
7.2.4: Estabilidad longitudinal y control
- Page ID
- 87478

Estabilidad estática longitudinal
Considera una aeronave en vuelo horizontal, constante y lineal. El avión está en equilibrio bajo las ecuaciones (7.2.3.3) - (7.. 2.3.4).
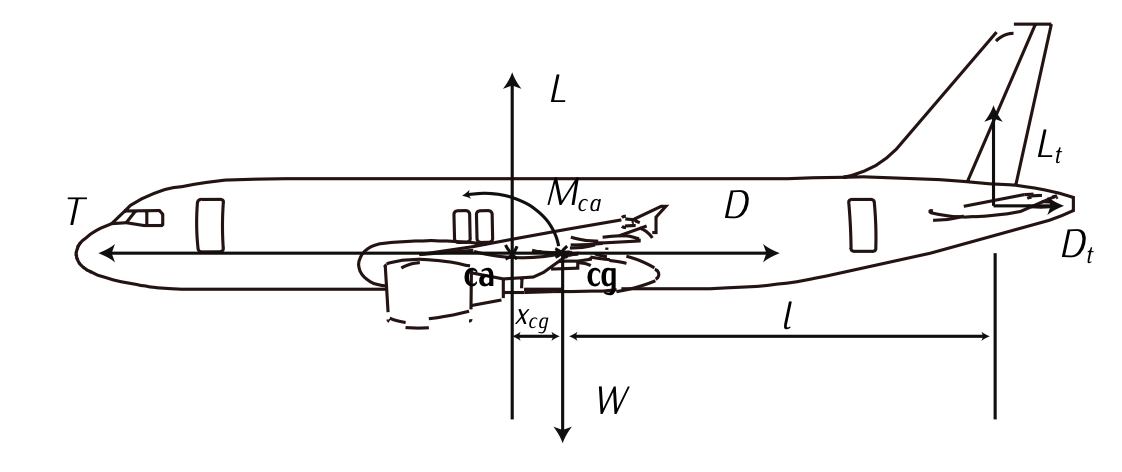
Figura 7.13: Equilibrio longitudinal. Adaptado de Franchini y García [3].
Consideremos ahora que tal equilibrio se ve perturbado por una ráfaga de viento vertical, de manera que el ángulo de ataque aumenta, es decir, hay una perturbación en el ángulo de ataque. En este caso, ambos\(L\) y\(L_t\) aumentan según las curvas de elevación-ángulo de ataque (suponemos que el comportamiento para el estabilizador horizontal es similar al del ala 7) de manera que tenemos\(L + \Delta L\) y\(L_t + \Delta L_t\). Si\(\Delta L_t l > \Delta L\), entonces el ángulo de ataque tiende a disminuir y la aeronave es estáticamente estable. Por el contrario, la aeronave es estáticamente inestable. En otras palabras, el par generado por el estabilizador horizontal es estabilizador (entonces el nombre). Obviamente, esto también depende de la posición relativa de los centros aerodinámicos con respecto al centro de gravedad de la avión8. Por lo tanto, el diseño aerodinámico también es clave para determinar la estabilidad estática.
Los momentos longitudinales externos que actúan sobre el centro de gravedad pueden hacerse adimensionales de la siguiente manera:
\[\dfrac{\sum M_{cg, y}}{\tfrac{1}{2} \rho SV_{\infty}^2 \bar{c}} = c_{M, cg},\]
donde\(\sum M_{cg, y} = -M_{ca} + Lx_{cg} - L_t l\) y\(\bar{c}\) es la cuerda media de la aeronave. La ecuación adimensional es:
\[c_{M, cg} = c_{M0} + c_{M\alpha} \alpha + c_{M \delta_e} \delta_e,\label{eq7.2.4.2}\]
donde\(c_{M, cg}\) está el coeficiente de momentos de la aeronave con respecto a su centro de gravedad,\(c_{M0}\) es el coeficiente de momentos independientemente del ángulo de ataque y la deflexión del elevador,\(c_{M\alpha}\) es la derivada del coeficiente de momentos de la aeronave con respecto al ángulo de ataque, y\(c_{M\delta_e}\) es la derivada del coeficiente de momentos de la aeronave con respecto a la deflexión del elevador. Los coeficientes de la Ecuación (\(\ref{eq7.2.4.2}\))\(c_{M0}\)\(c_{M\alpha}\), y\(c_{M\delta}\) dependen de la geometría y la aerodinámica de la aeronave.
