
9.4: El derivado covariante
- Page ID
- 126497

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Objetivos de aprendizaje
- Una función de vector constante, o para cualquier tensor de cambio de rango superior cuando se expresa en un nuevo sistema de coordenadas
En esta sección optativa tratamos los temas planteados en la sección 7.5. Allí notamos que en las coordenadas que no son de Minkowski, uno no puede usar ingenuamente cambios en los componentes de un vector como medida de un cambio en el vector mismo. Una función escalar constante permanece constante cuando se expresa en un nuevo sistema de coordenadas, pero lo mismo no es cierto para una función de vector constante, o para cualquier tensor de rango superior. Esto se debe a que el cambio de coordenadas cambia las unidades en las que se mide el vector, y si el cambio de coordenadas es no lineal, las unidades varían de punto a punto. Este tema no pertenece lógicamente a este capítulo, pero lo he colocado aquí porque no se puede discutir con claridad sin tener ya cubiertos tensores de rango superior a uno.

Consideremos el caso unidimensional, en el que un vector\(v^a\) tiene sólo un componente, y la métrica también es un solo número, de manera que podamos omitir los índices y simplemente escribir\(v\) y\(g\). (Solo tenemos que recordar que\(v\) es realmente un vector, aunque estemos dejando fuera el índice superior). Si\(v\) es constante, su derivada\(dv/ dx\), computada de la manera ordinaria sin ningún término de corrección, es cero. Si además asumimos que la métrica es simplemente la constante\(g = 1\), entonces cero no es solo la respuesta sino la respuesta correcta.
Ahora supongamos que nos transformamos en un nuevo sistema de coordenadas\(X\), y la métrica\(G\), expresada en este sistema de coordenadas, no es constante. Aplicando la ley de transformación del tensor\(V = v\frac{\mathrm{d} X}{\mathrm{d} x}\), tenemos, y la diferenciación con respecto a no\(X\) dará cero, porque el factor\(dX/ dx\) no es constante. Esta es la respuesta equivocada:\(V\) no es realmente variable, simplemente parece variar porque\(G\) sí.
Queremos agregar un término de corrección al operador derivado\(d/ dX\), formando un nuevo operador derivado\(∇_X\) que dé la respuesta correcta. \(∇_X\)se llama la derivada covariante. Este término de corrección es fácil de encontrar si consideramos cuál debería ser el resultado a la hora de diferenciar la métrica en sí. En general, si un tensor parece variar, podría variar ya sea porque realmente sí varía o porque la métrica varía. Si la métrica en sí varía, podría ser ya sea porque la métrica realmente varía o.. porque la métrica varía. En otras palabras, no hay una manera sensata de asignar una derivada covariante distinta de cero a la métrica misma, por lo que debemos tener\(∇_X G = 0\). Por lo tanto, la corrección requerida consiste en\(d/ dX\) sustituir por
\[\nabla _X = \frac{\mathrm{d} }{\mathrm{d} X} - G^{-1}\frac{\mathrm{d} G}{\mathrm{d} X}\]
Aplicando esto a\(G\) da cero. \(G\)es un tensor de segundo rango con dos índices inferiores. Si aplicamos la misma corrección a las derivadas de otros tensores de este tipo, obtendremos resultados distintos de cero, y serán los resultados correctos distintos de cero. Matemáticamente, la forma de la derivada es\(\frac{1}{y}\; \frac{\mathrm{d} y}{\mathrm{d} x}\), la cual se conoce como una derivada logarítmica, ya que es igual\(\frac{\mathrm{d} (\ln y)}{\mathrm{d} x}\). Mide la tasa multiplicativa de cambio de\(y\). Por ejemplo, si\(y\) escala hacia arriba por un factor de\(k\) cuando\(x\) aumenta por\(1\) unidad, entonces la derivada logarítmica de\(y\) es\(\ln k\). La derivada logarítmica de\(e^{cx}\) es\(c\). La naturaleza logarítmica del término de corrección to\(∇_X\) es algo bueno, porque nos permite tomar cambios de escala, que son cambios multiplicativos, y convertirlos en correcciones aditivas al operador derivado. La aditividad de las correcciones es necesaria si el resultado de una derivada covariante va a ser un tensor, ya que los tensores son criaturas aditivas. ¿Qué pasa con las cantidades que no son tensores covariantes de segundo rango? Bajo una reescalación de coordenadas por un factor de\(k\), covectores escalan por\(k^{-1}\), y tensores de segundo rango con dos índices inferiores escalan por\(k^{-2}\). Por lo tanto, el término de corrección debería ser la mitad para los covectores,
\[\nabla _X = \frac{\mathrm{d} }{\mathrm{d} X} - \frac{1}{2}G^{-1}\frac{\mathrm{d} G}{\mathrm{d} X}\]
y debe tener un signo opuesto para los vectores.
