
19.9: Apéndice - Cálculo Integral Vectorial
- Page ID
- 126675
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Las ecuaciones de campo, como para los campos electromagnéticos y gravitacionales, requieren tanto integrales de línea como integrales superficiales, de campos vectoriales para evaluar el potencial, el flujo y la circulación. Estos requieren el uso del gradiente, el Teorema de Divergencia y el Teorema de Stokes que se discuten en las siguientes secciones.
Integral de línea del gradiente de un campo escalar
El cambio\(\Delta V\) en un campo escalar para un paso infinitossimal\(d\mathbf{l}\) a lo largo de un camino se puede escribir como
\[\Delta V = (\boldsymbol{\nabla}V ) \cdot d\mathbf{l} \label{H.1}\]
ya que el gradiente de\(V\), es decir,\(\boldsymbol{\nabla}V\), es la tasa de cambio de\(V\) con\(d\mathbf{l}\). Las discusiones sobre el potencial gravitacional y electrostático muestran que la línea integral entre puntos\(a\) y\(b\) se da en términos del operador por
\[V_b − V_a = \int^b_a (\boldsymbol{\nabla}V ) \cdot d\mathbf{l} \label{H.2}\]
Esto relaciona la diferencia en valores de un campo escalar en dos puntos con la integral de línea del producto de punto del gradiente con el elemento de la integral de línea.
Teorema de Divergencia
Flujo de un campo vectorial para la superficie gaussiana
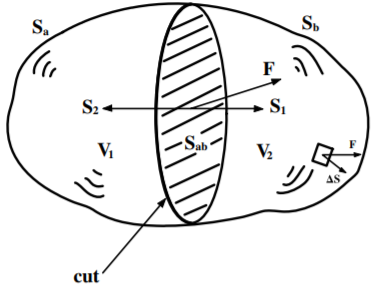
Considere el flujo\(\Phi \) de un campo vectorial\(\mathbf{F}\) para una superficie cerrada, generalmente llamada superficie gaussiana, que\(S\) se muestra en la Figura\(\PageIndex{1}\).
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} \label{H.3}\]
Si el volumen cerrado se corta en dos piezas encerradas por superficies\(S_1 = S_a + S_{ab}\) y\(S_2 = S_b + S_{ab}\). El flujo a través de la superficie\(S_{ab}\) común a ambos\(S_1\) y\(S_2\) son iguales y en la misma dirección. Entonces el flujo neto a través de la suma de\(S_1\) y\(S_2\) está dado por
\[\oint_{S_1} \mathbf{F} \cdot d\mathbf{S} + \oint_{S_2} \mathbf{F} \cdot d\mathbf{S} = \oint_S \mathbf{F} \cdot d\mathbf{S} \label{H.4}\]
ya que las contribuciones de la superficie común se\(S_{ab}\) cancelan en que el flujo que sale de\(S_1\) es igual y opuesto al flujo que entra\(S_2\) sobre la superficie\(S_{ab}\). Es decir, independientemente de cuántas veces\(S\) se subdivida el volumen encerrado por, el flujo neto para la suma de todas las superficies gaussianas que encierran estas subdivisiones del volumen, sigue siendo igual\(\oint_S \mathbf{F} \cdot d\mathbf{S}\).
Considera que el volumen encerrado por\(S\) se subdivide en\(N\) subdivisiones donde\(N \rightarrow \infty\), entonces aunque\(\oint_{S_i} \mathbf{F} \cdot d\mathbf{S} \rightarrow 0\) as\(N \rightarrow \infty\), la suma sobre superficies de todos los volúmenes infinitossimales permanece sin cambios
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} = \sum^{N \rightarrow \infty}_i \oint_{S_i} \mathbf{F} \cdot d\mathbf{S} \label{H.5}\]
Así podemos tomar el límite de una suma de un número infinito de volúmenes infinitossimales según sea necesario para obtener una forma diferencial. La integral de superficie para cada infinitosvolumen simal será igual a cero lo que no es útil, es decir\(\oint_{S_i} \mathbf{F} \cdot d\mathbf{S} \rightarrow 0\) como\(N \rightarrow \infty \). Sin embargo, el flujo por unidad de volumen tiene un valor finito como\(N \rightarrow \infty \). Esta relación se llama la divergencia del campo vectorial;
\[div \mathbf{F} = Lim_{\Delta \tau_i \rightarrow 0} \frac{\oint_{S_i} \mathbf{F} \cdot d\mathbf{S}}{ \Delta \tau_i} \label{H.6}\]
donde\(\Delta \tau_i\) está el volumen infinitossimal encerrado por la superficie\(S_i\). La divergencia del campo vectorial es una cantidad escalar.
