
5.6: Comportamiento asintótico de sistemas dinámicos lineales de tiempo discreto
- Page ID
- 115775
Uno de los principales objetivos del modelado basado en reglas es hacer predicciones del futuro. Entonces, es una pregunta natural preguntarse a dónde irá eventualmente el sistema a largo plazo (infinito). A esto se le llama el comportamiento asintótico del sistema cuando el tiempo se lleva al infinito, lo que resulta ser completamente predecible si el sistema es lineal.
Dentro del alcance de los modelos discretos de tiempo, los sistemas dinámicos lineales son sistemas cuya dinámica puede describirse como:
\[x_{t}=Ax_{t-1}, \label{(5.33)} \]
donde\(x\) es el vector de estado del sistema y\(A\) es la matriz de coeficientes. Técnicamente, también podría agregar un vector constante al lado derecho, como
\[x_{t} =Ax_{t-1} +a, \label{(5.34)} \]
pero esto siempre se puede convertir en una forma libre de constantes añadiendo una dimensión más, es decir,
\[y_{t}=\begin{pmatrix} x_{t}\\ 1 \end{pmatrix}=\begin{pmatrix} A &a \\ 0&1 \end{pmatrix} =\begin{pmatrix} x_{t-1} \\1 \end{pmatrix}= By_{t-1}\label{(5.35)} \]
Por lo tanto, podemos estar seguros de que la forma libre de constantes de Equati) on\ ref {(5.33} cubre todos los posibles comportamientos de ecuaciones de diferencia lineal.
Obviamente, la Ecuación\ ref {(5.33)} tiene la siguiente solución de forma cerrada:
\[x_{t} =A^{t}x_{0} \label{(5.36)} \]
Esto es simplemente porque\(A\) se multiplica al vector\(x\) de estado desde la izquierda en cada paso de tiempo. Ahora la pregunta clave es esta: ¿Cómo se comportará la Ec. (5.1.3) cuándo\(t → ∞\)? Al estudiar esto, la función exponencial de la matriz\(A_{t}\),, es una molestia. Tenemos que convertirlo en una forma más manejable para entender qué pasará con este sistema a medida que\(t\) se haga más grande. Y aquí es donde los valores propios y los vectores propios de la matriz\(A\) vienen a jugar un papel muy importante. Solo para recapitular, los valores propios\(λ_{i}\) y los vectores propios\(v_{i}\) de\(A\) son los escalares y vectores que satisfacen
\[Av_{i}=\lambda_{i}v_{1}. \label{(5.37)} \]
Es decir, arrojar a una matriz uno de sus vectores propios “destruirá la matriz” y la convertirá en un mero número escalar, que es el valor propio que corresponde al autovector utilizado. Si aplicamos repetidamente esta técnica de “neutralización matricial”, obtenemos
\[A^{t}v_{i} = A^{t-1}\lambda_{i}v_{i} =A^{t-2}\lambda^{2}_{i}v_{i}=...=\lambda^{t}_{i}v_{i} \label{(5.38)} \]
Esto parece prometedor. Ahora, solo necesitamos aplicar la simplificación anterior a la Ecuación\ ref {(5.36)}. Para ello, necesitamos representar el estado inicial\(x_{0}\) usando\(A\) los vectores propios como vectores base, es decir,
\[x_{0} = b_{1}v_{1} + b_{2}v_{2} + \ldots + b_{n}v_{n}, \label{(5.39)} \]
donde n es la dimensión del espacio de estado (es decir,\(A\) es una\(n×n\) matriz). La mayoría de\(n×n\) las matrices del mundo real son diagonalizables y por lo tanto tienen vectores propios\(n\) linealmente independientes, así que aquí asumimos que podemos usarlas como vectores base para representar cualquier estado inicial\(x_{0}\) 2. Si reemplazas\(x_{0}\) con esta nueva notación en la Ecuación\ ref {(5.36)}, obtenemos lo siguiente:
\[\begin{align}x_{t} & =A^{t}(b_{1}v_{1} +b_{2}v_{2} +... + b_{n}v_{n}) \label{(5.40)} \\[4pt]&=b_{1}A^{t}v_{1} +b_{2}A^{t}v_{2}+...+b_{n}A^{t}v_{n} \label{(5.41)} \\[4pt] &= b_{1}\lambda^{t}_{1}v_{1}+b_{2}\lambda^{t}_{2}v_{2}+...+b_{n}\lambda^{t}_{n}v_{n} \label{(5.42)} \end{align} \]
Este resultado muestra claramente que el comportamiento asintótico de xt viene dado por una suma de múltiples términos exponenciales de\(λ_{i}\). Hay competencias entre esos términos exponenciales, y qué término eventualmente dominará a los demás está determinado por el valor absoluto de\(λ_{i}\). Por ejemplo, si\(λ_{1}\). tiene el mayor valor absoluto\((|λ_{1}| > |λ_{2}|,|λ_{3}|,...|λ_{n}|)\), entonces