Generalizando el término de corrección a derivados de vectores en más de una dimensión, deberíamos tener algo de esta forma:
\[\nabla _a v^b = \partial _a v^b + \Gamma ^b\: _{ac} v^c\]
\[\nabla _a v^b = \partial _a v^b - \Gamma ^c\: _{ba} v_c\]
donde\(Γ^b\: _{ac}\), llamado el símbolo de Christoffel, no se transforma como un tensor, e implica derivados de la métrica. (“Christoffel” se pronuncia “Krist-awful”, con el acento en la sílaba del medio.)
Un problema importante es que cuando evaluamos un componente particular de una derivada covariante tal como\(∇_2 v^3\), es posible que el resultado sea distinto de cero aunque el componente se\(v^3\) desvanezca de manera idéntica.
Ejemplo\(\PageIndex{1}\): Christoffel symbols on the globe
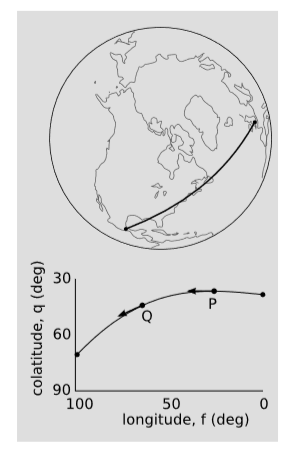
Como ejemplo cualitativo, considere la trayectoria del avión que se muestra en la figura\(\PageIndex{2}\), de Londres a la Ciudad de México. Esta trayectoria es la más corta entre estos dos puntos; tal trayectoria de longitud mínima se denomina geodésica. En física se acostumbra trabajar con la colatitud,\(θ\), medida hacia abajo desde el polo norte, en lugar de la latitud, medida desde el ecuador. En\(P\), sobre el Atlántico Norte, la colatitud del avión tiene un mínimo. (Podemos ver, sin tener que tomarlo por fe de la figura, que tal mínimo debe ocurrir. La forma más fácil de convencerse de esto es considerar un camino que va directamente sobre el polo, en\(θ = 0\).)
At\(P\), el vector de velocidad del avión apunta directamente al oeste. En\(Q\), sobre Nueva Inglaterra, su velocidad tiene un gran componente al sur. Dado que el camino es geodésico y el plano tiene velocidad constante, el vector de velocidad simplemente está siendo transportado en paralelo; la derivada covariante del vector es cero. Ya que tenemos\(v_θ = 0\) en\(P\), la única manera de explicar el valor distinto de cero y positivo de\(∂_φ v^θ\) es que tengamos un valor distinto de cero y negativo de\(Γ^θ\: _{φφ}\).
Por simetría, podemos inferir que\(Γ^θ\: _{φφ}\) debe tener un valor positivo en el hemisferio sur, y debe desaparecer en el ecuador.
\(Γ^θ\:_{φφ}\)se calcula en el ejemplo siguiente.
La simetría también requiere que este símbolo de Christoffel sea independiente\(φ\), y también debe ser independiente del radio de la esfera.
Para calcular la derivada covariante de un tensor de rango superior, solo agregamos más términos de corrección, por ejemplo,
\[\nabla _a U_{bc} = \partial _a U_{bc} - \Gamma ^d\: _{ba}U_{dc} - \Gamma ^d\: _{ca}U_{bd}\]
o
\[\nabla _a U_{b}^c = \partial _a U_{b}^c - \Gamma ^d\: _{ba}U_{d}^c - \Gamma ^c\: _{ad}U_{b}^d\]
Con la derivada parcial\(∂_µ\), no tiene sentido utilizar la métrica para elevar el índice y la forma\(∂_µ\). Tiene sentido hacerlo con derivados covariantes, por lo que\(\nabla ^a = g^{ab} \nabla _b\) es una identidad correcta.
