
17.4: Una descripción más general
- Page ID
- 85798

Hay al menos dos razones para ir a una descripción del sistema más general que las mostradas hasta ahora. Primero, nuestra evaluación del rendimiento del sistema puede involucrar variables que no se encuentran entre las señales de salida medidas/realimentadas de la planta. Segundo, las perturbaciones que afectan al sistema pueden ingresar de formas más generales que las indicadas anteriormente. Todavía queremos que nuestra representación del sistema separe las partes del controlador del sistema (las\(K\)'s o\(K_{1}\),\(K_{2}\) de las figuras anteriores), ya que estas son las porciones que estaremos diseñando. En esta sección presentaremos una descripción general de la planta que organiza los diferentes tipos de entradas y salidas, y su interacción con un controlador. En la Figura 17.6 se muestra un diagrama de bloques para una descripción general de la planta.
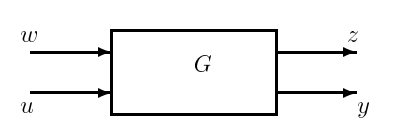
Figura\(\PageIndex{1}\): Descripción general de la planta.
Las diferentes señales en la Figura 17.6 se pueden clasificar de la siguiente manera.
Entradas
- Vector de entrada de control\(u\), que contiene las señales del actuador que accionan la planta y generadas por un controlador.
- Vector de entrada exógeno\(w\), que contiene todas las demás señales externas, como referencias y perturbaciones.
Salidas
- Vector de salida medido\(y\), que contiene las señales que están disponibles para el controlador. Estos se basan en las salidas de los dispositivos sensores, y forman la entrada al controlador.
- Vector de salida regulado\(z\), que contiene las señales que son importantes para la aplicación específica. Las salidas reguladas suelen incluir las señales del actuador, las señales de error de seguimiento y las variables de estado que deben manipularse.
Deje que la matriz de función de transferencia
\ [G=\ left [\ begin {array} {ll}
G_ {z w} & G_ {z u}\\
G_ {y w} & G_ {y u}
\ end {array}\ derecha]\ nonumber\]
tener la realización estado-espacio
\ [\ begin {array} {l}
\ punto {x} =A x+b_ {1} w+b_ {2} u\\
z=c_ {1} x+d_ {11} w+d_ {12} u\\
y=c_ {2} x+d_ {21} w+d_ {22} u
\ end {array}\ nonumber\]
Ejemplo 17.4
Consideremos el sistema de realimentación unitaria en la Figura 17.7, donde\(P\) es una planta SISO,\(K\) es un controlador escalar,\(y^{\prime}\) es la salida,\(u\) es la entrada de control,\(v\) es una señal de referencia, y\(d\) es una perturbación externa que es “conformada” por el filtro\(H\) antes de él se inyecta en la salida medida. El controlador es impulsado por la diferencia\(e=v-y^{\prime}\) (el “error de seguimiento”). Las señales\(v\) y se\(d\) pueden tomar para constituir la entrada exógena, por lo que
\ [w=\ left [\ begin {array} {l}
v\\
d
\ end {array}\ derecha]\ nonumber\]
En tal configuración normalmente queremos mantener el error de seguimiento\(e\) pequeño, y poner un costo en la acción de control. Por lo tanto, podemos tomar la salida regulada\(z\) para ser
\ [z=\ left [\ begin {array} {l}
e\\
u
\ end {array}\ derecha]\ nonumber\]
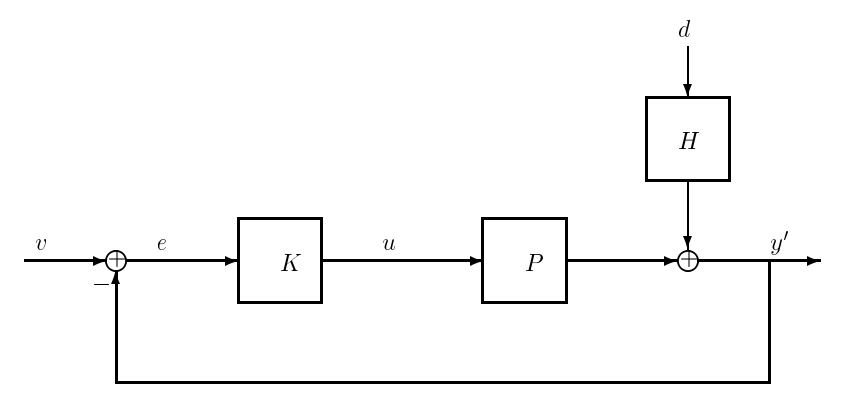
Figura\(\PageIndex{2}\): Ejemplo de un sistema de retroalimentación de unidad.
