
7.2.1: Fundamental de estabilidad
- Page ID
- 87458

Se dice que un vehículo está en equilibrio cuando permanece constante o el movimiento es uniforme, es decir, tanto la cantidad lineal como angular de movimiento son constantes. En el caso de una aeronave, el estado de equilibrio típicamente se refiere a un movimiento uniforme en el que las velocidades angulares son nulas, y entonces el movimiento es simplemente una traslación.
La estabilidad es una propiedad relacionada con el estado de equilibrio, que estudia el comportamiento de la aeronave cuando alguna de las variables que describen su estado de equilibrio sufre de una variación (por ejemplo, una ráfaga de viento). La variación en una de esas variables se denomina típicamente perturbación.
La estabilidad se puede estudiar de dos maneras diferentes dependiendo de la escala de tiempo:
- Estabilidad estática.
- Estabilidad dinámica.
Estabilidad estática
El interés radica en el instante del tiempo inmediatamente después de que se produce la perturbación. En la estabilidad estática, se estudian las fuerzas y pares que aparecen inmediatamente después de la perturbación. Si el valor de las variables de estado que describen el equilibrio tiende a aumentar o amplificarse, el estado de equilibrio es estáticamente inestable. Por el contrario, es estáticamente estable. La Figura 7.10 muestra un boceto de una aeronave con tres opciones diferentes para la estabilidad estática después de una perturbación de cabeceo descendente, por ejemplo, una ráfaga de viento hacia abajo.
Estabilidad dinámica
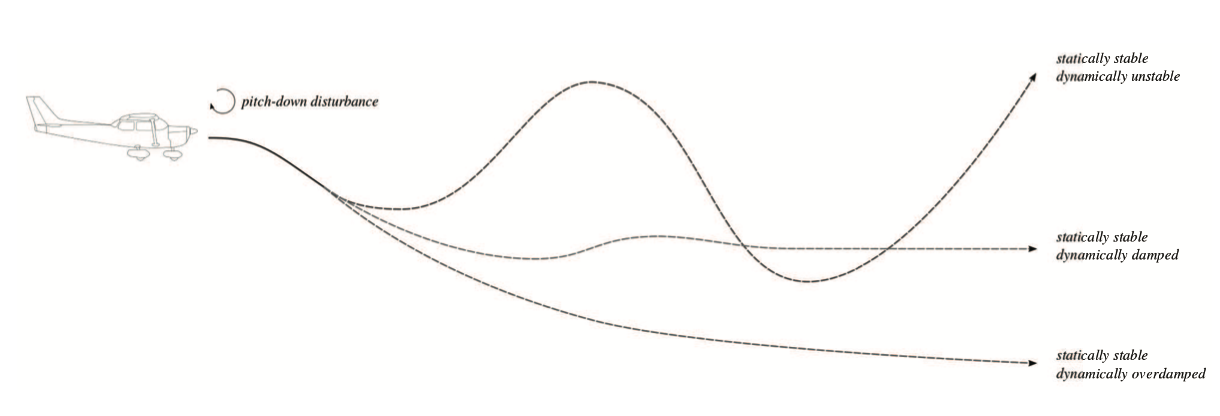
Figura 7.11: Diagrama que muestra los tres casos principales para la estabilidad dinámica de cabeceo de la aeronave. Aquí los tres casos son para una aeronave estáticamente estable. Después de una perturbación de tono, se muestran tres casos: La aeronave es dinámicamente inestable (aunque estáticamente estable); La aeronave está amortiguada dinámicamente (y estáticamente estable); La aeronave está dinámicamente sobreamortiguada (y estáticamente estable). © User:Ariadacapo/Wikimedia Commons/CC0-1.0.
La estabilidad dinámica estudia la evolución con el tiempo de las diferentes variables de vuelo (guiñada, cabeceo, y ángulos de balanceo, velocidad, velocidades angulares, altitud, etc.) cuando se perturbe la condición de equilibrio. La Figura 7.11 muestra un boceto de una aeronave con diferentes comportamientos de estabilidad dinámica después de una perturbación de cabeceo descendente, por ejemplo, una ráfaga de viento hacia abajo. Para estudiar esta evolución necesitamos resolver el sistema de ecuación que describe el movimiento 6DOF de la aeronave. Como se ilustra en el Apéndice A, las ecuaciones son:
\[\vec{F} = m \dfrac{d\vec{V}}{dt},\]
\[\vec{G} = l \dfrac{d\vec{\omega}}{dt}.\]
Se dice que una aeronave es dinámicamente estable cuando después de una perturbación las variables que describen el movimiento de la aeronave tienden a un valor estacionario (ya sea el mismo punto de equilibrio o uno nuevo). Por el contrario, si la aeronave no alcanza un equilibrio se dice que es dinámicamente inestable.
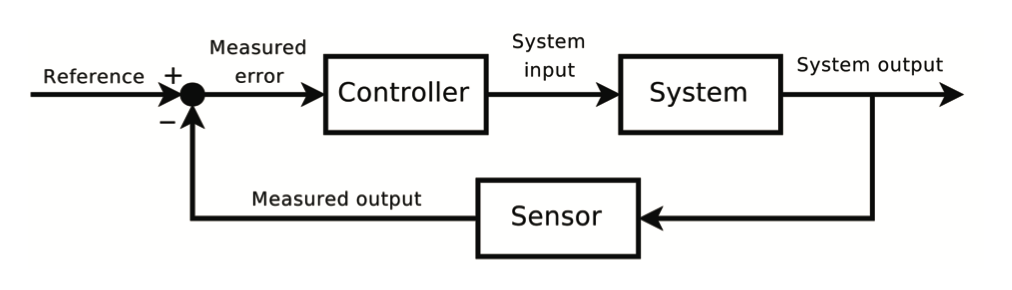
Figura 7.12: Bucle de retroalimentación para controlar el comportamiento dinámico del sistema: El valor detectado se resta del valor deseado para crear la señal de error, la cual es amplificada por el controlador. © Usuario:Myself/Wikimedia Commons/CC-BY-SA-3.0.
Como podría imaginar el lector, los aviones están diseñados para ser dinámicamente estables. De hecho, los estudios avanzados de mecánica de vuelo (fuera del alcance de este libro) se centrarán en el análisis de la estabilidad y el control de las aeronaves. Un análisis típico consistiría en: la linealización de las ecuaciones 6DoF (para las cuales se necesitan las llamadas derivadas de estabilidad); la caracterización de los modos de vuelo (para lo cual se desacoplaría la dinámica longitudinal y lateral y se calcularían valores propios y vectores propios), es decir, periodo corto, phugoide, espiral, convergencia rodante y balanceo holandés; el análisis de la respuesta de bucle abierto (movimiento incontrolado de la aeronave sujeto a acciones de control -una perturbación-, por ejemplo, un paso del acelerador), que terminaría activando algunos de los modos de vuelo; y finalmente la respuesta de control en bucle cerrado (movimiento controlado del aeronave), que consiste en los fundamentos de un diseño autopliot (se establece un valor de referencia para rastrear y el sistema de control está diseñado para corregir desviaciones medidas/estimadas del mismo). El lector es remitido a Etkin y Reid [2] para un curso minucioso sobre esta materia.