Coma, punto y coma y notación de pistas de pájaros
Algunos autores utilizan superíndices con comas y punto y coma para indicar derivadas parciales y covariantes. Las siguientes ecuaciones dan notaciones equivalentes para las mismas derivadas:
\[\partial _\mu = \frac{\partial }{\partial x^\mu }\]
\[\partial _\mu X_\nu = X_{\nu ,\mu }\]
\[\nabla _a X_b = X_{b;a}\]
\[\nabla ^a X_b = X_b\: ^{;a}\]
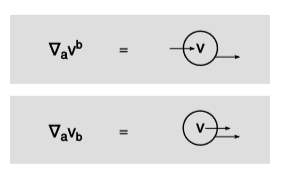
La figura\(\PageIndex{3}\) muestra dos ejemplos de la notación correspondiente de las pistas de aves. Debido a que las huellas de aves están destinadas a ser manifiestamente coordinadasindependientemente, no tienen una forma de expresar derivados no covariantes.
Encontrar el símbolo de Christoffel a partir de la métrica
Ya encontramos el símbolo de Christoffel en términos de la métrica en una dimensión. Expresándolo en notación tensora, tenemos
\[\Gamma ^d\: _{ba} = \frac{1}{2}g^{cd}(\partial _? g_{??})\]
donde la inversión de la matriz de un componente\(G\) ha sido reemplazada por inversión matricial y, lo que es más importante, los signos de interrogación indican que habría más de una forma de colocar los subíndices para que el resultado fuera una ecuación de tensor gramatical. La forma más general para el símbolo de Christoffel sería
\[\Gamma ^b\: _{ac} = \frac{1}{2}g^{db}(L\partial _c g_{ab} + M\partial _a g_{cb} + N\partial _b g_{ca})\]
donde\(L\),\(M\), y\(N\) son constantes. La consistencia con la expresión unidimensional requiere\(L + M + N = 1\). La condición\(L = M\) surge por motivos físicos, no matemáticos; refleja el hecho de que los experimentos no han mostrado evidencia de un efecto llamado torsión, en el que los vectores rotarían de cierta manera cuando se transportan. Los\(M\) términos\(L\) y tienen un significado físico diferente al\(N\) término.
Supongamos que un observador utiliza coordenadas tales que todos los objetos se describen como alargados con el tiempo, y el cambio de escala acumulado a lo largo de un día es un factor de\(k > 1\). Esto es descrito por la derivada\(∂_t g_{xx} < 1\), lo que afecta el\(M\) término. Dado que la métrica se utiliza para calcular distancias cuadradas, el elemento de la\(g_{xx}\) matriz se escala hacia abajo por\(1/√k\). Para compensar\(∂_t v^x < 0\), entonces necesitamos agregar un término de corrección positiva,\(M > 0\), a la derivada covariante. Cuando el mismo observador mide la tasa de cambio de un vector\(v^t\) con respecto al espacio, la tasa de cambio resulta ser demasiado pequeña, porque la variable que diferencia con respecto a la que se diferencia es demasiado grande. Esto requiere\(N < 0\), y la corrección es del mismo tamaño que la\(M\) corrección, entonces\(|M| = |N|\). Nos encontramos\(L = M = -N = 1\).
Autocomprobación: ¿El argumento anterior depende del uso del espacio para una coordenada y el tiempo para la otra?
La expresión general resultante para el símbolo de Christoffel en términos de la métrica es
\[\Gamma ^c\: _{ab} = \frac{1}{2}g^{cd}(\partial _a g_{bd} + \partial _b g_{ad} - \partial _d g_{ab})\]
Uno puede volver atrás y comprobar que esto da\(\nabla _c g_{ab} = 0\).
Autocomprobación: En el caso de la\(1\) dimensión, mostrar que esto se reduce al resultado anterior de\(-\frac{1}{2}\frac{\mathrm{d} G}{\mathrm{d} X}\).
\(Γ\)no es un tensor, es decir, no se transforma de acuerdo con las reglas de transformación del tensor. Como\(Γ\) no es un tensor, no es obvio que el derivado covariante, que se construye a partir de él, sea tensorial. Pero si no es obvio, tampoco es sorprendente —el objetivo de la derivación anterior era obtener resultados que fueran independientes de la coordinación.
Ejemplo\(\PageIndex{2}\): Christoffel symbols on the globe, quantitatively
En Ejemplo\(\PageIndex{1}\), inferimos las siguientes propiedades para el símbolo de Christoffel\(Γ^θ\: _{φφ}\) en una esfera de radio\(R: Γ^θ\: _{φφ}\) es independiente de\(φ\) y\(R\),\(Γ^θ\: _{φφ} < 0\) en el hemisferio norte (colatitud\(θ\) menor que\(π/2\)),\(Γ^θ\: _{φφ} = 0\) en el ecuador, y\(Γ^θ\: _{φφ} > 0\) en el hemisferio sur.