Así, la suma del flujo sobre todas las subdivisiones infinitassimales del volumen encerrado por una superficie cerrada\(S\) es igual a
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} = \sum^{N \rightarrow \infty}_i \frac{\oint_{S_i} \mathbf{F} \cdot d\mathbf{S}}{ \Delta \tau_i} \Delta \tau_i = \sum^{N \rightarrow \infty}_i div \mathbf{F}\Delta \tau_i \label{H.7}\]
En el límite\(N \rightarrow \infty\),\(\Delta \tau_i \rightarrow 0\), esto se convierte en el integral;
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} = \int_{Enclosed \ volume} div \mathbf{F} d\tau \label{H.8}\]
Esto se llama Teorema de la Divergencia o Teorema de Gauss. Para evitar confusiones con la ley de Gauss en electrostática, se le denominará el teorema de la Divergencia.
Divergencia en Coordenadas Cartesianas
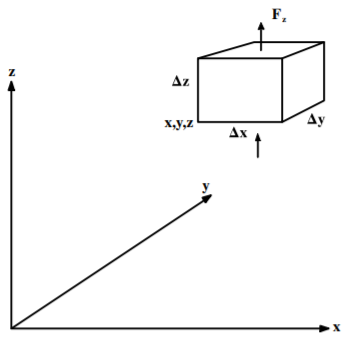
Considera el caso especial de una caja rectangular infinitossimal, tamaño que\(\Delta x, \Delta y, \Delta z\) se muestra en la Figura\(\PageIndex{2}\). Considere el flujo neto para el\(z\) componente\(F_z\) que ingresa a la superficie\(\Delta x\Delta y\) en la ubicación\((x, y, z)\).
\[\Delta \Phi ^{in}_z = \left( F_z + \frac{\Delta x}{ 2} \frac{\partial F_z}{ \partial x} + \frac{\Delta y}{ 2} \frac{\partial F_z }{\partial y} \right) \Delta x\Delta y \label{H.9}\]
El flujo neto del\(z\) componente fuera de la superficie en\(z + \Delta z\) es
\[\Delta \Phi ^{out}_z = \left( F_z + \Delta z \frac{\partial F_z}{ \partial z} + \frac{\Delta x}{2} \frac{\partial F_z}{ \partial x} + \frac{\Delta y}{ 2} \frac{\partial F_z}{ \partial y} \right) \Delta x\Delta y \label{H.10}\]
Por lo tanto, el flujo neto fuera de la caja debido al componente z de F es
\[\Delta \Phi _z = \Delta \Phi ^{out}_z − \Delta \Phi ^{in}_z = \frac{\partial F_z}{ \partial z} \Delta x\Delta y\Delta z \label{H.11}\]
Agregar los similares\(x\) y\(y\) componentes para\(\Delta \Phi \) da
\[\Delta \Phi = \left(\frac{\partial F_x}{ \partial x} + \frac{\partial F_y }{\partial y} + \frac{\partial F_z }{\partial z} \right) \Delta x\Delta y\Delta z \label{H.12}\]
Esto da que la divergencia del campo vectorial\(\mathbf{F}\) es
\[div \mathbf{F} = Lim_{\Delta \tau_i \rightarrow 0} \frac{\oint_{S_i} \mathbf{F} \cdot d\mathbf{S}}{ \Delta \tau_i} = \left(\frac{\partial F_x }{\partial x} + \frac{\partial F_y}{ \partial y} + \frac{\partial F_z}{ \partial z} \right) \label{H.13}\]
ya que\(\Delta \tau = \Delta x\Delta y\Delta z\). Pero el lado derecho de la ecuación es igual al producto escalar\(\boldsymbol{\nabla} \cdot \mathbf{F}\), es decir,
\[div \mathbf{F} = \boldsymbol{\nabla} \cdot \mathbf{F} \label{H.14}\]
La divergencia es una cantidad escalar. El significado físico de la divergencia es que da el flujo neto por unidad de volumen que fluye fuera de un volumen infinitossimal. Una divergencia positiva corresponde a una salida neta de flujo desde el volumen infinitossimal en cualquier ubicación, mientras que una divergencia negativa implica una entrada neta de flujo a este volumen infinitesimal.
