
11.5: Diagramas de bloques y funciones de transferencia de sistemas de retroalimentación
- Page ID
- 84155

Diagramas de Bloque: Forma Fundamental
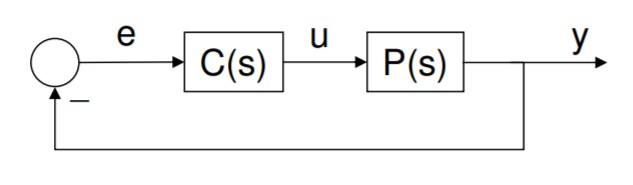
La topología de un sistema de retroalimentación se puede representar gráficamente considerando que cada elemento dinámico del sistema reside dentro de una caja, teniendo una línea de entrada y una línea de salida. Por ejemplo, una masa simple impulsada por una fuerza controlada tiene función de transferencia\(P(s) = 1/ms^2\), que relaciona la entrada, fuerza\(u(s)\), en la salida, posición\(y(s)\). A su vez, el controlador PD (ver abajo) tiene función de transferencia\(C(s) = k_p + k_d s\); su entrada es la señal de error\(e(s) = -y(s)\), y su fuerza de salida es\(u(s) = -(k_p + k_d s)y(s).\) Este bucle de retroalimentación en forma de diagrama de bloques se muestra a continuación.
.png)
Diagramas de Bloques: Caso General
El sistema de retroalimentación simple anterior se ve incrementado en la práctica por tres entradas externas. El primero es una perturbación del proceso que llamamos\(d\), que se puede tomar para actuar en la entrada de la planta física, o en la salida. En el primer caso, es aditivo con la acción de control, y así tiene algún significado físico. En el segundo caso, la perturbación tiene las mismas unidades que la producción de la planta.
Otra entrada externa es el comando de referencia o punto de ajuste, utilizado para crear una señal de error más general\(e(s) = r(s)-y(s).\) Tenga en cuenta que el bucle de retroalimentación, al intentar forzar\(e(s)\) a cero, necesariamente hará\(y(s)\) aproximado\(r(s).\)
La entrada final es el ruido del sensor\(n\), que generalmente corrompe la señal de retroalimentación\(y(s)\), causando algún error en la evaluación de\(e(s)\), y así sucesivamente. Los sensores con muy malas propiedades de ruido pueden arruinar el rendimiento de un sistema de control, sin importar cuán perfectamente entendidos sean los demás componentes.
Tenga en cuenta que las perturbaciones\(d_u\) y\(d_y\), y el ruido\(n\) son generalizaciones sobre la perturbación desconocida y el ruido del sensor que discutimos al inicio de esta sección.
.png)
Funciones de transferencia
Algún álgebra aplicada a la figura anterior (y descuidando la variable de Laplace\(s\)) muestra que
\ begin {align}\ frac {e} {r}\,\, &=\,\,\ frac {1} {1 + PC}\,\, =\,\, S\ [4pt]\ frac {y} {r}\,\, &=\,\,\ frac {PC} {1 + PC}\,\, =\, T\ [4pt]\ frac {u} {r}\,\, &=\,\,\ frac {C} {1 + CP}\,\, =\,\, U.\ end {align}
Derivamos el primero de estos. Trabajando directamente desde la figura, tenemos
\ begin {alinear*} e (s)\,\, &=\,\, r (s) - y (s)\\ [4pt] e (s)\,\, &=\,\, r (s) - P (s) u (s)\\ [4pt] e (s)\,\, &=\,\, r (s) - P (s) C (s)) e (s)\\ [4pt] (1 + P (s) C (s)) e (s)\,\, &=\,\, r (s)\\ [4pt]\ frac {e (s)} {r (s)}\,\, &=\,\,\ frac {1} {1 + P (s) C (s)}. \ end {alinear*}
El hecho de que seamos capaces de hacer este tipo de construcción es una consecuencia directa de la representación del sistema en el dominio de la frecuencia, y es decir, que podemos multiplicar y dividir libremente las respuestas y señales de impulso del sistema, para representar convoluciones en el dominio del tiempo.
Ahora\(e/r = S\) relaciona la entrada de referencia y el ruido con el error, y se conoce como la función de sensibilidad. Generalmente nos gustaría ser pequeños\(S\) a ciertas frecuencias, de modo que el error de seguimiento no dimensional\(e/r\) allí sea pequeño. \(y/r = T\)se llama la función de sensibilidad complementaria. Obsérvese eso\(S+T = 1\), implicando que estas dos funciones siempre deben negociar; ambas no pueden ser pequeñas o grandes al mismo tiempo. Otros sistemas que encontramos de nuevo más tarde son la función de transferencia de bucle (hacia adelante)\(PC\); la función de transferencia de bucle rota entre\(C\) y\(P\), a saber\(CP\); y algunos otros:
\ begin {align}\ frac {e} {d_u}\,\, &=\,\,\ frac {-P} {1 + PC}\\ [4pt] [4 pt]\ frac {y} {d_u}\,\, &=\,\,\ frac {P} {1 + PC}\\ [4pt] [4 pt]\ frac {u} {d_u}\,\, &=\,\,\ frac {-CP} {1 + CP}\\\ [4pt] [4 pt]\ frac {e} {d_y}\,\, &=\,\,\ frac {-1} {1 + PC}\,\, =\,\, -S\ [4pt] [4 pt]\ frac {y} d_y}\,\, & amp; =\,\,\ frac {1} {1 + PC}\,\, =\,\, S\\ [4pt] [4 pt]\ frac {u} {d_y}\,\, &=\,\,\ frac {-C} {1 + CP}\,\, =\,\, -U\\ [4pt] [4 pt]\ frac {e} {n}\,\, &=\,\,\ frac {-1} {1 + PC}\,\, =\,\, -S\ [4pt] [4 pt] [4 pt]\ frac {y} {n}\,\, &=\,\,\ frac {-PC} {1 + PC}\,\, =\,\, -T\ [4pt] [4 pt]\ frac {u} {n} \,\, &=\,\,\ frac {-C} {1 + CP}\,\, =\,\, -U. \ end {align}
Si la perturbación se toma a la salida de la planta, entonces las tres funciones\(S\)\(T\), y\(U\) (acción de control) describen completamente el sistema. Este será el procedimiento cuando abordemos loopforma.