La métrica en una esfera es\(ds^2 = R^2 dθ^2 + R^2 sin^2 θdφ^2\). El único término que no se desvanece en la expresión for\(Γ^θ\: _{φφ}\) es el que involucra\(∂_θ g_{φφ} = 2R^2 sinθcosθ\). El resultado es\(Γ^θ\: _{φφ} = -sinθcosθ\), que se puede verificar para tener las propiedades reclamadas anteriormente.
La ecuación geodésica
Una línea mundial es una curva similar al tiempo en el espacio-tiempo. Como caso especial, algunas de esas curvas en realidad no son curvas sino rectas. Físicamente, los que consideramos rectos son aquellos que podrían ser la línea del mundo de una partícula de prueba sobre la que no actúa ninguna fuerza no gravitacional (sección 5.1). Matemáticamente, mostraremos en esta sección cómo se pueden utilizar los símbolos de Christoffel para encontrar ecuaciones diferenciales que describan dicho movimiento. La línea mundial de una partícula de prueba se llama geodésica. Las ecuaciones también tienen soluciones que son espaciales o similares a la luz, y consideramos que estas también son geodésicas.
La geodésica juega el mismo papel en la relatividad que las líneas rectas juegan en la geometría euclidiana. En geometría euclidiana, podemos especificar dos puntos y pedir la curva que los conecta que tenga una longitud mínima. La respuesta es una línea. En la relatividad especial, un geodésico similar al tiempo maximiza el tiempo adecuado (sección 2.4) entre dos eventos.
En la relatividad especial, las geodésicas están dadas por ecuaciones lineales cuando se expresan en coordenadas de Minkowski, y el vector de velocidad de una partícula de prueba tiene componentes constantes cuando se expresa en coordenadas de Minkowski. En la relatividad general, las coordenadas de Minkowski no existen, y las geodésicas no tienen las propiedades que esperamos basadas en la intuición euclidiana; por ejemplo, las geodésicas inicialmente paralelas pueden luego converger o divergir.
Caracterización de la geodésica
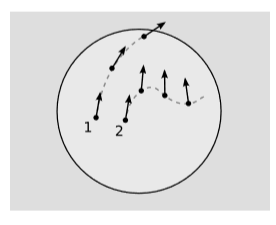
Un geodésico puede definirse como una línea mundial que conserva la tangencia bajo transporte paralelo, figura\(\PageIndex{4}\). Esta es esencialmente una forma matemática de expresar la noción que anteriormente hemos expresado de manera más informal en términos de “mantenerse en el rumbo” o moverse “inercialmente”. (Por razones que se discuten con más detalle a continuación, esta definición es preferible a definir una geodésica como una curva de longitud métrica extrema o estacionaria).
Una curva se puede especificar dando funciones\(x^i(λ)\) para sus coordenadas, donde\(λ\) es un parámetro real. Un vector tendido tangente a la curva puede entonces calcularse usando derivadas parciales,\(T^i = ∂x^i/∂λ\). Hay tres formas en las que una función vectorial de\(λ\) podría cambiar:
- podría cambiar por la razón trivial de que la métrica está cambiando, de manera que sus componentes cambiaron al expresarse en la nueva métrica
- podría cambiar sus componentes perpendiculares a la curva; o
- podría cambiar su componente paralelo a la curva.
La posibilidad 1 no debe considerarse realmente un cambio en absoluto, y la definición de la derivada covariante está diseñada específicamente para ser insensible a este tipo de cosas. 2 no puede aplicarse a\(T^i\), que es tangente por construcción. Por lo tanto, sería conveniente si\(T^i\) pasara a ser siempre de la misma longitud. Si es así, entonces 3 tampoco sucedería, y podríamos reexpresar la definición de un geodésico diciendo que la derivada covariante de\(T^i\) era cero. Por esta razón, asumiremos para el resto de esta sección que la parametrización de la curva tiene esta propiedad. En un contexto newtoniano, podríamos imaginar que\(x^i\) las coordenadas son puramente espaciales, y\(λ\) ser una coordenada de tiempo universal. Entonces interpretaríamos\(T^i\) como la velocidad, y la restricción sería a una parametrización que describiera el movimiento con velocidad constante. En relatividad, la restricción es que\(λ\) debe ser un parámetro afín. Por ejemplo, podría ser el tiempo adecuado de una partícula, si la curva en cuestión es similar al tiempo.
