\(n=1\).
¿Confundido acerca de escribir sumas usando el operador de suma\((\sum)\)? Este video ayudará a: http://tinyurl.com/lvwd36q
¿Necesitas ayuda? Los enlaces a continuación contienen ejemplos resueltos.
Enlaces externos:
Encontrar la serie maclaurin de una función I: http://patrickjmt.com/taylor-and-maclaurin-series-example-1/
Encontrar la serie maclaurin de una función II: http://www.youtube.com/watch?v = Dp2OVDuwhro
Encontrar la serie maclaurin de una función III: http://www.youtube.com/watch?v = wWe7pZjC4s8
Representación Gráfica
A partir de la ecuación\(\ref{eq3}\) y los ejemplos que discutimos anteriormente, debe quedar claro en este punto que cualquier función cuyas derivadas sean finitas en se\(x=0\) puede expresar usando el mismo conjunto de funciones: los poderes de\(x\). Llamaremos a estas funciones el conjunto de bases. Un conjunto de bases es una colección de funciones linealmente independientes que pueden representar otras funciones cuando se usan en una combinación lineal.
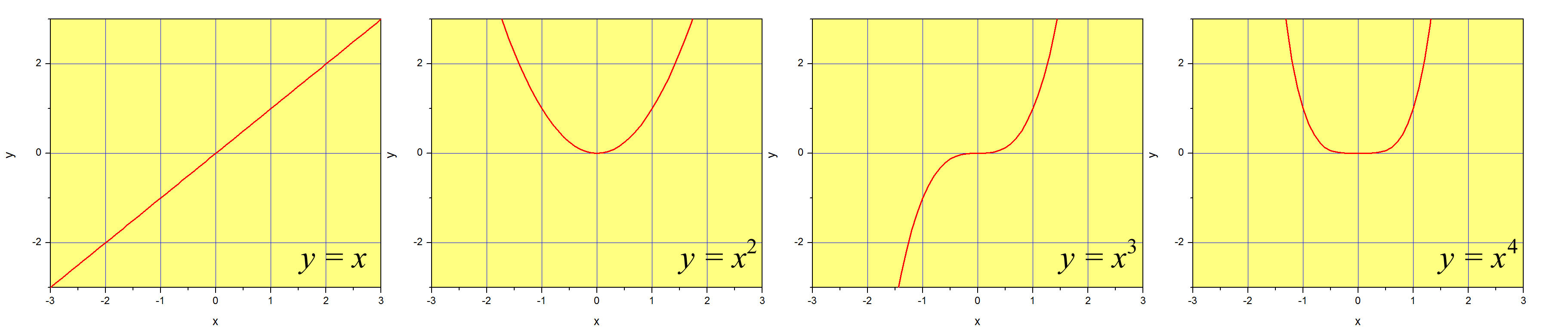