\[x_{t} =\lambda^{t}_{1}(b_{1}v_{1}+b_{2}(\frac{\lambda_{2}}{\lambda_{1}})^{t}v_{2}+....+b_{n}(\frac{\lambda_{n}}{\lambda_{1}})^{t}v_{n}\label{(5.43)} \]
\[\lim_{t \rightarrow \infty}\approx\lambda^{t}_{1}b_{1}v_{1}.\label{ (5.44)} \]
Este valor propio con el mayor valor absoluto se llama a\(dominant \ eigenvalue\), y su correspondiente vector propio se denomina vector propio dominante, que dictará en qué dirección (también conocida como modo en física) irá asintóticamente el estado del sistema. Aquí hay un dato importante sobre los sistemas dinámicos lineales:
Si la matriz de coeficientes de un sistema dinámico lineal tiene solo un valor propio dominante, entonces el estado del sistema apuntará asintóticamente a la dirección dada por su correspondiente autovector independientemente del estado inicial.
Esto puede considerarse una versión muy simple, trivial, lineal de la autoorganización. Veamos un ejemplo para entender mejor este concepto. Consideremos el comportamiento asintótico de la secuencia de Fibonacci:
\[x_{t} =x_{t-1} +x_{t-2}\label{(5.45)} \]
Como ya estudiamos, esta ecuación se puede convertir en el siguiente modelo bidimensional de primer orden:
\[x_{t}=x_{t-1} +y_{t-1}\label{(5.46)} \]
\[y_{t} =x_{t-1}\label{ (5.47)} \]
Esto se puede reescribir dejando\((x_{t},y_{t}) ⇒ x_{t}\) y usando una notación vector-matriz, como:
\[x_{t}=\binom{1 \ \ 1}{1 \ \ 0} x_{t-1}\label{(5.48)} \]
Entonces, solo necesitamos calcular los valores propios y los vectores propios de la matriz de coeficientes anterior para entender el comportamiento asintótico de este sistema. Los valores propios de una matriz se\(A\) pueden obtener resolviendo la siguiente ecuación para\(λ\):
\[\det\binom{1 -\lambda \ 1}{ 1 -\lambda} =-(1-\lambda)\lambda -1 =\lambda^{2} -\lambda-1 =0,\label{(5.50)} \]
lo que da
\[\lambda = \frac{1\pm\sqrt{5}}{2}\label{(5.51)} \]
como sus soluciones. ¡Ten en cuenta que uno de ellos\(((1 +√5)/2 = 1.618...)\) es la proporción áurea! Es interesante que la proporción áurea aparezca a partir de un sistema dinámico tan sencillo. Por supuesto, también puedes usar Python para calcular los valores propios y los vectores propios (o, para ser más precisos, sus valores aproximados). Haga lo siguiente:

La función eig está ahí para calcular los valores propios y los vectores propios de una matriz cuadrada. Inmediatamente obtienes los siguientes resultados:

La primera matriz muestra la lista de valores propios (seguramente incluye la proporción áurea), mientras que la segunda muestra la matriz de vectores propios (es decir, una matriz cuadrada cuyos vectores de columna son vectores propios de la matriz original). Los vectores propios se enumeran en el mismo orden que los autovalores. Ahora necesitamos interpretar este resultado. Los valores propios son 1.61803399 y -0.61803399. ¿Cuál es dominante? La respuesta es la primera, porque su valor absoluto es mayor que el del segundo, lo que significa que, asintóticamente, el comportamiento del sistema se ve así:
\[x_{t} \approx 1.61803399x_{t-1}\label{(5.52)} \]
A saber, el valor propio dominante nos dice la relación asintótica de magnitudes de los vectores de estado entre dos puntos de tiempo consecutivos (en este caso, se acerca a la proporción áurea). Si el valor absoluto del valor propio dominante es mayor que 1, entonces el sistema divergirá hasta el infinito, es decir, el sistema es inestable. Si es menor que 1, el sistema eventualmente se encogerá a cero, es decir, el sistema es estable. Si es precisamente 1, entonces el componente de vector propio dominante del estado del sistema se conservará sin divergencia ni convergencia, y así el sistema puede converger a un punto de equilibrio distinto de cero. La misma interpretación también se puede aplicar a los valores propios no dominantes.