Derivada covariante con respecto a un parámetro
La notación de en el apartado anterior no se adapta del todo a nuestros propósitos actuales, ya que nos permite expresar una derivada covariante con respecto a una de las coordenadas, pero no con respecto a un parámetro como\(λ\). Nos gustaría anotar la derivada covariante de\(T^i\) con respecto a\(λ\) as\(∇_λ T^i\), aunque\(λ\) no sea una coordenada. Para conectar los dos tipos de derivados, podemos usar una derivada total. Para dejar clara la idea, así es como calculamos una derivada total para una función escalar\(f(x,y)\), sin notación tensora:
\[\frac{\mathrm{d} f}{\mathrm{d} \lambda } = \frac{\partial f}{\partial x} \frac{\partial x}{\partial \lambda } + \frac{\partial f}{\partial y} \frac{\partial y}{\partial \lambda }\]
Esto es solo la generalización de la regla de la cadena a una función de dos variables. Por ejemplo, si\(λ\) representa tiempo y\(f\) temperatura, entonces esto nos diría la tasa de cambio de la temperatura ya que un termómetro se transportaba por el espacio. Aplicando esto al problema actual, expresamos la derivada covariante total como
\[\begin{align*} \nabla _{\lambda } T^i &= (\nabla _b T^i)\frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\\ &= (\partial _b T^i + \Gamma ^i \: _{bc}T^c)\frac{\mathrm{d} x^b}{\mathrm{d} \lambda } \end{align*}\]
La ecuación geodésica
Reconociendo\(\partial _b T^i \frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\) como un derivado total no covariante, encontramos
\[\nabla _{\lambda } T^i = \frac{\mathrm{d} T^i}{\mathrm{d} \lambda } + \Gamma ^i\: _{bc} T^c \frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\]
Sustituyendo\(\frac{\partial x^i}{\partial\lambda }\) y ajustando la derivada covariante igual a cero, obtenemos\(T^i\)
\[\frac{\mathrm{d}^2 x^i}{\mathrm{d} \lambda ^2} + \Gamma ^i\: _{bc} \frac{\mathrm{d} x^c}{\mathrm{d} \lambda }\frac{\mathrm{d} x^b}{\mathrm{d} \lambda } = 0\]
Esto se conoce como la ecuación geodésica.
Si esta ecuación diferencial se satisface para un parámetro afín\(λ\), entonces también se satisface para cualquier otro parámetro afín\(λ' = aλ + b\), donde\(a\) y\(b\) son constantes. Recuerde que los parámetros afín solo se definen a lo largo de geodésicas, no a lo largo de curvas arbitrarias No podemos comenzar definiendo un parámetro afín y luego usarlo para encontrar geodésicas usando esta ecuación, porque no podemos definir un parámetro afín sin antes especificar un geodésico. De igual manera, no podemos hacer primero el geodésico y luego el parámetro afín, porque si ya tuviéramos un geodésico en la mano, no necesitaríamos la ecuación diferencial para encontrar un geodésico. La solución a este acertijo de pollo y huevo es anotar las ecuaciones diferenciales e intentar encontrar una solución, sin tratar de especificar de antemano ni el parámetro afín ni el geodésico.
La ecuación geodésica es útil para establecer uno de los fundamentos teóricos necesarios de la relatividad, que es la singularidad de la geodésica para un conjunto dado de condiciones iniciales. Si la geodésica no se determinara de manera única, entonces las partículas no tendrían forma de decidir cómo moverse. La forma de la ecuación geodésica garantiza la singularidad, ya que se puede utilizar para definir un algoritmo que construya una geodésica para un conjunto dado de condiciones iniciales.
No caracterizable como curvas de longitud estacionaria
La ecuación geodésica puede parecer engorrosa. ¿Por qué no definir simplemente un geodésico como una curva que conecta dos puntos que maximiza o minimiza su propia longitud métrica? El problema es que esto no generaliza muy bien a curvas que no son de tiempo. El lector casual tal vez desee omitir el resto de esta subsección, que discute este punto.