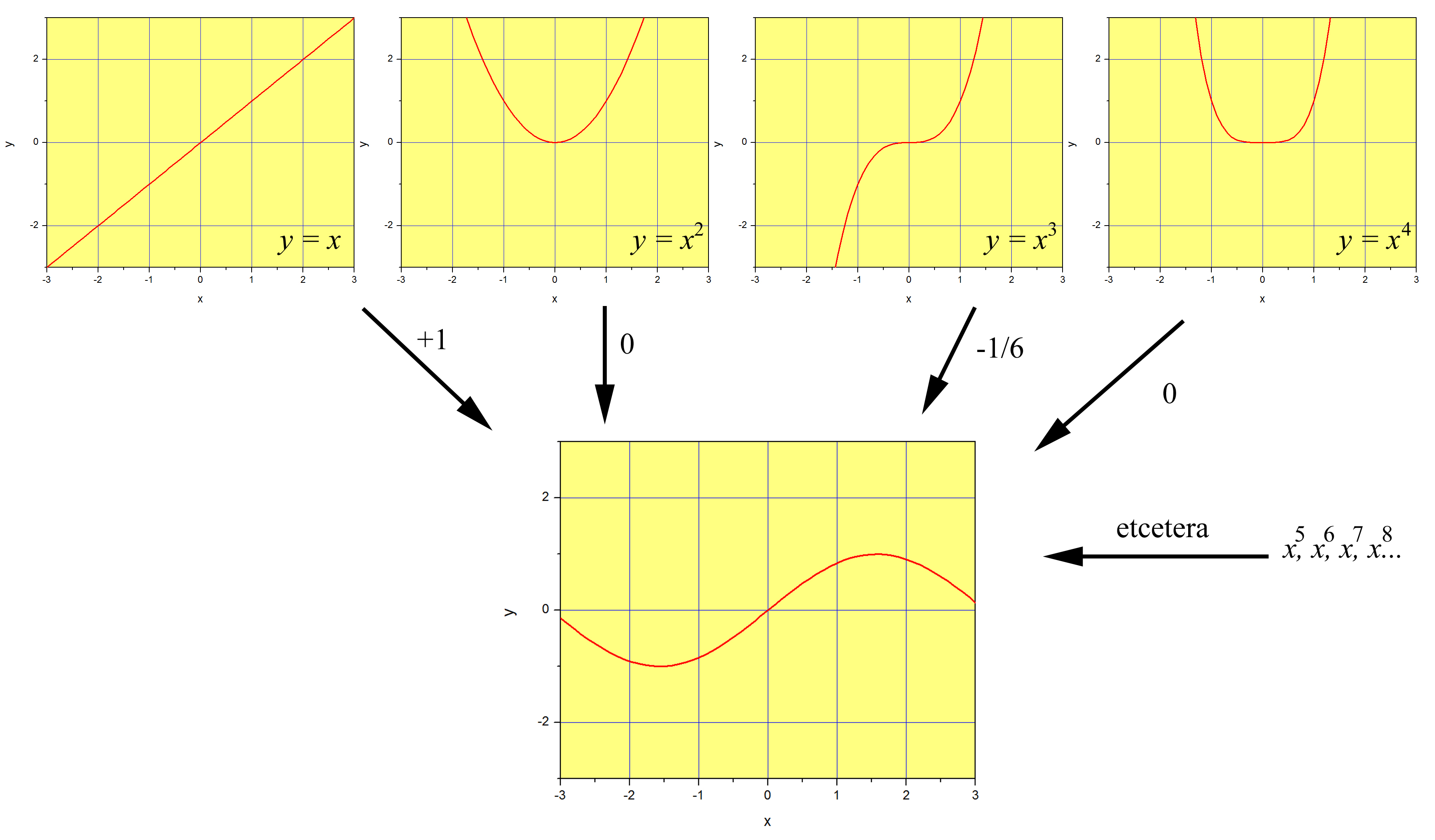
La figura\(\PageIndex{1}\) es una representación gráfica de las cuatro primeras funciones de este conjunto básico. Para ser justos, la primera función del conjunto es\(x^0=1\), por lo que estas serían la segunda, tercera, cuarta y quinta. El conjunto completo de bases es, por supuesto, infinito en longitud. Si mezclamos todas las funciones del conjunto con pesos iguales (ponemos la misma cantidad de\(x^2\) lo que ponemos\(x^{245}\) o\(x^{0}\)), obtenemos\((1-x)^{-1}\) (Ecuación\ ref {eq1}. Si usamos solo los términos impares, alternamos el signo comenzando con un '+', y pesamos cada término cada vez menos usando la expresión\(1/(2n-1)!\) para el\(n-th\) término, obtenemos\(\sin{x}\) (Ecuación\ ref {series:sin}). Esto se ilustra en la Figura\(\PageIndex{2}\), donde multiplicamos las potencias pares de\(x\) por cero, y usamos diferentes pesos para el resto. Tenga en cuenta que lo 'etcétera' es crucial, ya que necesitaríamos incluir un número infinito de funciones para obtener la función\(\sin{x}\) exactamente.