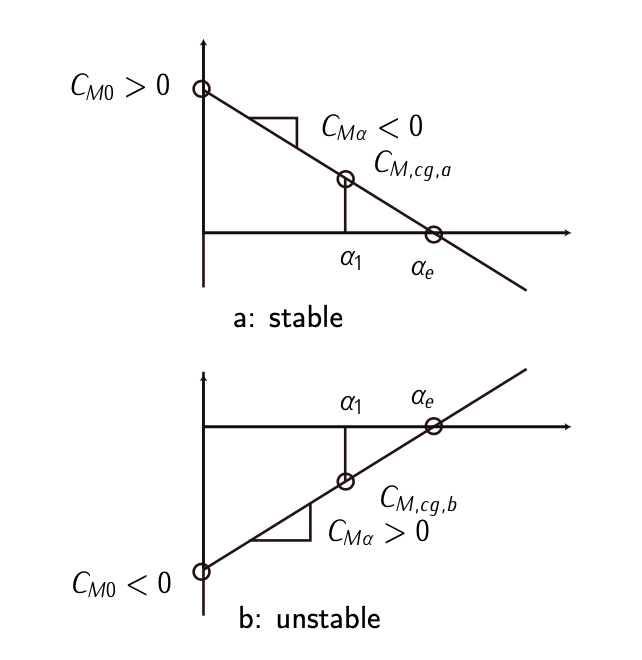
Figura 7.14: Estabilidad longitudinal. Adaptado de Franchini y García [3].
En la Figura 7.14 se muestra el coeficiente de momentos de dos aeronaves en función del ángulo de ataque para un centro de gravedad dado, un centro aerodinámico dado para ala y estabilizador horizontal, y una deflexión dada del elevador. La intersección de las curvas con el eje de abscisas determina el ángulo de ataque de equilibrio\(\alpha_e\). Imagínese que aparece una perturbación, por ejemplo una ráfaga de viento que disminuye el ángulo de ataque para que ambas aeronaves tengan un ángulo de ataque\(\alpha_1 < \alpha_e\). En el caso o aeronave (a), la\(c_{M,cg,b} > 0\) (la curva para\(\alpha_1\) está por encima del eje de abscisas), lo que significa que el momento tiende a inclinar hacia arriba la aeronave para que vuelva al estado inicial de equilibrio: la aeronave es estáticamente estable. En el caso o aeronave (b),\(c_{M,cg,b} < 0\) (la curva para\(\alpha_1\) está por debajo del eje de abscisas) y el momento tiende a inclinarse hacia abajo de la aeronave, de manera que es estáticamente inestable.
A partir de este razonamiento, podemos concluir que para que una aeronave sea estáticamente estable debe cumplirse:
\[\dfrac{dc_{M,cg}}{d\alpha} = c_{M\alpha} < 0.\]
\(c_{M\alpha}\)depende, entre otros, del centro de gravedad de la aeronave. Por lo tanto, una de las cuestiones clave en el diseño de una aeronave es determinar el centro de gravedad para que la aeronave sea estáticamente estable. Esto no es trivial, ya que el centro de gravedad varía durante el vuelo (depende de la carga útil, varía a medida que se quema el combustible, etc.). Por lo tanto, durante un vuelo el piloto (o el piloto automático en sistemas de control) debe modificar el ángulo de ataque para mantener el vuelo en el equilibrio (ya que\(\alpha_e\) varía). A medida que el centro de gravedad avanza hacia popa el ángulo de ataque de equilibrio aumenta. Hay un punto para el cual\(c_{M\alpha} = 0\), el punto neutral. El centro de gravedad no puede retroceder más allá de este punto de ninguna manera porque\(c_{M\alpha} > 0\) y la aeronave se vuelve estáticamente inestable.