Se demostró que para una caja rectangular infinitossimal
\[\Delta \Phi = \left(\frac{\partial F_x }{\partial x} + \frac{\partial F_y}{ \partial y} + \frac{\partial F_z}{ \partial z} \right) \Delta x\Delta y\Delta z = \boldsymbol{\nabla} \cdot \mathbf{F}\Delta \tau \label{H.15}\]
La integración sobre el volumen finito encerrado por la superficie\(S\) da
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} = \int\limits_{Enclosed \\ volume} \boldsymbol{\nabla} \cdot \mathbf{F} d \tau \label{H.16}\]
Esta es otra forma de expresar el teorema de la Divergencia
\[\Phi = \oint_S \mathbf{F} \cdot d\mathbf{S} = \int\limits_{Enclosed \\ volume} div \mathbf{F} d \tau \label{H.17}\]
El teorema de divergencia, desarrollado por Gauss, es de considerable importancia, relaciona la integral superficial de un campo vectorial, es decir, el flujo saliente, con una integral de volumen de\(\boldsymbol{\nabla} \cdot \mathbf{F}\) sobre el volumen cerrado.
Ejemplo\(\PageIndex{1}\): Maxwell's Flux Equations
Como ejemplo de la utilidad de esta relación, considere la ley de Gauss para el flujo en las ecuaciones de Maxwell.
Ley de Gauss para el campo eléctrico
\[\Phi _E = \oint_{Closed \ surface} E \cdot dS = \frac{1}{ \varepsilon_0} \int_{enclosed \ volume} \rho d\tau \nonumber\]
Pero la relación de divergencia da que
\[\Phi _E = \oint_S \mathbf{E} \cdot d\mathbf{S} = \int_{Enclosed \ volume} \boldsymbol{\nabla} \cdot \mathbf{E} d \tau \nonumber\]
Combinando estos da
\[\oint_{Closed \ surface} \mathbf{E} \cdot d\mathbf{S} = \int_{Enclosed \ volume} \boldsymbol{\nabla} \cdot \mathbf{E} d \tau = \frac{1}{ \varepsilon_0} \int_{enclosed \ volume} \rho d \tau \nonumber\]
Esto es cierto independientemente de la forma de la superficie o volumen cerrado, lo que lleva a la forma diferencial de la primera ley de Maxwell, es decir, la ley de Gauss para el campo eléctrico.
\[\boldsymbol{\nabla} \cdot E = \frac{\rho}{ \varepsilon_0} \nonumber\]
La forma diferencial de la ley de Gauss se\(\boldsymbol{\nabla} \cdot \mathbf{E}\) relaciona con la densidad de carga\(\rho\) en esa misma ubicación. Esto es mucho más fácil de evaluar que una integral de superficie y volumen requerida usando la forma integral de la ley de Gauss.
Ley de Gauss para el magnetismo
\[\Phi _B = \oint_{Closed \ surface} \mathbf{B} \cdot d\mathbf{S} = 0 \nonumber\]
El uso del teorema de la divergencia da que
\[\Phi _B = \oint_{Closed \ surface} \mathbf{B} \cdot d\mathbf{S} = \int_{Enclosed \ volume} \boldsymbol{\nabla} \cdot \mathbf{B} d \tau = 0 \nonumber\]
Esto es cierto independientemente de la forma de la superficie gaussiana que conduce a la forma diferencial de la ley de Gauss para\(\mathbf{B}\)
\[\boldsymbol{\nabla} \cdot \mathbf{B} = 0 \nonumber\]
Es decir, el valor local de la divergencia de\(\mathbf{B}\) es cero en todas partes.