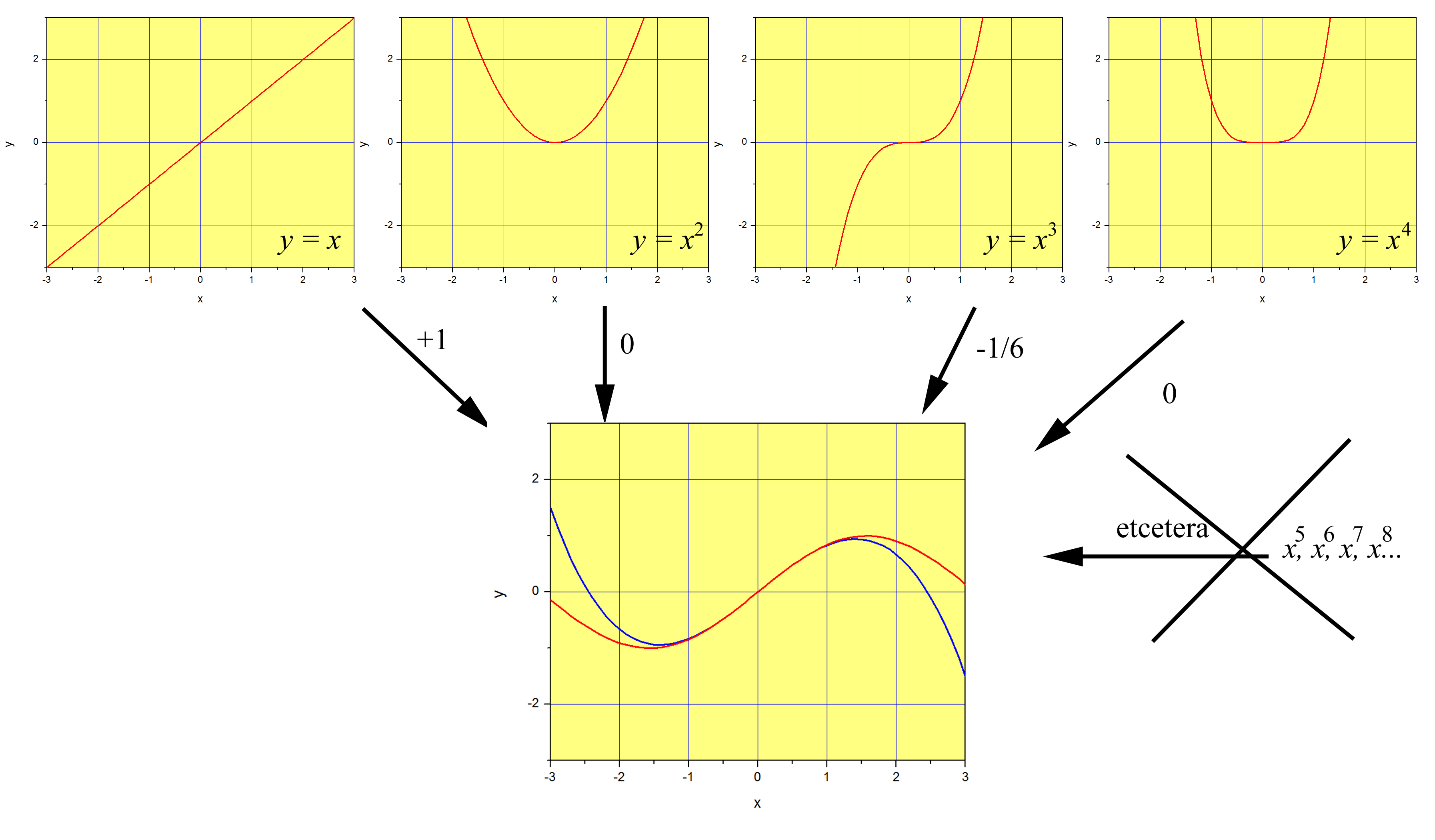
Aunque necesitamos un número infinito de términos para expresar una función exactamente (a menos que la función sea un polinomio, por supuesto), en muchos casos observaremos que el peso (el coeficiente) de cada potencia de\(x\) se hace cada vez más pequeño a medida que aumentamos la potencia. Por ejemplo, en el caso de\(\sin{x}\), la contribución de\(x^3\) es\(1/6 th\) de la contribución de\(x\) (en términos absolutos), y la contribución de\(x^5\) es\(1/120 th\). Esto te dice que los primeros términos son mucho más importantes que el resto, aunque todos son necesarios si queremos que la suma represente\(\sin{x}\) exactamente. ¿Y si estamos contentos con una aproximación 'bastante buena' de\(\sin{x}\)? Veamos qué pasa si usamos hasta\(x^3\) y bajamos los términos más altos. El resultado se grafica en azul en la Figura\(\PageIndex{3}\) junto con\(\sin{x}\) en rojo. Podemos ver que la función\(x-1/6 x^3\) es una muy buena aproximación de\(\sin{x}\) mientras nos mantengamos cerca de\(x=0\). A medida que nos alejamos del origen la aproximación empeora y empeora, y necesitaríamos incluir potencias superiores de\(x\) para mejorarla. Esto debería quedar claro a partir de la eq. [series:sin], ya que los términos se\(x^n\) hacen cada vez más pequeños con el aumento\(n\) si\(x\) es un número pequeño. Por lo tanto, si\(x\) es pequeño, podríamos escribir\(\sin (x) \approx x - \dfrac{1}{3!} x^3\), donde el símbolo\(\approx\) significa aproximadamente igual.