Un valor propio nos dice si un componente particular del estado de un sistema (dado por su correspondiente vector propio) crece o se contrae con el tiempo. Para modelos de tiempo discreto:
•\(|λ| > 1\) significa que el componente está creciendo.
•\(|λ| < 1\) significa que el componente se está encogiendo.
•\(|λ| = 1\) significa que el componente está conservado
Para los modelos de tiempo discreto, el valor absoluto del valor propio dominante\(λ_{d}\) determina la estabilidad de todo el sistema de la siguiente manera:
•\(|λ_{d}| > 1\): El sistema es inestable, divergiendo al infinito.
•\(|λ_{d}| < 1\): El sistema es estable, convergiendo al origen.
•\(|λ_{d}| = 1\): El sistema es estable, pero se conserva el componente de vector propio dominante y, por lo tanto, el sistema puede converger a un punto de equilibrio distinto de cero
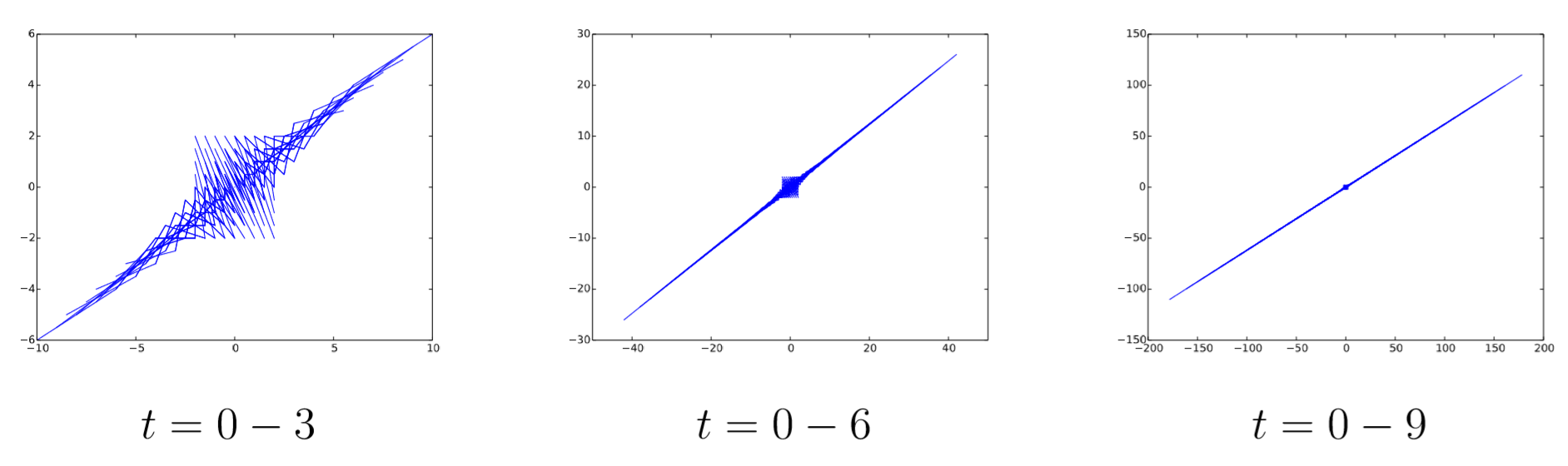
Ahora podemos observar el vector propio dominante que corresponde al valor propio dominante, que es (0.85065081, 0.52573111). Este vector propio te dice la dirección asintótica del estado del sistema. Es decir, después de un largo periodo de tiempo, el estado del sistema\((x_{t},y_{t})\) será proporcional a (0.85065081, 0.52573111), independientemente de su estado inicial. Confirmemos este resultado analítico con simulaciones por computadora.
Visualice el espacio de fase de la Ecuación\ ref {(5.48)}.
Los resultados se muestran en la Fig. 5.6.1, para 3, 6 y 9 pasos de simulación. Como se puede ver en la figura, las trayectorias del sistema divergen asintóticamente hacia la dirección dada por el autovector dominante (0.85065081, 0.52573111), como se predijo en el análisis anterior.