Ejemplo\(\PageIndex{2}\): Buoyancy forces in fluids
La flotabilidad en fluidos proporciona un ejemplo del uso del flujo en la física. Considera un fluido de densidad\(\rho (z)\) en un campo gravitacional\(\bar{g}(z) = −g(z)\hat{z}\) donde el\(z\) eje apunta en dirección opuesta a la fuerza gravitacional. La presión es igual a la fuerza por unidad de área y es una cantidad escalar. Para un sistema de fluidos conservador, en equilibrio estático, el trabajo neto realizado por unidad de área para un desplazamiento infinitossimal\(d r\) es cero. La fuerza neta de presión por unidad de área es la diferencia\(P(r+ d r)−P(r) = \nabla P \cdot d r\) mientras que el cambio neto en la energía potencial gravitacional es\(\rho (z)\bar{g}(z) \cdot d r\). Así, la conservación de energía da
\[[\boldsymbol{\nabla}P + \rho (z)\bar{\mathbf{g}}(\mathbf{z})] \cdot d \mathbf{r} =0 \nonumber\]
que se puede ampliar como
\[\frac{d P}{ d z} = −\rho (z)g(z) \label{A} \\ \frac{d P}{ d x} = \frac{d P}{ d y} = 0 \tag{A}\]
Integrar las fuerzas netas normales a la superficie sobre cualquier superficie cerrada que encierra un volumen vacío, dentro del fluido, proporciona una fuerza neta de flotabilidad sobre este volumen que simplifica usando el teorema de Divergencia
\[\oint \mathbf{F} \cdot d\mathbf{S}= \oint P d\hat{\mathbf{S}} \cdot d\mathbf{S} = \oint P d S = \int_{Enclosed \ vol} \left( \frac{d P}{ d x} + \frac{d P}{ d y} + \frac{d P}{ d z} \right) d \tau \nonumber\]
El uso de ecuaciones\ ref {A} conduce a la fuerza neta de flotabilidad
\[\oint \mathbf{F} \cdot d\mathbf{S}= \int_{Enclosed \ vol} \frac{d P}{ d z} d \tau = − \int_{Enclosed \ vol} \rho (z)g(z) d \tau \nonumber\]
El lado derecho de esta ecuación equivale a menos el peso del fluido desplazado. Es decir, la fuerza de flotabilidad es igual al peso del fluido desplazado por el volumen vacío. Tenga en cuenta que esta prueba se aplica tanto a fluidos compresibles, donde la densidad depende de la presión, como a fluidos incompresibles donde la densidad es constante. También se aplica a situaciones en las que la gravedad\(g\) local depende de la posición. Si un objeto de masa\(M\) está completamente sumergido entonces la fuerza neta sobre el objeto es\(Mg − \int_{Enclosed \ vol} \rho (z)g(z) d \tau\). Si el objeto flota en la superficie de un fluido, entonces la fuerza de flotabilidad debe calcularse por separado para el volumen debajo de la superficie del fluido y el volumen superior por encima de la superficie del fluido. La flotabilidad debida al aire desplazado suele ser insignificante ya que la densidad del aire es aproximadamente\(10^{−3}\) veces mayor que la de fluidos como el agua.
Teorema de Stokes
El rizo
Las leyes de Maxwell relacionan la circulación del campo alrededor de un bucle cerrado con la velocidad de cambio de flujo a través de la superficie delimitada por el bucle cerrado. Es posible escribir estas ecuaciones integrales en forma diferencial de la siguiente manera.
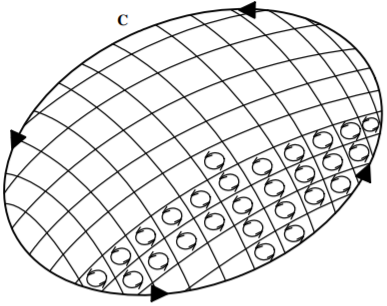
Considere la línea integral alrededor de un bucle cerrado que\(C\) se muestra en la Figura\(\PageIndex{3}\).
Si esta área se subdivide en dos áreas encerradas por bucles\(C_1\) y\(C_2\), entonces la suma de las integrales de línea es la misma
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = \oint_{C_1} \mathbf{F} \cdot d\mathbf{l} + \oint_{C_2} \mathbf{F} \cdot d\mathbf{l} \label{H.18}\]
porque las contribuciones a lo largo de la frontera común cancelan ya que se toman en direcciones opuestas si\(C_1\) y\(C_2\) ambas se toman en la misma dirección. Obsérvese que la línea integral, y el área cerrada correspondiente,
son cantidades vectoriales relacionadas por la regla de la derecha y esto debe tenerse en cuenta al subdividir el área. Así, el área se puede subdividir en un número infinito de piezas para las cuales
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = \sum^{N \rightarrow \infty}_i \oint_{C_i} \mathbf{F} \cdot d\mathbf{l} = \sum^{N \rightarrow \infty}_i \frac{\oint_{C_i} \mathbf{F} \cdot d\mathbf{l}}{ \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}} } \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}} \label{H.19}\]
donde\(\Delta \mathbf{S}_i\) está el área infinitossimal delimitada por el sub-bucle cerrado\(C_i\) y\(\Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}}\) es el componente normal de esta área apuntando a lo largo de la\(\widehat{\mathbf{n}}\) dirección que es la dirección a lo largo de la cual apunta la integral de línea.
