
2.2: Una braga plana pequeña


- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Volvemos una vez más al problema de pruebas biaxiales, introducido en el módulo de truss uniaxial. Resulta que las matrices singulares son típicas en el problema de las pruebas biaxiales. Como nuestro primer paso en el mundo de tales estructuras planas, consideremos el truss simple en la figura de un simple swing.
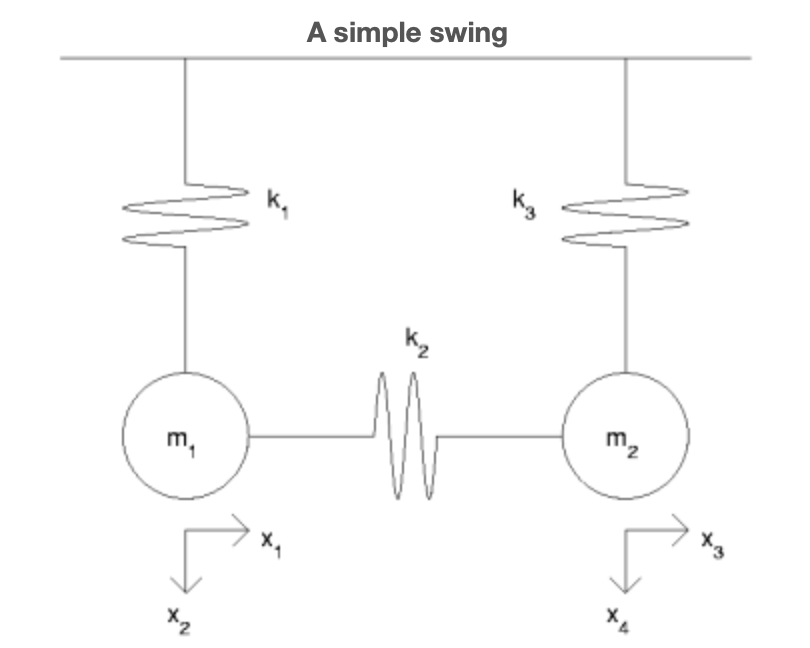
Denotamos porx1 yx2 los respectivos desplazamientos horizontales y verticales dem1 (positivo es derecho y abajo). De igual manera,f1 yf2 denotará los componentes asociados de la fuerza. Los desplazamientos y fuerzas correspondientes am2 serán denotados porx3,x4 yf3,f4 Al calcular los alargamientos de los tres muelles haremos referencia a sus longitudes no estiradas,L1,L2 yL3
Ahora, si el resorte 1 se conecta{0,−L1} a{0,1} cuando está en reposo y{0,−L1} a{x1,x2} cuando se estira, entonces su elongación es simplemente
e1=√2x21+(x2+L1)2−L1
El precio que uno paga por pasar a dimensiones más altas es que las longitudes ahora se expresan en términos de raíces cuadradas. El resultado es que los alargamientos no son combinaciones lineales de los desplazamientos finales como lo fueron en el caso uniaxial. Si presumimos, sin embargo, que las cargas y rigideces están emparejadas en el sentido de que los desplazamientos son pequeños en comparación con las longitudes originales, entonces podemos ignorar efectivamente la contribución no lineal en la ecuación. Para hacer esto preciso solo necesitamos recordar el desarrollo Taylor de la raíz cuadrada de(1+t)
El desarrollo de Taylor de√21+t aproximadamentet=0 es
√21+t=1+t2+O(t2)
donde este último término significa el resto.
Con respecto ae1 esto permite
e1=√2x21+x22+2x2L1+L21−L1
=L1√21+x21+x22L21+2x2L1−L1
e1=L1+x21+x222L21+x2+L1O((x21+x22L21+2x2L1)2)−L1
=x21+x222L21+x2+L1O((x21+x22L21+2x2L1)2)
Si ahora asumimos que
x21+x22L21es pequeño en comparación conx2
entonces, como el término O es aún menor, podemos descuidar todos menos los primeros términos en lo anterior y así llegar a
e1=x2
Para tomar un ejemplo concreto, siL1 es un metro yx1 yx2 son cada uno un centímetro, entoncesx2 es cien vecesx21+x22L21.
