
2.3: Grados de libertad
- Page ID
- 85055

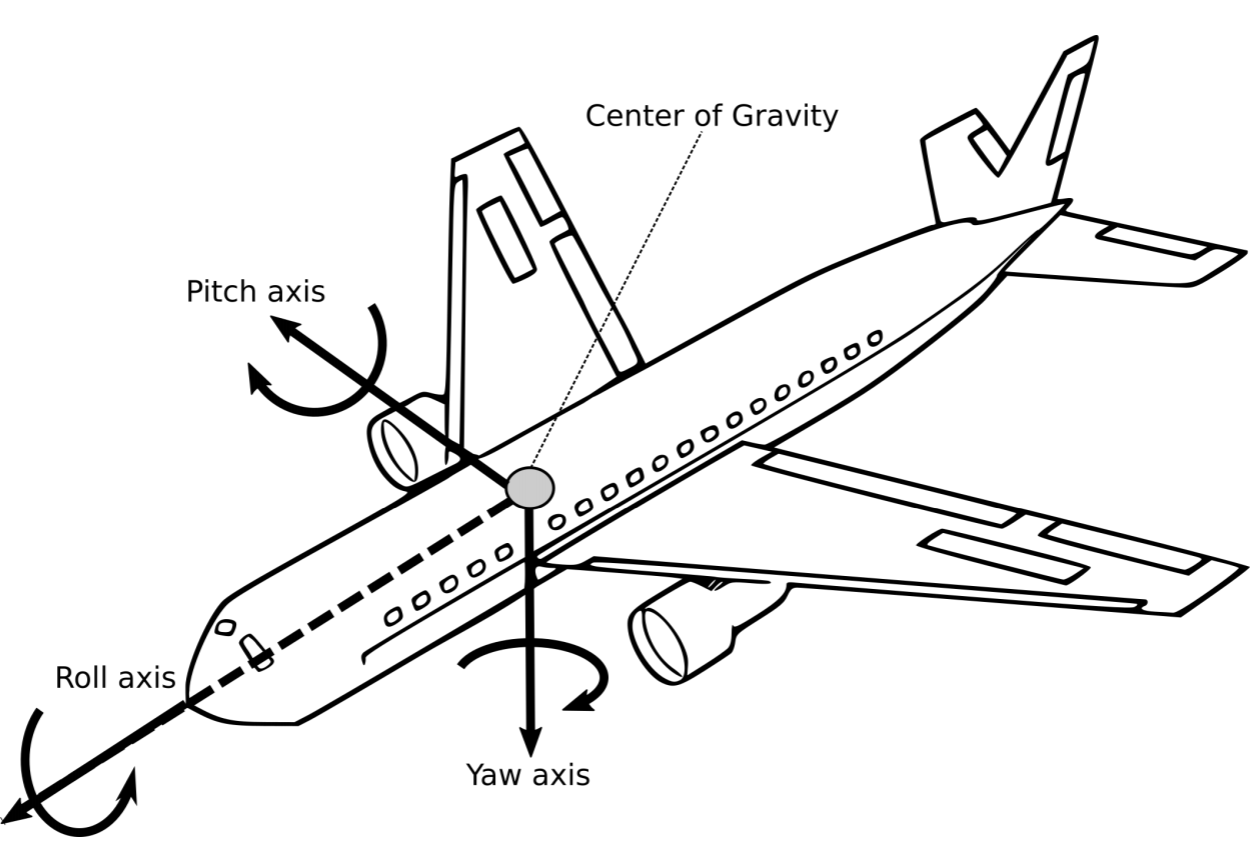
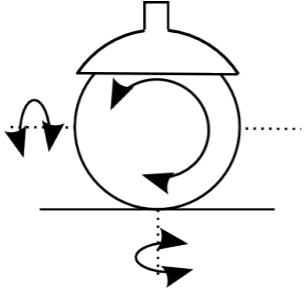
El concepto de grados de libertad, a menudo abreviado como DOF, es importante para definir las posibles posiciones y orientaciones que puede alcanzar un robot. Un objeto en el mundo físico puede tener hasta seis grados de libertad, es decir, adelante/atrás, lateral y arriba/abajo, así como rotaciones alrededor de esos ejes. Estas rotaciones se conocen como cabeceo, guiñada y balanceo y se ilustran en la Figura 2.3.1.