El componente del curl de la función vectorial a lo largo de la dirección\( \widehat{\mathbf{n}} \) se define como
\[(curl \mathbf{F}) \cdot \widehat{\mathbf{n}} \equiv Lim_{\Delta S\rightarrow 0} \sum^{N \rightarrow \infty}_i \frac{\oint_{C_i} \mathbf{F} \cdot d\mathbf{l}}{ \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}} } \label{H.20}\]
Así, la integral de línea se puede escribir como
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = \sum^{N \rightarrow \infty}_i \frac{\oint_{C_i} \mathbf{F} \cdot d\mathbf{l}}{ \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}}} \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}} \label{H.21} \\ = \int [(curl \mathbf{F}) \cdot \widehat{\mathbf{n}}] d\mathbf{S}_i \cdot \widehat{\mathbf{n}}\]
El producto\(\widehat{\mathbf{n}} \cdot \widehat{\mathbf{n}} = 1\), es decir, esto es cierto independientemente de la dirección del bucle infinitossimal. Así la relación anterior conduce al teorema de Stokes
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = \int_{Area \ bounded \ by \ C} (curl \mathbf{F}) \cdot d\mathbf{S} \label{H.22}\]
Esto relaciona la línea integral con una integral de superficie sobre una superficie delimitada por el bucle.
Curl en coordenadas cartesianas
Considera el rectángulo infinitossimal\(\Delta x\Delta y\) apuntando en la\(\widehat{\mathbf{k}}\) dirección que se muestra en la Figura\(\PageIndex{4}\).
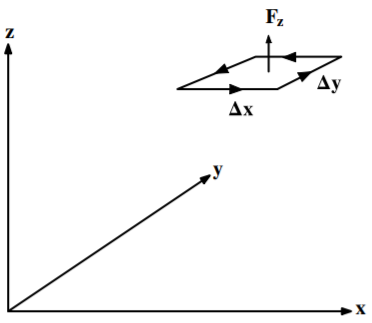
La línea integral, tomada de manera diestra alrededor\(\widehat{\mathbf{k}}\) da
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = F_x\Delta x + \left( F_y + \frac{\partial F_y}{ \partial x} \Delta x \right) − \left( F_x + \frac{\partial F_x}{ \partial y} \Delta y \right) − F_y\Delta y = \left( \frac{\partial F_y }{\partial x} − \frac{\partial F_x }{\partial y} \right) \Delta x\Delta y \label{H.23}\]
Así ya que\(\Delta x\Delta y = \Delta \mathbf{S}_z\) el\(z\) componente del rizo viene dado por
\[(curl \mathbf{F}) \cdot \widehat{\mathbf{k}} = \frac{\oint_{C_i} \mathbf{F} \cdot d\mathbf{l}}{ \Delta \mathbf{S}_i \cdot \widehat{\mathbf{n}}} = \left(\frac{\partial F_y}{ \partial x} − \frac{\partial F_x}{ \partial y} \right) \label{H.24}\]
El mismo argumento para el componente del rizo en la\(y\) dirección viene dado por
\[(curl \mathbf{F}) \cdot\widehat{\mathbf{j}}= \left(\frac{\partial F_x }{\partial z} − \frac{\partial F_z}{ \partial x} \right) \label{H.25}\]
Del mismo modo, el mismo argumento para el componente del rizo en la\(x\) dirección viene dado por
\[(curl \mathbf{F}) \cdot\widehat{\mathbf{i}}= \left(\frac{\partial F_z }{\partial y} − \frac{\partial F_y }{\partial z} \right) \label{H.26}\]
Así, la combinación de los tres componentes del rizo da
\[curl \mathbf{F} = \left(\frac{\partial F_z}{ \partial y} − \frac{\partial F_y }{\partial z} \right)\widehat{\mathbf{i}}+ \left(\frac{\partial F_x}{ \partial z} − \frac{\partial F_z}{ \partial x} \right) \widehat{\mathbf{j}} + \left(\frac{\partial F_y }{\partial x} − \frac{\partial F_x }{\partial y} \right) \widehat{\mathbf{k}} \label{H.27}\]
