
1.4: Ciencia Oceánica Moderna
- Page ID
- 90116
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Aunque los métodos y propósitos en el centro de lo que impulsa a la humanidad a la exploración oceánica han variado mucho a lo largo de la historia humana, dicha exploración ha permitido una mejor comprensión del vasto espacio que son nuestros océanos. No fue hasta principios del siglo XIX, que el presidente Jefferson financió el estudio de la costa de Estados Unidos para la exploración oceánica (NOAA). En 1872, Challenger Expedition realiza la primera expedición oceánica. En esta misión se descubrieron y observaron por primera vez la salinidad, densidad, temperatura y cientos de especies nuevas (NOAA). En 1912, con el hundimiento del Titanic en las profundidades marinas, impulsó la necesidad de desarrollar formas de exploración utilizando la acústica, para que los objetos pudieran ser detectados antes de hacer contacto con una nave. Esto se aceleró durante la Primera Guerra Mundial, con ambos bandos ideando formas de poder detectar submarinos enemigos (National Geographic).

El Challenger en Juan Fernández (Wikimedia)
Mapeo del fondo oceánico
El mapeo del fondo marino generalmente se realiza midiendo la profundidad del agua en cierto punto, lo que históricamente se hizo usando una “línea de plomo”. Este proceso fue extremadamente lento e inexacto. El mapeo avanzado del fondo marino se hizo posible en la década de 1920 debido a la llegada de los proyectores de sonido submarinos (llamados “sonar”) (NOAA). La tecnología fue creada con el fin de permitir a los barcos aliados combatir a los submarinos alemanes, precursores de los submarinos modernos, proyectando sonido a través del océano y midiendo cantidades de ecolocalización (OIC). Esto podría dar a los usuarios mediciones de distancia y dirección de los objetos submarinos.
Después de la Primera Guerra Mundial, el levantamiento costero y geodésico (que más tarde se convertiría en NOAA) convirtió a la tecnología militar hacia las profundidades para permitirles comenzar a mapear la costa occidental del texto Atlántico, produciendo los primeros mapas detallados del fondo oceánico (NOAA). Incluso con el avance de esta tecnología, el mapeo del fondo marino seguía siendo una tarea difícil, ya que los primeros sistemas de sonar solo podían tomar mediciones de profundidad directamente debajo de la embarcación, haciendo del mapeo un proceso tesioso de moverse de un lado a otro sobre la superficie y conectar puntos de datos individuales entre sí.
A medida que países de todo el mundo se sumergieron en una segunda guerra mundial, avances significativos en la tecnología de sonar que permitieron mediciones más precisas y mejoradas del fondo oceánico. Los datos que se obtuvieron de dichos sistemas fueron cruciales en la construcción de mapas que incluyeron características clave como crestas oceánicas y trincheras de aguas profundas (NOAA). En la década de 1970, los métodos se volvieron más precisos y eficientes cuando la Marina de los Estados Unidos desclasificó el sonar “multihaz”, lo que permitió que los buques de investigación hicieran imágenes más precisas y más grandes del fondo oceánico. Esto, junto con el aumento de la potencia de procesamiento informático, ha permitido a los investigadores recopilar grandes cantidades de datos y compilarlos rápidamente en mapas detallados y precisos.
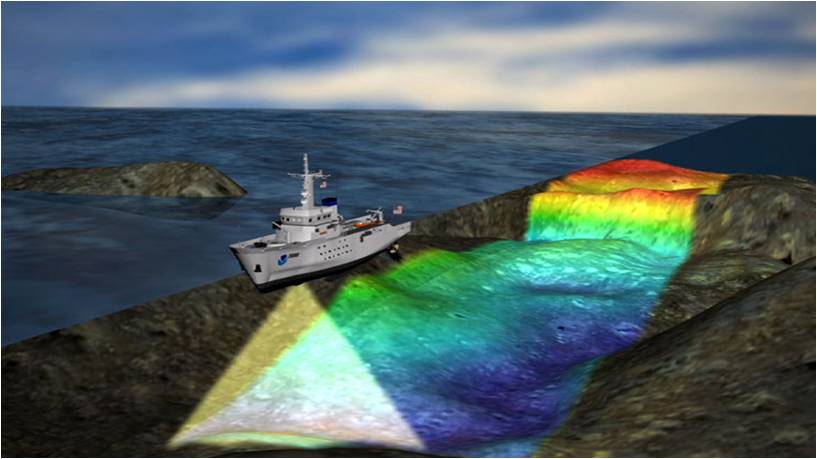
Ecosonda multihaz (Wikimedia)
Vehículos Subacuáticos Autónomos (AUV's)
El primer vehículo sumergible estadounidense se llamó “Tortuga”. En Saybrook, Connecticut 1775, David Bushnell y su hermano construyeron un pequeño submarino de madera en forma de huevo que se utilizó efectivamente en combate naval (el primero en hacerlo) en el puerto de Nueva York (1776). Más de un siglo de avances tecnológicos más tarde, en noviembre de 1879, el reverendo George W. Garrett diseñó el “Resurgam”; el primer submarino moderno estaba propulsado por una máquina de vapor Lamm y podía viajar durante casi diez horas utilizando la energía almacenada en un tanque aislado.