La cantidad de esas direcciones en las que puede moverse un robot depende de la configuración de sus actuadores y de las limitaciones que tenga el robot con el entorno. Estas relaciones no siempre son intuitivas y requieren un tratamiento matemático más riguroso (Capítulo 3). El objetivo de esta sección es introducir los grados de libertad de los mecanismos estándar que son recurrentes en el diseño de robots como ruedas o brazos simples. Para las plataformas con ruedas, los grados de libertad se definen por los tipos de ruedas utilizadas y su orientación. Los tipos de ruedas comunes se enumeran en la Tabla 2.3.1.
Solo los robots que utilicen exclusivamente ruedas con tres grados de libertad (ruedas 3-DOF) podrán moverse libremente en un avión. Esto se debe a que la pose de un robot en un plano viene dada completamente por su posición (dos valores) y su orientación (un valor). Los robots que no tengan ruedas con tres grados de libertad tendrán restricciones cinemáticas que les impidan llegar a todos los puntos posibles en cada orientación posible. Por ejemplo, una rueda de bicicleta solo puede rodar en una dirección y girar en el lugar. No es posible mover la rueda de bicicleta ortogonal a su dirección de rodadura, a menos que sea arrastrada con fuerza (“derrapando”), lo que requiere un tratamiento más involucrado no cubierto en este libro. Por otro lado, no tener tres grados de libertad no significa que no se puedan alcanzar todas las poses en el plano. Un buen análogo son las figuras en un tablero de juego. Por ejemplo, un caballero puede llegar a todas las celdas de un tablero de juego pero puede requerir múltiples movimientos para hacerlo. Esto es similar a un automóvil, que puede estacionarse en paralelo usando movimientos de ida y vuelta. En cambio, un obispo sólo puede llegar a campos negros o blancos en el tablero.
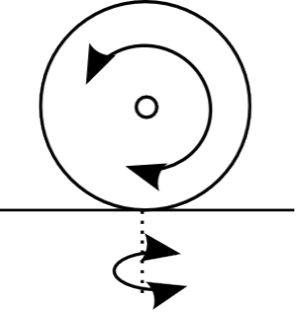
| Tipo de Rueda | Ejemplo | Grados de libertad |
|
Estándar
|
Rueda delantera de una carretilla |
Dos
|
|
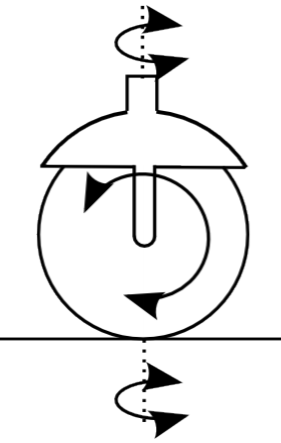
Rueda giratoria
|
Silla de oficina |
Tres
|
|
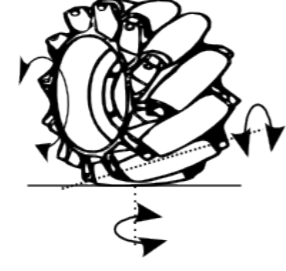
Rueda sueca
|
Rueda estándar con rodillos no accionados alrededor de su circunferencia |
Tres
|
|
Rueda esférica
|
Rodamiento de bolas |
Tres
|
Mesa\(\PageIndex{1}\): Diferentes tipos de ruedas y sus grados de libertad. Adoptada de Siegwart et al. (2011),
Razonamiento similar se aplica a los robots aéreos y submarinos. Aquí, la posición del robot se ve afectada por la posición y orientación de los propulsores, ya sea en forma de chorros o hélices, montados en el robot. Las cosas se complican rápidamente, sin embargo, ya que la dinámica del sistema está sujeta a efectos fluidoy aerodinámicos, que también cambian en función del tamaño del robot. Este libro no entrará en los detalles de los robots voladores y nadadores, pero también les serán aplicables los principios generales de localización y planeación.