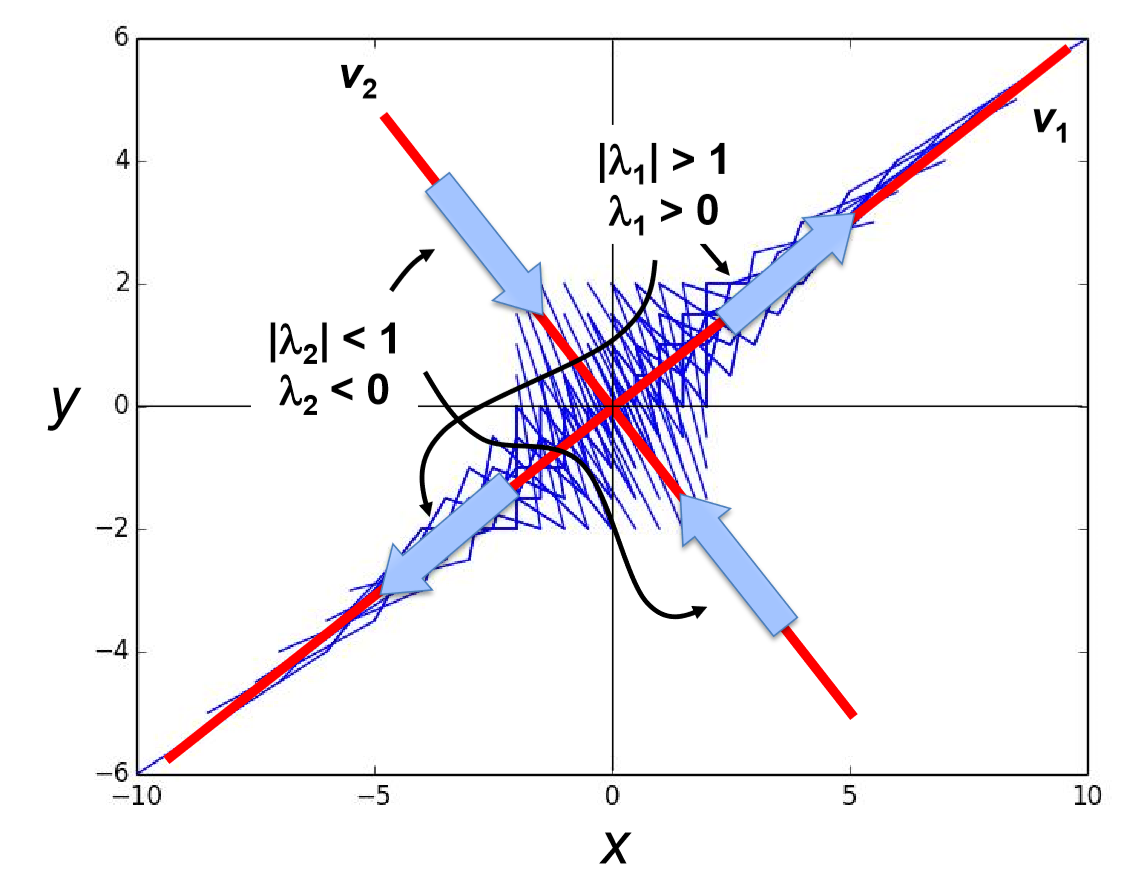
La Figura 5.6.2 ilustra las relaciones entre los valores propios, los vectores propios y el espacio de fase de un sistema dinámico de tiempo discreto. Los dos vectores propios muestran las direcciones de dos líneas invariantes en el espacio de fase (mostrado en rojo). Cualquier estado en cada una de esas líneas se mapeará en la misma línea. También hay un valor propio asociado a cada línea (\(λ_{1}\)y\(λ_{2}\) en la figura). Si su valor absoluto es mayor que 1, el componente de vector propio correspondiente del estado del sistema está creciendo exponencialmente ((\(λ_{1}\), (\(v_{1}\)), mientras que si es menor que 1, el componente se está reduciendo exponencialmente ((\(λ_{2}\),\(v_{2}\)). Además, para los modelos de tiempo discreto, si el valor propio es negativo, el componente de vector propio correspondiente alterna su signo con respecto al origen cada vez que se actualiza el estado del sistema (que es el caso de (\(λ_{2}\),\(v_{2}\) en la figura).