Submarino Tortuga (Wikimedia)
Con la evolución submarina llegó el desarrollo de AUV's, que comenzó en la década de 1960. Durante la década de 1970, muchos bancos de pruebas se desarrollaron con la esperanza de experimentar con tecnología para explorar y definir el potencial de las AUV. Por ejemplo, el Laboratorio de Ingeniería de Sistemas Marinos de la Universidad de New Hampshire colaboró con los esfuerzos en las instalaciones de la Marina de los Estados Unidos en San Diego para desarrollar un marco espacial abierto AUV, el ALERO. Posteriormente, el Instituto de Problemas Tecnológicos Marinos, Academia Rusa de Ciencias inició su programa AUV con el desarrollo de vehículos SKAT y los primeros AUVs de buceo profundo L1 y L2. Generalmente, existen dos tipos de AUV, los sistemas tripulados y no tripulados, los cuales se utilizan principalmente para misiones militares e investigaciones y evaluaciones submarinas, y recolección de datos. A medida que los sistemas de software y la ingeniería avanzaron, los fondos se expandieron y los tecnólogos convergieron (como en el simposio internacional de sumergibles de tecnología de 1980), los AUV finalmente pudieron crecer hasta convertirse en sistemas operativos de primera generación capaces de lograr objetivos definidos. Nuevos sistemas, incluido el Sistema Autónomo de Muestreo Oceanográfico, proporcionaron recursos esenciales para la comercialización del mercado AUV que floreció entre 2000 y 2010. En términos de tecnología AUV, los sistemas han cambiado constantemente de acuerdo con abordar problemas o hallazgos de nuevas tecnologías.
En las últimas tres décadas, la industria se ha centrado principalmente en las siguientes tecnologías: autonomía, sistemas de energía/gestión de energía, imágenes 3D, navegación, procesamiento, sensores y comunicaciones. En el área de la ciencia oceánica, vehículos como ABE, AUTOSUB y otros han recopilado con éxito datos científicamente significativos. La tecnología evoluciona constantemente, ya que se están desarrollando nuevos sensores para oceanografía para futuros programas de adquisición de datos. Además, la Armada de Estados Unidos está apoyando un esfuerzo coordinado denominado AOSN, con el objetivo de crear una red de múltiples AUVs para obtener datos oceanográficos e información en resoluciones temporales y espaciales.

Explorador bentónico autónomo en funcionamiento (Wikimedia)
El proyecto de perforación en aguas profundas
En 1966 se inició una colaboración entre la National Science Foundation y The Regents, y la Universidad de California. El objetivo era iniciar un proyecto de perforación oceánica con el propósito de estudiar el fondo oceánico y encontrar cualquier evidencia de tectónica de placas. El resultado de esta colaboración fue el Golmar Challenger, que salió del puerto de Orange, Texas en 1967. El barco de cuatrocientos pies de largo estaba equipado con suficientes laboratorios, viviendas y comedores para dar cabida a cientos de tripulantes. No obstante, la parte más notable de la nave fue su taladro. Era capaz de alcanzar profundidades de 20,000 pies bajo el agua, lo que dio a los científicos la oportunidad de obtener muestras que antes no podían haber sido recolectadas.

El Golmar Challenger. (Wikipedia)
El barco y su tripulación comenzaron sus primeros treinta meses de extracción y perforación en todos los océanos principales y así como en los mares Rojo y Mediterráneo. Las muestras del núcleo fueron de 30 pies de largo y 2.5 pulgadas de diámetro. Al ser un medio de muestreo tan avanzado en su momento, la tripulación encontró algunos de los descubrimientos más importantes en oceanografía. Sus esfuerzos permitieron el descubrimiento de cúpulas de sal, y a su vez, petróleo en el fondo del océano. Cuando la tripulación perforó en las crestas del medio océano, los científicos a bordo descubrieron que partes del fondo oceánico tenían solo 200 millones de años. Esto significó que el fondo marino estaba siendo reciclado desde que se formaron los océanos de la Tierra, proporcionando pruebas sustanciales de la propagación del fondo marino y la deriva continental. Con más de 300,000 millas náuticas recorridas, 19,000 núcleos recolectados y aproximadamente 600 sitios investigados, El Golmar Challenger se retiró en 1983. Sin embargo, en 1985, el proyecto continuó bajo los nuevos títulos del Programa de Perforación Oceánica y el Programa Internacional de Perforación Oceánica. En lugar del Golmar Challenger estaba la Resolución JOIDES, una nave aún más grande con equipos de perforación más avanzados. Hasta el día de hoy continúan operando tanto los programas como la Resolución JOIDES, tomando muestras de todos los océanos de la Tierra. Los núcleos de muestra de estos barcos se almacenan en centros de investigación de todo el mundo y son considerados invaluables por muchos oceanógrafos.