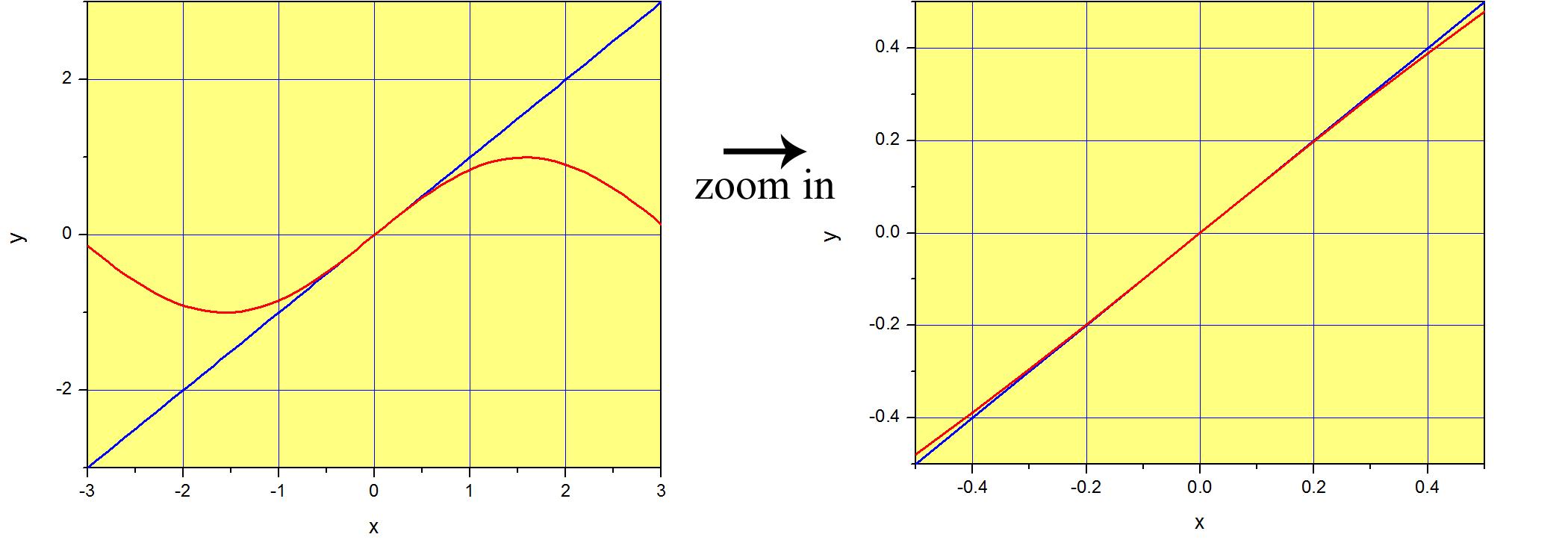
Pero, ¿por qué detenerse en\(n=3\) y no\(n=1\) o 5? El argumento anterior sugiere que la función\(x\) podría ser una buena aproximación de\(\sin{x}\) alrededor\(x=0\), cuando el término\(x^3\) es mucho menor que el término\(x\). De hecho, este es el caso, como se muestra en la Figura\(\PageIndex{4}\).
Hemos visto que podemos obtener buenas aproximaciones de una función truncando la serie (es decir, no usando los términos infinitos). Los estudiantes suelen sentirse frustrados y quieren saber cuántos términos son 'correctos'. Se necesita un poco de práctica para darse cuenta de que no hay una respuesta universal a esta pregunta. Necesitaríamos algún contexto para analizar qué tan buena aproximación estamos contentos con. Por ejemplo, ¿estamos satisfechos con el pequeño error que vemos\(x= 0.5\) en la Figura\(\PageIndex{4}\)? Todo depende del contexto. A lo mejor estamos realizando experimentos donde tenemos otras fuentes de error que son mucho peores que esto, por lo que usar un término extra no mejorará la situación general de todos modos. A lo mejor estamos realizando experimentos muy precisos donde esta diferencia es significativa. Como ve, discutir cuántos términos se necesitan en una aproximación fuera de contexto no es muy útil. Discutiremos esta aproximación particular cuando aprendamos sobre ecuaciones diferenciales de segundo orden y analicemos el problema del péndulo, así que ojalá las cosas tengan más sentido entonces.