Con respecto al segundo resorte, argumentando lo anterior, su elongación es (aproximadamente) su estiramiento a lo largo de su dirección inicial. Como su dirección inicial es horizontal, su alargamiento es solo la diferencia de los respectivos desplazamientos finales horizontales, a saber,
e2=x3−x1
Finalmente, el alargamiento del tercer resorte es (aproximadamente) la diferencia de sus respectivos desplazamientos extremos verticales, es decir,
e3=x4
Codificamos estos tres alargamientos en
e=AxwhereA=(0100−10100001)
La Ley de Hooke [1]es una pieza elemental de la física y no se ve perturbada por nuestro salto de estructuras uniaxiales a biaxiales. El resultado es que la fuerza restauradora en cada resorte sigue siendo proporcional a su elongación, es decir,yj=kjej dondekj está la rigidez del muelle j. En términos matriciales,
y=KewhereK=(k1000k2000k3)
Equilibrar las fuerzas horizontales y verticales enm1 trae
(−y2)−f1=0
y
y1−f2=0
mientras que el equilibrio de las fuerzas horizontales y verticales enm2 trae
y2−f3=0
y
y3−f4=0
Los ensamblamos en
By=fwhere(0−10100010001)
y reconocer, como era de esperar, que BB no es más queAT. Al juntar las piezas, encontramos quex deben satisfacerSx=f donde
S=ATKA=(k20−k200k100−k20k20000k3)
Aplicar un paso de Eliminación Gaussiana trae
(k20−k200k1000000000k3)(x1x2x3x4)=(f1f2f1+f3f4)
y la sustitución posterior entrega
x4=f4k3
0=f1+f3
x2=f2k1
x1−x3=f1k2
El segundo de estos es notable en el sentido de que no contiene componentes dex. En cambio, proporciona una condición sobref. En términos mecánicos, establece que no puede haber equilibrio a menos que las fuerzas horizontales sobre las dos masas sean iguales y opuestas. Por supuesto, se podría haber observado esto directamente desde el trazado de la armadura. En las estructuras modernas tridimensionales con miles de miembros destinados a albergar o transmitir a los humanos no se debe, sin embargo, estar satisfecho con la integridad `visual' de la estructura. En particular, se desea una descripción detallada de todas las cargas que pueden, y, especialmente, todas las cargas que no pueden, ser equilibradas por el truss propuesto. En términos algebraicos, dada una matrizS, se desea una caracterización de
- todos aquellosf para los queSx=f posee una solución
- todos aquellosf para los queSx=f no posee una solución
Eventualmente proporcionaremos tal caracterización en nuestra discusión posterior sobre el espacio de columna de una matriz.
Suponiendo ahora quef1+f3=0 observamos que aunque el sistema anterior es consistente aún no logra determinar de manera única los cuatro componentes dex. En particular, especifica solo la diferencia entrex1 yx3 Como resultado ambos
x=(f1k2f2k10f4k3)andx=(0f2k1−f1k2f4k3)
satisfacerSx=f
(1010)
y aún así tener una solución deSx=f. Buscando la fuente de esta falta de singularidad observamos algunas redundancias en las columnas de S. En particular, la tercera es simplemente lo contrario de la primera. Como es S simplementeATKA, donde de nuevo, las columnas primera y tercera son opuestas. Estas redundancias están codificadasz en el sentido de que
Az=0
Interpretando esto en términos mecánicos, vemosz como un desplazamiento yAz como el alargamiento resultante. En
Az=0
vemos un desplazamiento distinto de cero produciendo elongación cero. Se dice en este caso que el truss se deforma sin hacer ningún trabajo y habla de elloz como un modo inestable. Nuevamente, este modo podría haberse observado con una simple mirada a la Figura. Tal no es el caso de estructuras más complejas y así el ingeniero busca un medio sistemático por el cual se puedan identificar todos los modos inestables. Veremos más adelante que todos estos modos son capturados por el espacio nulo deA.
Desde
Sz=0
se deduce fácilmente queS es singular. Más precisamente, siS−1 existieran entoncesS−1Sz equivaldríaS−10 i.e.z=0, contrario a la Ecuación. Como resultado, Matlab fallará en resolverSx=f incluso cuandof sea una fuerza que el truss pueda equilibrar. Una salida es usar la pseudo-inversa, como veremos en el módulo de Truss Planal General.