La entrada al controlador es\(e\), por lo tanto establecemos la salida medida\(y\) para que sea igual a\(e\). Con estas opciones, la función generalizada de transferencia de plantas\(G\), que se\(y\) relaciona\(z\) y con\(w\) y\(u\), se puede obtener de
\ [\ begin {array} {l}
z=\ left [\ begin {array} {c}
-P u-H d+v\\
u
\ end {array}\ right] =\ left [\ begin {array} {c}
-P\\
1
\ end {array}\ right] u+\ left [\ begin {array} {cc}
1 & -H\\
0 & 0
\ end {array}\ right] w\\
y=-p u+\ left [\ begin {array} {cc}
1 & -H
\ end {array}\ right] w
\ end {array}\ nonumber\]
Supongamos que\(P=\frac{1}{s-1}\) y\(H=\frac{1}{s+1}\). Entonces se obtiene fácilmente una realización estado-espacio de\(G\):
\ [\ begin {alineado}
\ frac {d} {d t}\ left [\ begin {array} {c}
x_ {1}\\
x_ {2}
\ end {array}\ right] &=\ left [\ begin {array} {cc}
1 & 0\\
0 & -1
\ end {array}\ right]\ left [\ begin {array} {c}
x_ {1}\\
x_ {2}
\ end {array}\ right] +\ left [\ begin {array} {cc}
0 & 0\\
0 & 1
\ end {array}\ right] w+\ left [\ begin {array} {c}
1\\
0
\ end {array}\ right] u\\
z &=\ left [\ begin { array} {cc}
-1 & -1\\
0 & 0
\ end {array}\ right]\ left [\ begin {array} {c}
x_ {1}\\
x_ {2}
\ end {array}\ right] +\ left [\ begin {array} {cc}
1 & 0\\
0 & 0
\ end {array}\ derecha] w+\ left [\ begin {array} {c}
0\\
1
\ end {array}\ right] u\\
y &=\ left [\ begin {array} {cc}
-1 & -1
\ end {array}\ right]\ left [\ begin {array} {c}
x_ {1}\\
x_ {2}
\ end { array}\ derecha] +\ left [\ begin {array} {cc}
1 & 0
\ end {array}\ right] w+0 u
\ end {alineado}\ nonumber\]
Si cerramos el bucle, la estructura general planta/controlador toma la forma que se muestra en la Figura 17.8.
La matriz de transferencia de planta\(G\) es una matriz de\(2 \times 2\) bloques que mapea las entradas\(w, u\) a las salidas\(z, y\), donde la parte de la planta que interactúa directamente con el controlador es justa\(G_{yu}\). El mapa (o función de transferencia) de interés en las especificaciones de rendimiento es el mapa de\(w\) a\(z\), denotado por\(\Phi\), y fácilmente visto para ser dado por la siguiente expresión:
\[\Phi=G_{z w}+G_{z u}\left(I-K G_{y u}\right)^{-1} K G_{y w} \ \tag{17.8}\]
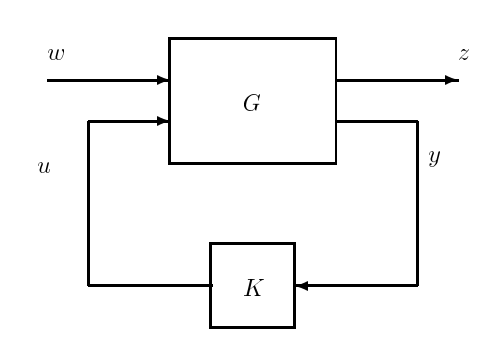
Figura\(\PageIndex{3}\): Una configuración general de retroalimentación