Aproximaciones Lineales
Si echas un vistazo a Ecuación\(3.1.5\) verás que siempre podemos aproximar una función\(a_0+a_1x\) siempre y cuando\(x\) sea pequeña. Cuando decimos 'cualquier función', por supuesto, implicamos que la función y todas sus derivadas necesitan ser finitas en\(x=0\). Mirando las definiciones de los coeficientes, podemos escribir:
\[\label{eq1} f (x) \approx f(0) +f'(0)x\]
Llamamos a esto una aproximación lineal porque la Ecuación\ ref {eq1} es la ecuación de una línea recta. La pendiente de esta línea es\(f'(0)\) y la\(y\) -intercepción es\(f(0)\).
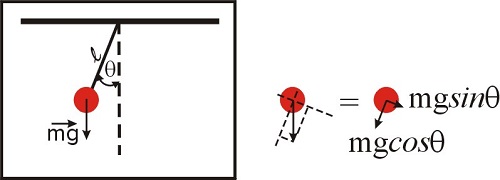
Una pregunta justa en este punto es '¿por qué estamos hablando siquiera de aproximaciones?' ¿Qué tiene de complicado las funciones\(\sin{x}\),\(e^x\) o\(\ln{(x+1)}\) que necesitamos buscar una aproximación? ¿Nos estamos volviendo demasiado perezosos? Para ilustrar este tema, consideremos el problema del péndulo, que resolveremos en detalle en el capítulo dedicado a las ecuaciones diferenciales. El problema se ilustra en Figura\(\PageIndex{1}\), y aquellos de ustedes que tomaron un curso de física reconocerán la siguiente ecuación, que representa la ley del movimiento de un simple péndulo. La segunda derivada se refiere a la aceleración, y el\(\sin \theta\) término se debe a la componente de la fuerza neta a lo largo de la dirección del movimiento. Esto lo discutiremos con más detalle más adelante en este semestre, así que por ahora solo acepta el hecho de que, para este sistema, la ley de Newton puede escribirse como:
\[\frac{d^2\theta(t)}{dt^2}+\frac{g}{l} \sin{\theta(t)}=0 \nonumber\]
Esta ecuación debería ser fácil de resolver, ¿verdad? Tiene sólo unos pocos términos, nada demasiado elegante que no sea una función sinusoidal inocente... ¿Qué tan difícil puede ser de obtener\(\theta(t)\)? Desafortunadamente, ¡esta ecuación diferencial no tiene una solución analítica! Una solución analítica significa que la solución puede expresarse en términos de un número finito de funciones elementales (como seno, coseno, exponenciales, etc.). Las ecuaciones diferenciales a veces engañan de esta manera: se ven simples, pero pueden ser increíblemente difíciles de resolver, ¡o incluso imposibles! El hecho de que no podamos anotar una solución analítica no significa que no haya solución al problema. Puedes balancear un péndulo\(\theta(t)\) y medir y crear una tabla de números, y en principio puedes ser tan preciso como quieras ser. Sin embargo, no podrás crear una función que refleje tus resultados numéricos. Veremos que podemos resolver ecuaciones como esta numéricamente, pero no analíticamente. Decepcionante, ¿no? Bueno... no lo seas. Mucho de lo que sabemos sobre las moléculas y las reacciones químicas provino del trabajo de los químicos físicos, que saben resolver problemas mediante métodos numéricos. El hecho de que no podamos obtener una expresión analítica que describa un sistema físico o químico en particular no significa que no podamos resolver el problema numéricamente y ¡aprender mucho de todos modos!
Pero, ¿y si solo nos interesan los pequeños desplazamientos (es decir, el péndulo se balancea cerca del eje vertical en todo momento)? En este caso,\(\theta<<1\), y como vimos\(\sin{\theta}\approx\theta\) (ver Figura\(3.1.4\)). Si este es el caso, tenemos ahora:
\[\frac{d^2\theta(t)}{dt^2}+\frac{g}{l} \theta(t)=0 \nonumber\]
Como resulta, y como veremos en el Capítulo 2, en este caso es muy fácil obtener la solución que estamos buscando:
\[\theta(t)=\theta(t=0)\cos \left((\frac{g}{l})^{1/2}t \right) \nonumber\]
Esta solución es el familiar movimiento oscilatorio de ida y vuelta del péndulo con el que está familiarizado. Lo que quizás no sabías hasta hoy es que esta solución asume\(\sin{\theta}\approx\theta\) y por lo tanto es válida sólo si\(\theta<<1\)!
Hay muchas aproximaciones lineales 'ocultas' en las ecuaciones que has aprendido en tus cursos de física y química. Quizás recuerdes a tus profesores diciéndote que una ecuación de dar es válida solo a bajas concentraciones, o bajas presiones, o bajas... ojalá entiendas el punto. Un péndulo por supuesto no es particularmente interesante cuando se trata de química, pero como veremos a través de muchos ejemplos durante el semestre, las oscilaciones, en términos generales, lo son. El siguiente ejemplo ilustra el uso de series a un problema que involucra moléculas diatómicas, pero antes de discutirlo necesitamos proporcionar algunos antecedentes.