Tenga en cuenta que el producto cruzado del operador con el vector\(\mathbf{F}\) es
\[\boldsymbol{\nabla} \times \mathbf{F} = \begin{vmatrix} \widehat{\mathbf{i}} & \widehat{\mathbf{j}} & \widehat{\mathbf{k}} \\ \frac{\partial}{ \partial x} & \frac{\partial}{ \partial y} & \frac{\partial}{ \partial z} \\ F_x & F_y & F_z \end{vmatrix} \label{H.28}\]
que es idéntico al lado derecho de la relación para el rizo en coordenadas cartesianas. Es decir;
\[\boldsymbol{\nabla} \times \mathbf{F} = curl \overrightarrow{\mathbf{F}} \label{H.29}\]
Por lo tanto, el teorema de Stokes se puede reescribir
\[\oint_C \mathbf{F} \cdot d\mathbf{l} = \int_{Area \ bounded \ by \ C} (curl \mathbf{F}) \cdot d\mathbf{S} = \int_{Area \ bounded \ by \ C} (\boldsymbol{\nabla} \times F) \cdot d\mathbf{S} \label{H.30}\]
El significado físico del rizo es que es la circulación, o rotación, para un bucle infinitossimal en cualquier ubicación. La palabra curl es alemana para rotación.
Ejemplo\(\PageIndex{3}\): Maxwell's circulation equations
Como ejemplo del uso del rizo, considera la Ley de Faraday
\[\int_{Closed \ loop \ C} \mathbf{E} \cdot d\mathbf{l} = − \int_{surface \ bounded \ by \ C} \frac{\partial \mathbf{B}}{ \partial t} \cdot \partial \mathbf{S} \nonumber\]
El uso del teorema de Stokes da
\[\oint_C \mathbf{E} \cdot d\mathbf{l} = \int_{Surface \ bounded \ by \ C} (\boldsymbol{\nabla} \times \mathbf{E}) \cdot d\mathbf{S} \nonumber\]
Estas dos relaciones son independientes de la forma del bucle cerrado, así obtenemos la Ley de Faraday en la forma diferencial
\[(\boldsymbol{\nabla} \times \mathbf{E}) = −\frac{\partial \mathbf{B}}{ \partial t} \nonumber\]
Una forma diferencial de la ley Ampère-Maxwell también se puede obtener de
\[\int_{Closed \ loop \ C} \mathbf{B} \cdot d\mathbf{l} = \mu_0 \int_{Bounded \ by \ C} (\mathbf{j} + \varepsilon_0 \frac{\partial \mathbf{E}}{ \partial t} ) \cdot d\mathbf{S} \nonumber\]
Usando el teorema de Stokes
\[\oint_C \mathbf{B} \cdot d\mathbf{l} = \int_{Surface \ bounded \ by \ C} (\boldsymbol{\nabla} \times \mathbf{B}) \cdot d\mathbf{S} \nonumber\]
Nuevamente esto es independiente de la forma del bucle y así obtenemos la ley Ampère-Maxwell en forma diferencial
\[\boldsymbol{\nabla} \times \mathbf{B} = \mu_0 \mathbf{j} + \mu_0\varepsilon_0 \frac{\partial \mathbf{E}}{ \partial t} \nonumber\]
Las formas diferenciales de las relaciones de circulación de Maxwell son más fáciles de aplicar que las ecuaciones integrales porque la forma diferencial relaciona el rizo con las derivadas del tiempo en la misma ubicación específica.
Formulaciones potenciales de campos libres de rizo y libre de divergencias
Las consecuencias interesantes resultan del teorema de Divergencia y del Teorema de Stokes para campos vectoriales que están libres de rizo o libres de divergencia. En particular, dos teoremas resultan de las segundas derivadas de un campo vectorial.