Consulta
Piense en las posibles configuraciones de rueda, hélice y propulsor. No te limites a los robots, sino que considera también los vehículos callejeros y aéreos y sé creativo —si puedes pensar en una configuración que tenga sentido, es decir, que permita una movilidad razonable— alguien ya la habrá construido y analizado. ¿Cuáles son las ventajas y desventajas de cada uno?
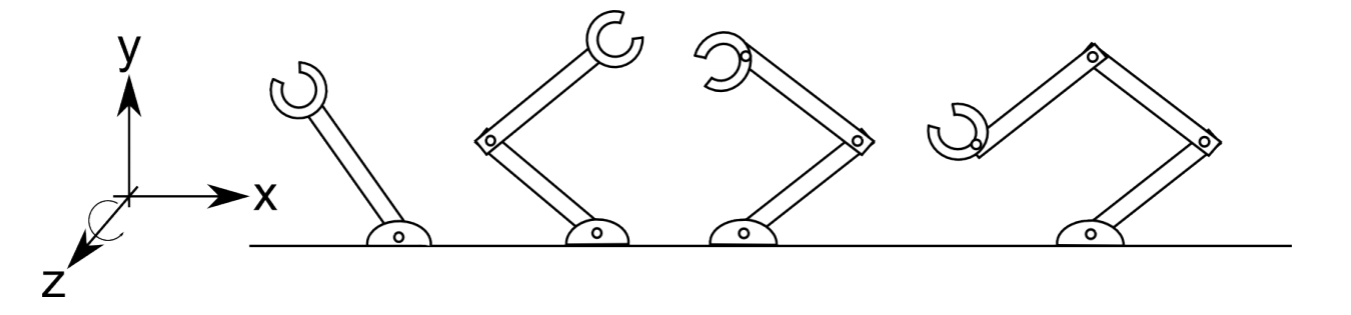
Para manipular los brazos, los grados de libertad generalmente se refieren a las posiciones y orientaciones, es decir, rotaciones alrededor de los ejes primarios, el efector final puede alcanzar. Como regla general, cada articulación suele agregar un grado de libertad a menos que sean redundantes, es decir, moviéndose en la misma dirección. La Figura 2.4 muestra una serie de manipuladores que operan en un plano. Por esto, los grados de libertad del efector final se limitan a moverse hacia arriba y hacia abajo, hacia los lados y girar alrededor de su punto de pivote. Como un avión solo tiene esos tres grados de libertad, agregar juntas adicionales no puede aumentar los grados de libertad a menos que permitan que el robot también se mueva dentro y fuera del avión.
Una definición exacta del número de grados de libertad es complicada y requiere derivar expresiones analíticas para la posición y orientación del endfector, que estarán sujetas al Capítulo 3.
Elegir la cinemática “correcta” es una compensación entre la complejidad mecánica, la maniobrabilidad, la precisión alcanzable, el costo y la facilidad de control. La muy popular tracción diferencial que consta de dos ruedas controladas independientemente que comparten un eje común como en el iRobot Roomba es barata, altamente maniobrable y fácil de controlar, pero dificulta la conducción en línea recta. Esto requiere que ambos motores giren exactamente a la misma velocidad y que ambas ruedas tengan exactamente el mismo diámetro, lo cual es difícil de lograr en la práctica. Este problema se resuelve bien con mecanismos de dirección similares a automóviles, pero tienen poca maniobrabilidad y son difíciles de controlar (piense en estacionamientos paralelos).