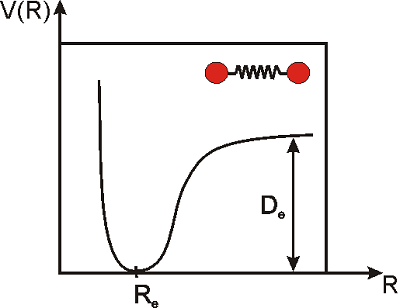
Las vibraciones de una molécula diatómica a menudo se modelan en términos del llamado potencial Morse. Esta ecuación no proporciona una descripción exacta de las vibraciones de la molécula bajo ninguna condición, pero hace un trabajo bastante bueno para muchos propósitos.
\[\label{morse}V(R)=D_e\left(1-e^{-k(R-R_e)}\right)^2\]
Aquí,\(R\) es la distancia entre los núcleos de los dos átomos,\(R_e\) es la distancia en equilibrio (es decir, la longitud del enlace de equilibrio),\(D_e\) es la energía de disociación de la molécula,\(k\) es una constante que mide la fuerza del enlace, y\(V\) es la energía potencial. Obsérvese que\(R_e\) es la distancia a la que la energía potencial es mínima, y por eso llamamos a esto la distancia de equilibrio. Tendríamos que aplicar energía para separar aún más los átomos, o para acercarlos más (Figura\(\PageIndex{2}\)).
A temperatura ambiente, hay suficiente energía térmica para inducir pequeñas vibraciones que desplazan a los átomos de sus posiciones de equilibrio, pero para moléculas estables, el desplazamiento es muy pequeño:\(R-R_e\rightarrow0\). En el siguiente ejemplo probaremos que bajo estas condiciones, el potencial parece una parábola, o en términos matemáticos,\(V(R)\) es proporcional al cuadrado del desplazamiento. Este tipo de potencial se denomina 'potencial armónico'. Se dice que una vibración es armónica simple si el potencial es proporcional al cuadrado del desplazamiento (como en los simples problemas de resorte que puede haber estudiado en física).
Ejemplo\(\PageIndex{1}\)
Expandir el potencial Morse como una serie de potencias y demostrar que las vibraciones de la molécula son aproximadamente armónicas simples si el desplazamiento\(R-R_e\) es pequeño.
Solución
La variable relevante en este problema es el desplazamiento\(R-R_e\), no la distancia real\(R\). Llamemos al desplazamiento\(R-R_e=x\), y vamos a reescribir la ecuación\ ref {morse} como
\[\label{morse2}V(R)=D_e\left(1-e^{-kx}\right)^2\]
El objetivo es demostrar que\(V(R) =cx^2\) (es decir, el potencial es proporcional al cuadrado del desplazamiento) cuándo\(x\rightarrow0\). La constante\(c\) es la constante de proporcionalidad. Podemos abordar esto de dos maneras diferentes. Una opción es expandir la función mostrada en Ecuación\ ref {morse2} alrededor de cero. Esto sería correcto, pero pero implica algún trabajo innecesario. La variable\(x\) aparece solo en el término exponencial, por lo que una opción más simple es expandir la función exponencial, y tapar el resultado de esta expansión de nuevo en la Ecuación\ ref {morse2}. Veamos cómo funciona esto:
Queremos expandirnos\(e^{-kx}\) como\(a_0+a_1 x + a_2 x^2...a_n x^n\), y sabemos que los coeficientes son\(a_n=\frac{1}{n!} \left( \frac{d^n f(x)}{dx^n} \right)_0.\)
El coeficiente\(a_0\) es\(f(0)=1\). Los tres primeros derivados de\(f(x)=e^{-kx}\) son
- \(f'(x)=-ke^{-kx}\)
- \(f''(x)=k^2e^{-kx}\)
- \(f'''(x)=-k^3e^{-kx}\)
Cuando se evalúa en\(x=0\) obtenemos,\(-k, k^2, -k^3...\)
y por lo tanto\(a_n=\frac{(-1)^n k^n}{n!}\) para\(n=0, 1, 2...\).