Teorema 1 - Campos libres de rizos (irrotacionales):
Para campos libres de rizos
\[\boldsymbol{\nabla} \times \mathbf{F} = 0 \label{H.31}\]
en todas partes. Esto se obedece automáticamente si el campo vectorial se expresa como el gradiente de un campo escalar
\[\mathbf{F} = \boldsymbol{\nabla}\phi \label{H.32}\]
desde
\[\boldsymbol{\nabla}\times (\boldsymbol{\nabla}\phi)=0 \label{H.33}\]
Es decir, cualquier campo vectorial libre de rizo se puede expresar en términos del gradiente de un campo escalar.
El campo escalar no\(\phi\) es único, es decir, se\(\alpha\) puede agregar cualquier constante\(\phi\) ya que\(\boldsymbol{\nabla}\alpha = 0\), es decir, la adición de la constante\(\alpha \) no cambia el gradiente. Esta independencia a la adición de un número al potencial escalar se denomina invarianza de calibre discutida en el capítulo\(13.2\), para lo cual
\[\mathbf{F} = \boldsymbol{\nabla}\phi^{\prime} = \boldsymbol{\nabla} (\phi + \alpha ) = \boldsymbol{\nabla}\phi \label{H.34}\]
Es decir, esta transformación invariante de calibre no cambia lo observable\(\mathbf{F}\). El campo electrostático\(\mathbf{E}\) y el campo de gravitación\(\mathbf{g}\) son ejemplos de campos irrotacionales que se pueden expresar como el gradiente de potenciales escalares.
Teorema 2 - Campos libres de divergencia (solenoidales):
Para campos libres de divergencias
\[\boldsymbol{\nabla} \cdot \mathbf{F} = 0 \label{H.35}\]
en todas partes. Esto se obedece automáticamente si el campo\(\mathbf{F}\) se expresa en términos del rizo de un campo vectorial de\(\mathbf{G}\) tal manera que
\[\mathbf{F} = \boldsymbol{\nabla} \times \mathbf{G} \label{H.36}\]
ya que\(\boldsymbol{\nabla} \cdot \boldsymbol{\nabla} \times \mathbf{G} = \mathbf{0}\). Es decir, cualquier campo vectorial libre de divergencia puede escribirse como el rizo de un campo vectorial relacionado.
Como se discutió en el capítulo\(13.2\), el potencial vectorial no\(\mathbf{G}\) es único ya que se puede hacer una transformación de calibre agregando el gradiente de cualquier campo escalar, es decir, la transformación de calibre\(\mathbf{G^{\prime}} = \mathbf{G} + \boldsymbol{\nabla}\boldsymbol{\varphi}\) da
\[\mathbf{F} = \boldsymbol{\nabla} \times \mathbf{G^{\prime}} = \boldsymbol{\nabla}\times (\mathbf{G} + \boldsymbol{\nabla}\boldsymbol{\varphi}) = \boldsymbol{\nabla} \times \mathbf{G}. \label{H.37}\]
Esta invarianza de calibre para la transformación al potencial vectorial\(\mathbf{G^{\prime}}\) no cambia el campo vectorial observable\(\mathbf{F}\). El campo magnético\(\mathbf{B}\) es un ejemplo de un campo solenoidal que se puede expresar en términos del rizado de un potencial vectorial\(\mathbf{A}\).
Ejemplo\(\PageIndex{4}\): Electromagnetic fields
Las interacciones electromagnéticas se encuentran frecuentemente en la mecánica clásica, por lo que es útil discutir el uso de formulaciones potenciales de la electrodinámica.
Para electrostática, las ecuaciones de Maxwell dan eso
\[\boldsymbol{\nabla} \times \mathbf{E} = 0 \nonumber\]
Por lo tanto, el teorema 1 establece que es posible expresar este campo eléctrico estático como el gradiente del potencial eléctrico escalar\(V\), donde
\[\mathbf{E} = −\boldsymbol{\nabla}V \nonumber\]
Para la electrodinámica, las ecuaciones de Maxwell dan que
\[(\boldsymbol{\nabla} \times \mathbf{E}) + \frac{\partial \mathbf{B}}{ \partial t} = 0 \nonumber\]
Supongamos que el campo magnético se puede expresar en términos del potencial vectorial\(\mathbf{B} = \boldsymbol{\nabla} \times \mathbf{A}\), entonces la ecuación anterior se convierte
\[\boldsymbol{\nabla} \times (\mathbf{E} + \frac{\partial \mathbf{A}}{ \partial t} )=0 \nonumber\]
El teorema 1 da que este campo sin rizos puede expresarse como el gradiente de un campo escalar, aquí tomado como el potencial eléctrico\(V \).