En este nuevo settup nos gustaría determinar bajo qué condiciones el sistema de bucle cerrado en la Figura 17.9 está bien planteado y externamente estable. Para estos fines inyectamos señales\(r\) y\(v\) como se muestra en la Figura 17.9, que es similar a lo que hicimos en los apartados anteriores. Tenga en cuenta que al definir las señales
\ [\ begin {array} {l}
r_ {1} =\ left (\ begin {array} {c}
w\\
r
\ end {array}\ right) & r_ {2} =\ left (\ begin {array} {c}
0\\
v
\ end {array}\ derecha)\\
y_ {1} =\ left (\ begin {array} {c}
z\\
y
\ end {array}\ right) & y_ {2} =\ left (\ begin {array} {c}
0\\
f\ end {array}
\ right)\ end {array}
\ end {array}\ nonumber\]
esta estructura es equivalente a la estructura de la Figura 17.5. Esto se ilustra en la Figura 17.10, con
\ [\ begin {array} {l}
H_ {1} =\ left [\ begin {array} {ll}
G_ {z w} & G_ {z u}\\
G_ {y w} & G_ {y u}
\ end {array}\ derecha]\
H_ {2} =\ left [\ begin {array} {l}
0\\
I
\ end {array}\ derecha] K\ left [\ begin {array} { ll}
0 & I
\ end {array}\ right] =\ left [\ begin {array} {ll}
0 & 0\\
0 & K
\ end {array}\ right]
\ end {array}\ nonumber\]
Esta interconexión está bien planteada si y solo si
\ [\ left (I-\ left (\ begin {array} {cc}
G_ {z w} (\ infty) & G_ {z u} (\ infty)\\
G_ {y w} (\ infty) & G_ {y u} (\ infty)
\ end {array}\ right)\ left (\ begin {array} {cc}
0 & 0\
0 & K (\ infty)
\ end {array}\ right)\ right)\ nonumber\]
es invertible. Esto es lo mismo que exigir que
\[\left(I-K(s) G_{y u}(s)\right)^{-1} \text{ or equivalently } \left(I- G_{y u}(s) K(s)\right)^{-1} \text{ exists and is proper }\nonumber\]
Las entradas en la Figura 17.9 están relacionadas con las señales\(z\),\(u\) y de la\(y\) siguiente manera:
\ [\ left [\ begin {array} {ccc}
I & -G_ {z u} & 0\\
0 & I & -K\\
0 & -G_ {y u} & I
\ end {array}\ right]\ left [\ begin {array} {l}
z\\
u\
y
\ end {array}\ right] =\ left [\ begin {array} { ccc}
G_ {z w} & 0 & 0\\
0 & I & K\\
G_ {y w} & 0 & 0
\ end {array}\ derecha]\ left [\ begin {array} {l}
w\\
r\
v
\ end {array}\ derecha]\ etiqueta {17.9}\]
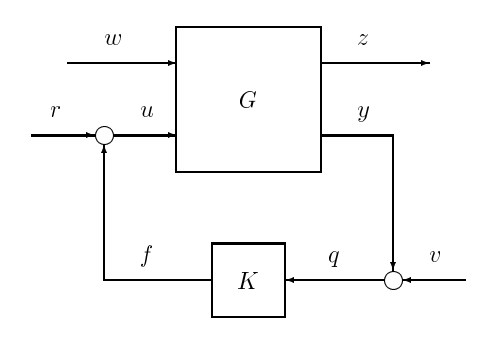
Figura\(\PageIndex{4}\): Una configuración de retroalimentación más general
Deje que el mapa\(\mathcal{T}(P, K)\) se defina de la siguiente manera:
\ [\ left (\ begin {array} {l}
z\\
u\
y
\ end {array}\ right) =\ mathcal {T} (P, K)\ left (\ begin {array} {l}
w\\
r\
v
\ end {array}\ derecha)\ nonumber\]
El sistema interconectado es externamente\(p\) -estable si el mapa de\(r_{1}, r_{2}\) a\(y_{1}, y_{2}\) es\(p\) -estable, ver Figura 17.10. Esto equivale a requerir que el mapa\(\mathcal{T}(P, K)\) sea\(p\) -estable.