Por lo tanto,
\[e^{-kx}=1-kx+k^2x^2/2!-k^3x^3/3!+k^4x^4/4!...\]
y
\[1-e^{-kx}=+kx-k^2x^2/2!+k^3x^3/3!-k^4x^4/4!...\]
Desde el último resultado, cuando\(x<<1\), sabemos que los términos en\(x^2, x^3...\) serán cada vez más pequeños, así\(1-e^{-kx}\approx kx\) y\((1-e^{-kx})^2\approx k^2x^2\).
Tapando este resultado en la Ecuación\ ref {morse2} obtenemos\(V(R) \approx D_e k^2 x^2\), por lo que demostramos que el potencial es proporcional al cuadrado del desplazamiento cuando el desplazamiento es pequeño (la constante de proporcionalidad es\(D_e k^2\)). Por lo tanto, ¡las moléculas diatómicas estables a temperatura ambiente se comportan prácticamente como una primavera! (No tomes esto demasiado literalmente. Como discutiremos más adelante, los resortes microscópicos no se comportan en absoluto como resortes macroscópicos).
Serie Taylor
Antes de discutir más aplicaciones de la serie Maclaurin, ampliemos nuestra discusión al caso más general donde expandimos una función alrededor de valores diferentes a cero. Digamos que queremos expandir una función alrededor del número\(h\). Si\(h=0\), llamamos a la serie una serie de Maclaurin, y si\(h\neq0\) llamamos a la serie una serie de Taylor. Debido a que las series Maclaurin son un caso especial del caso más general, podemos llamar a todas las series series Taylor y omitir la distinción. Lo siguiente es cierto para una función\(f(x)\) siempre que la función y todas sus derivadas sean finitas en\(h\):
\[\label{taylor} f(x)=a_0 + a_1(x-h)+a_2(x-h)^2+...+a_n(x-h)^n = \displaystyle\sum_{n=0}^{\infty}a_n(x-h)^n\]
Los coeficientes se calculan como
\[\label{taylorcoeff} a_n=\frac{1}{n!}\left( \frac{d^n f}{dx^n}\right)_h\]
Observe que en lugar de evaluar la función y sus derivadas en ahora las\(x=0\) evaluamos en\(x=h\), y que el conjunto de bases es ahora\(1, (x-h), (x-h)^2,...,(x-h)^n\) en lugar de\(1, x, x^2,...,x^n\). Una serie Taylor será una buena aproximación de la función a valores\(x\) cercanos a\(h\), de la misma manera que las series Maclaurin proporcionan buenas aproximaciones cercanas a cero.
Para ver cómo funciona esto volvamos a la función exponencial. Recordemos que la expansión Maclaurin de\(e^x\) se muestra en la Ecuación\(3.1.3\). Sabemos lo que pasa si nos expandimos alrededor de cero, así que para practicar, vamos a expandirnos alrededor\(h=1\). El coeficiente\(a_0\) es\(f(1)= e^1=e\). Todos los derivados son\(e^x\), por lo\(f'(1)=f''(1)=f'''(1)...=e.\) tanto,\(a_n=\frac{e}{n!}\) y la serie es por lo tanto
\[\label{taylorexp} e\left[ 1+(x-1)+\frac{1}{2}(x-1)^2+\frac{1}{6}(x-1)^3+... \right]=\displaystyle\sum_{n=0}^{\infty}\frac{e}{n!}(x-1)^n\]
Podemos usar los mismos argumentos que usamos antes para concluir que\(e^x\approx ex\) si\(x\approx 1\). Si\(x\approx 1\),\((x-1)\approx 0\), y los términos\((x-1)^2, (x-1)^3\) serán cada vez más pequeños y contribuirán cada vez menos a la suma. Por lo tanto,
\[e^x \approx e \left[ 1+(x-1) \right]=ex.\]
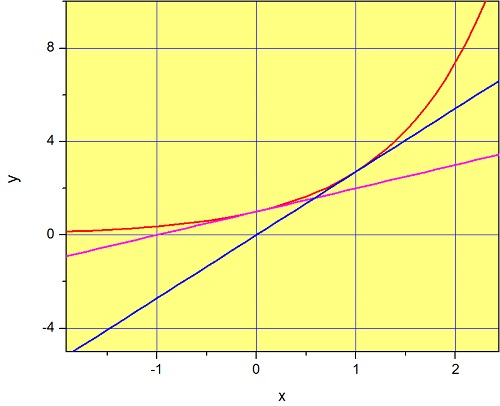
Esta es la ecuación de una línea recta con pendiente\(e\) e\(y\) -intercepción 0. De hecho, a partir de Ecuación\(3.1.7\) podemos ver que todas las funciones mirarán lineales a valores cercanos a\(h\). Esto se ilustra en la Figura\(\PageIndex{1}\), que muestra la función exponencial (rojo) junto con las funciones\(1+x\) (magenta) y\(ex\) (azul). No es sorprendente que la función\(1+x\) proporcione una buena aproximación de\(e^x\) a valores cercanos a cero (ver Ecuación\(3.1.3\)) y la función\(ex\) proporciona una buena aproximación alrededor\(x=1\) (Ecuación\ ref {taylorexp}).