Control longitudinal
El coeficiente\(c_{M\delta_e}\) es referido como la potencia del control longitudinal y representa una medida de la capacidad que tiene el elevador para generar un momento y, por lo tanto, para cambiar el ángulo de ataque al que la aeronave puede volar en equilibrio (\(\alpha_e\)).
La deflexión positiva de un elevador\((\delta_e > 0)\) genera un aumento en la elevación del estabilizador horizontal (\(\Delta L_t\)), lo que da lugar a un momento de paso negativo\(M_{cg} < 0\) (\(c_{M\delta_e} < 0\)). En la condición de equilibrio, la suma de momentos alrededor del centro de gravedad es nula, y por lo tanto debe cumplirse que
\[c_{M, cg} = c_{M0} + c_{M\alpha} \alpha + c_{M\delta_e} \delta_e = 0.\]
Se pueden derivar dos problemas principales en el control longitudinal:
- Determinar el ángulo de deflexión del elevador\(\delta_e\),, para poder volar en equilibrio en un ángulo de ataque dado,\(\alpha_e\):
\[\delta_e = \dfrac{-c_{M0} - c_{M\alpha} \alpha_e}{c_{M\delta_e}}\] -
Determinar el ángulo de ataque para volar en equilibrio\(\alpha_e\),, para una desviación conocida del elevador,\(\alpha_e\):
\[\alpha_e = \dfrac{-c_{M0} - c_{M\delta_e} \delta_e}{c_{M\alpha}}\]
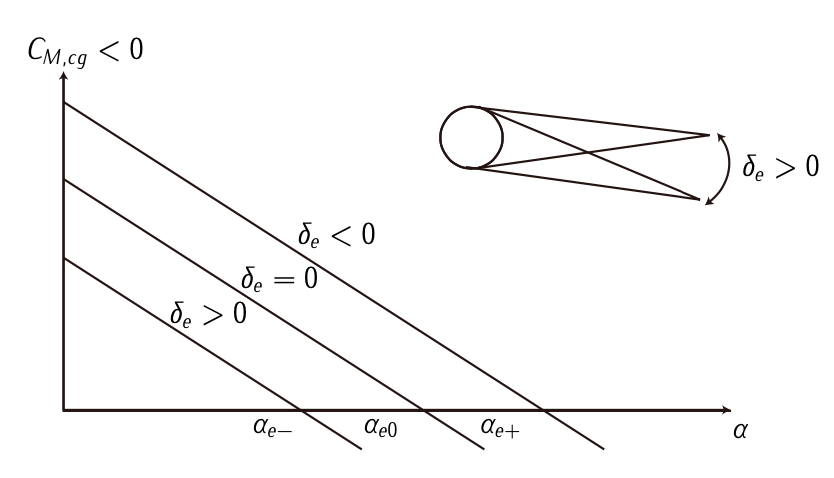
Figura 7.15: Efectos del elevador sobre el coeficiente de momentos. Adaptado de Franchini y García [3].
La Figura 7.15 muestra los efectos de la deflexión del elevador en el ángulo de ataque de equilibrio. Simplificando, para a\(\delta_e < 0\), el ángulo de ataque de equilibrio al que vuela la aeronave aumenta y también lo hace el coeficiente de sustentación. Dado que el levantamiento debe ser igual al peso, la aeronave debe volar más despacio. En otras palabras, el elevador se utiliza para modificar la velocidad de un vuelo horizontal estable.
Como hemos señalado anteriormente, la condición geométrica de la aeronave varía durante el vuelo. Por lo tanto, es necesario volver a calcular estas condiciones y modificar las variables continuamente. Esto se realiza utilizando sistemas de control.
7. Para ser más precisos, es necesario derivar un modelo que nos dé el ángulo de ataque efectivo del estabilizador ya que el ala modifica la corriente incidente. Sin embargo, esto se estudiará en cursos posteriores.
8. recordar que el centro aerodinámico es el punto en que con el momento de pitcheo no varía con respecto al incremento en\(C_L\).