El Resolución JOIDES, todavía en uso hasta el día de hoy. (Wikipedia)
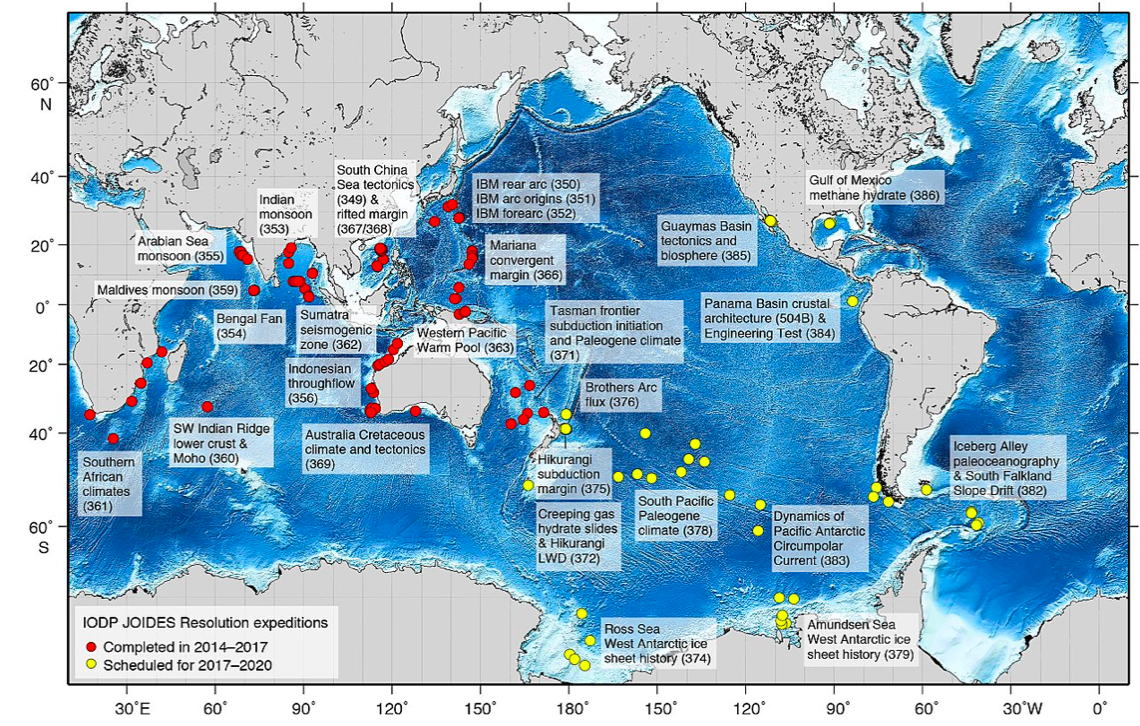
Resolución JOIDES Mapa de expedición 2013-2020 (Wikipedia)
Fuentes
-
NOAA, Administración Nacional Oceánica y Atmósfera, oceanexplorer.noaa.gov
-
OIC, Consultores de imágenes oceánicas, oicinc.com/history_sonars.htm
-
Proyecto de Perforación en Mar Profundo DSPD - http://www.deepseadrilling.org/about.htm
-
DSPD Glomar Challenger - http://www.iodp.tamu.edu/publicinfo/...hallenger.html
-
Woods Hole Institution Historial de Perforación - http://www.divediscover.whoi.edu/his... /drilling.html
-
[Galés] Galés, R., et. al. Avances en redes móviles acústicas sumergibles eficientes” Simposio Internacional UUV, Newport RI, 24-28 de abril de 2000
-
Blidberg, D. Richard. “El Desarrollo de los Vehículos Subacuáticos Autónomos (AUV); Un Breve Resumen”. Instituto Autónomo de Sistemas Submarinos, 2007.
-
https://divediscover.whoi.edu/history-of-oceanography/ocean-drilling/