Ejemplo\(\PageIndex{1}\):
Ampliar\(f(x)=\ln{x}\) sobre\(x=1\)
Solución
\[f(x)=a_0 + a_1(x-h)+a_2(x-h)^2+...+a_n(x-h)^n, a_n=\frac{1}{n!}\left( \frac{d^n f}{dx^n}\right)_h \nonumber\]
\[a_0=f(1)=\ln(1)=0 \nonumber\]
Los derivados de\(\ln{x}\) son:
\[f'(x) = 1/x, f''(x)=-1/x^2, f'''(x) = 2/x^3, f^{(4)}(x)=-6/x^4, f^{(5)}(x)=24/x^5... \nonumber\]
y por lo tanto,
\[f'(1) = 1, f''(1)=-1, f'''(1) = 2, f^{(4)}(1)=-6, f^{(5)}(1)=24.... \nonumber\]
Para calcular los coeficientes, necesitamos dividir por\(n!\):
- \(a_1=f'(1)/1!=1\)
- \(a_2=f''(1)/2!=-1/2\)
- \(a_3=f'''(1)/3!=2/3!=1/3\)
- \(a_4=f^{(4)}(1)/4!=-6/4!=-1/4\)
- \(a_n=(-1)^{n+1}/n\)
Por lo tanto, la serie es:
\[f(x)=0 + 1(x-1)-1/2 (x-1)^2+1/3 (x-1)^3...=\displaystyle{\color{Maroon}\displaystyle\sum_{n=1}^{\infty} \frac{(-1)^{n+1}}{n}(x-1)^{n}} \nonumber\]
Tenga en cuenta que iniciamos la suma en\(n=1\) porque\(a_0=0\), por lo que el término para\(n=0\) no tiene ninguna contribución.
¿Necesitas ayuda? Los enlaces a continuación contienen ejemplos resueltos.
Enlaces externos:
Encontrar la serie Taylor de una función I: http://patrickjmt.com/taylor-and-maclaurin-series-example-2/
Otras aplicaciones de las series Mclaurin y Taylor
Hasta ahora hemos discutido cómo podemos usar series de potencia para aproximar funciones más complejas alrededor de un valor particular. Esto es muy común en química física, y lo vas a aplicar frecuentemente en futuros cursos. Existen otras aplicaciones útiles de la serie Taylor en las ciencias físicas. A veces, podemos usar relaciones para derivar ecuaciones o probar relaciones. Ejemplo\(\PageIndex{1}\) ilustra este último punto.
Ejemplo\(\PageIndex{1}\)
Calcular la siguiente suma (\(\lambda\)es una constante positiva)
\[\displaystyle\sum_{k=0}^{\infty}\frac{\lambda^k e^{-\lambda}}{k!} \nonumber\]
Solución
Vamos a 'deletrear' la suma:
\[\displaystyle\sum_{k=0}^{\infty}\frac{\lambda^k e^{-\lambda}}{k!}=e^{-\lambda} \left[1+\frac{\lambda^1}{1!}+\frac{\lambda^2}{2!}+\frac{\lambda^3}{3!}...\right] \nonumber \]
La suma entre paréntesis es exactamente\(e^\lambda\). Esto es exacto, y no una aproximación, porque todos tenemos términos infinitos.
Por lo tanto,
\[ \sum_{k=0}^{\infty}\frac{\lambda^k e^{-\lambda}}{k!}=e^{-\lambda}e^\lambda=1 \nonumber \]
Esto requeriría que reconozcas el término entre paréntesis como la serie Maclaurin de la función exponencial. Una versión más sencilla del problema sería pedirle que demuestre que la suma es igual a 1.
Hay más formas en las que podemos usar la serie Taylor en las ciencias físicas. Veremos otro tipo de aplicación cuando estudiemos ecuaciones diferenciales. De hecho, las series de poder son sumamente importantes para encontrar las soluciones de un gran número de ecuaciones que surgen en la mecánica cuántica. La descripción de los orbitales atómicos, por ejemplo, requiere que resolvamos ecuaciones diferenciales que implican expresar funciones como series de potencia.