Para el caso espacial, nos gustaría definir la longitud métrica adecuada\(σ\) de una curva como\(\sigma = \int \sqrt{-g{ij} dx^i dx^j}\), siendo necesario el signo menos porque estamos usando una métrica con firma\(+---\), y queremos que el resultado sea real. La cantidad se\(σ\) puede considerar como el resultado que obtendríamos aproximando la curva con una cadena de segmentos de línea corta, y agregando sus longitudes adecuadas. En el caso de que toda la curva se encuentre dentro de un plano de simultaneidad para algún observador,\(σ\) es la longitud euclidiana de la curva medida por ese observador. Nuestro no\(σ\) es ni un máximo ni un mínimo para un geodésico espacial que conecta dos eventos. Para ver esto, escoge un fotograma en el que los dos eventos sean simultáneos, y adopta las coordenadas de Minkowski de tal manera que ambos puntos se encuentren en el\(x\) eje -eje. Deformar lo geodésico en el\(xy\) plano hace lo que esperamos de acuerdo a la geometría euclidiana: aumenta la longitud. Deformarlo en el\(xt\) plano, sin embargo, reduce la longitud (como se hace evidente cuando se considera el caso de una gran deformación que convierte la geodésica en una curva de longitud cero, que consiste en dos segmentos de línea similares a la luz). El resultado es que el geodésico no es ni un minimizador ni un maximizador de\(σ\).
Maximizar o minimizar la longitud adecuada es un requisito fuerte. Un criterio relacionado pero más permisivo para aplicar a una curva que conecta dos puntos fijos es que si variamos la curva en alguna pequeña cantidad, la variación de longitud debería desvanecerse a primer orden. Por ejemplo, dos puntos\(A\) y\(B\) en la superficie de la tierra determinan un gran círculo, es decir, un círculo cuya circunferencia es igual a la de la tierra. Este gran círculo nos da dos caminos diferentes por los cuales podríamos viajar de\(A\) a\(B\). Uno de estos suele ser más largo que el otro. Ambos son lo más rectos que pueden ser mientras se mantienen a la superficie de la tierra, por lo que en este contexto de geometría esférica ambos se consideran geodésicas. Una cosa que los dos caminos tienen en común es que ambos son estacionarios. La estacionariedad se define de la siguiente manera. Dada una cierta curva parametrizada\(γ(t)\), fijemos algún vector\(h(t)\) en cada punto de la curva que es tangente a la superficie terrestre, y dejemos\(h\) ser una función continua de\(t\) que se desvanezca en los puntos finales. Entonces si es pequeño comparado con el radio de la tierra, podemos definir claramente lo que significa perturbar\(h\),\(γ\) produciendo otra curva\(γ∗\) similar a, pero no la misma que,\(γ\). La estacionariedad significa que la diferencia de longitud entre\(γ\) y\(γ∗\) es de orden\(2\) para pequeños. Esta es una generalización de la noción de cálculo elemental de que una función tiene una derivada cero cerca de un extremo o punto de inflección. En nuestro ejemplo en la superficie de la tierra, las dos geodésicas se conectan\(A\) y\(B\) son ambas estacionarias.
Las geodésicas espaciales en la relatividad especial son estacionarias según la definición anterior. No obstante, esta afirmación puede ser engañosa. Debido a que construimos el desplazamiento como el producto\(h\), su derivado también se garantiza que se encoja en proporción a para pequeños. Podríamos aflojar un poco este requisito, y solo exigir que la magnitud del desplazamiento sea de orden. En este caso, se puede demostrar que las curvas espaciales no son estacionarias. Por ejemplo, cualquier curva espacial puede aproximarse a un grado arbitrario de precisión mediante una cadena de segmentos geodésicos similares a la luz. Así, una perturbación arbitrariamente pequeña en la curva reduce su longitud a cero.
La situación empeora aún más para las geodésicas parecidas a la luz. Aquí tendríamos que definir qué era la “longitud”. Podríamos tomar un valor absoluto\(L = \int \sqrt{|g{ij} dx^i dx^j|}\), o no,\(L = \int \sqrt{g{ij} dx^i dx^j}\). Si no tomamos el valor absoluto, no\(L\) necesita ser real para pequeñas variaciones de lo geodésico, y por lo tanto no tenemos un orden bien definido, y no podemos decir si\(L\) es un máximo, un mínimo, o ninguno. Independientemente de si tomamos el valor absoluto, tenemos\(L = 0\) para un geodésico ligero, pero la función raíz cuadrada no tiene un comportamiento diferenciable cuando su argumento es cero, por lo que no tenemos estacionariedad. Si tomamos el valor absoluto, entonces para la curva geodésica, la longitud es cero, que es la más corta posible. Sin embargo, se pueden tener curvas no geodésicas de longitud cero, como una curva helicoidal similar a la luz alrededor\(t\) del eje.