\[(\mathbf{E} + \frac{\partial \mathbf{A}}{ \partial t} ) == −\boldsymbol{\nabla}V \nonumber\]
es decir
\[\mathbf{E} = −(\boldsymbol{\nabla}V + \frac{\partial \mathbf{A}}{ \partial t} ) \nonumber\]
La ley de Gauss establece que
\[\boldsymbol{\nabla}\cdot \mathbf{E} = \frac{\rho}{ \varepsilon_0} \nonumber\]
que se puede reescribir como
\[\boldsymbol{\nabla}\cdot \mathbf{E} = −\boldsymbol{\nabla}^2V − \frac{\partial (\boldsymbol{\nabla} \cdot \mathbf{A}) }{\partial t} = \frac{\rho}{ \varepsilon_0} \label{X} \tag{X}\]
De igual manera, la inserción del potencial vectorial\(\mathbf{A}\) en la Ley de Ampère da
\[\boldsymbol{\nabla} \times \mathbf{B} = \boldsymbol{\nabla} \times (\boldsymbol{\nabla} \times \mathbf{A})=\mu_0 \mathbf{j} + \mu_0 \varepsilon_0 \frac{\partial\mathbf{ E }}{\partial t} = \mu_0 \mathbf{j} −\mu_0\varepsilon_0\boldsymbol{\nabla} \left(\frac{\partial V}{ \partial t} \right) − \mu_0\varepsilon_0 \left(\frac{\partial^2\mathbf{A}}{ \partial t^2} \right) \nonumber\]
El uso de la identidad vectorial\( \boldsymbol{\nabla} \times (\boldsymbol{\nabla} \times \mathbf{A}) = \boldsymbol{\nabla} (\boldsymbol{\nabla} \cdot \mathbf{A}) − \boldsymbol{\nabla}^2 A\) permite que la ecuación anterior se reescriba como
\[\left(\nabla^2\mathbf{A}−\mu_0\varepsilon_0 \left(\frac{\partial^2\mathbf{A}}{ \partial t^2} \right)\right) − \boldsymbol{\nabla} \left( \boldsymbol{\nabla} \cdot \mathbf{A}+\mu_0\varepsilon_0 \left(\frac{\partial V }{\partial t} \right)\right) = −\mu_0 \mathbf{j} \tag{Y} \label{Y} \]
El uso del potencial escalar\(V\) y el potencial vectorial\(\mathbf{A}\) conduce a dos ecuaciones acopladas\ ref {X} y\ ref {Y}. Estas ecuaciones acopladas pueden transformarse en dos ecuaciones desacopladas aprovechando la libertad para hacer una transformación de calibre para el potencial vectorial de tal manera que los corchetes centrales en ambas ecuaciones\ ref {X} y\ ref {Y} sean cero. Es decir, elegir el calibre Lorentz
\[\boldsymbol{\nabla} \cdot \mathbf{A} = −\mu_0\varepsilon_0 \left(\frac{\partial V}{ \partial t} \right) \nonumber\]
simplifica las ecuaciones\ ref {X} y\ ref {Y} para ser
\[\boldsymbol{\nabla}^2V −\mu_0\varepsilon_0 \frac{\partial^2V}{ \partial t^2} = − \frac{\rho}{ \varepsilon_0} \nonumber\]
\[\boldsymbol{\nabla}^2\mathbf{A}−\mu_0\varepsilon_0 \left(\frac{\partial^2\mathbf{A}}{ \partial t^2} \right) = −\mu_0 \mathbf{j} \nonumber\]
La virtud de usar el calibre Lorentz, en lugar del calibre Coulomb\(\boldsymbol{\nabla} \cdot \mathbf{A} = 0\), es que separa las ecuaciones para los potenciales escalar y vectoriales. Además, estas dos ecuaciones son las ecuaciones de onda para estos dos campos potenciales correspondientes a una velocidad\(c = \frac{1}{ \sqrt{\mu_0\varepsilon_0 }}\). Este ejemplo ilustra el poder de usar el concepto de potenciales en la descripción de campos vectoriales.