Aquí hay una perspectiva resumida para que entiendas la dinámica de los sistemas lineales:
Las dinámicas de un sistema lineal son descomponibles en múltiples dinámicas exponenciales unidimensionales independientes, cada una de las cuales tiene lugar a lo largo de la dirección dada por un vector propio. Una trayectoria general a partir de una condición inicial arbitraria se puede obtener mediante una simple superposición lineal de esas dinámicas independientes.
Una cosa más. En ocasiones se puede encontrar que algunos valores propios de una matriz de coeficientes son complejos conjugados, no reales. Esto puede suceder solo si la matriz es asimétrica (es decir, las matrices simétricas siempre tienen solo valores propios reales). Si esto sucede, los vectores propios también toman valores complejos, lo que significa que no hay líneas invariantes en el espacio de fase. Entonces, ¿qué está pasando ahí? La respuesta es la rotación. Como recuerdas, los sistemas lineales pueden mostrar comportamientos oscilatorios, que son rotaciones en su espacio de fase. En tales casos, sus matrices de coeficientes tienen valores propios conjugados complejos. El significado de los valores absolutos de esos valores propios complejos sigue siendo el mismo que antes, mayor que 1 significa inestabilidad y menos de 1 significa estabilidad. Aquí hay un resumen:
Si la matriz de coeficientes de un sistema lineal tiene valores propios conjugados complejos, el estado del sistema gira alrededor del origen en su espacio de fase. El valor absoluto de esos valores propios conjugados complejos aún determina la estabilidad del sistema, de la siguiente manera:
•\(|λ| > 1\) significa rotación con una amplitud expansiva.
•\(|λ| < 1\) significa rotación con una amplitud que se encoge.
• |\(λ| = 1\) significa rotación con una amplitud sostenida.
Aquí un ejemplo de tales sistemas giratorios, con coeficientes tomados del Código 4.13.

El resultado es el siguiente:

Ahora vemos la unidad compleja j (sí, Python usa j en lugar de i para representar la unidad imaginaria i) en el resultado, lo que significa que este sistema está mostrando oscilación. Además, se puede calcular el valor absoluto de esos valores propios:

Entonces el resultado es el siguiente:

Esto significa que\(|λ|\) es esencialmente 1, lo que indica que el sistema muestra oscilación sostenida, como se ve en la Fig. 4.4.2. Para sistemas de dimensiones superiores, varios tipos de valores propios pueden aparecer de manera mixta; algunos de ellos pueden mostrar crecimiento exponencial, algunos pueden mostrar decaimiento exponencial y otros pueden mostrar rotación. Esto significa que todos esos comportamientos están ocurriendo de manera simultánea e independiente en el sistema. Una lista de todos los valores propios se llama el espectro de valores propios del sistema (o simplemente espectro para abreviar). El espectro de valores propios lleva mucha información valiosa sobre el comportamiento del sistema, pero a menudo, la información más importante es si el sistema es estable o no, lo que se puede obtener del valor propio dominante.
Estudiar el comportamiento asintótico del siguiente modelo de ecuación de diferencia tridimensional calculando sus valores propios y vectores propios:
\[x_{t} = x_{t-1} -y_{t-1}\label{(5.53)} \]
\[y_{t} =-x_{t-1} -3y_{t-1} +z_{t-1}\label{(5.54)} \]
\[z_{t} =y_{t-1} +z_{t-1}\label{(5.55) } \]
Considerar la dinámica de difusión de opiniones entre cinco personas sentadas en una estructura en forma de anillo. Cada individuo está conectado con sus dos vecinos más cercanos (es decir, izquierdo y derecho). Inicialmente tienen opiniones aleatorias (representadas como números reales aleatorios), pero en cada paso de tiempo, cada individuo cambia su opinión al promedio local en su barrio social (es decir, su propia opinión más la de sus dos vecinos, divididos por 3). Anote estas dinámicas como una ecuación de diferencia lineal con cinco variables, luego estudie su comportamiento asintótico calculando sus valores propios y vectores propios.
¿Qué pasa si un sistema lineal tiene más de un valor propio dominante y de valor real? ¿Qué implica para la relación entre la condición inicial y el comportamiento asintótico del sistema?
2 Esta suposición no se aplica a matrices defectuosas (no diagonalizables) que no tienen vectores propios\(n\) linealmente independientes. Sin embargo, tales casos son bastante raros en aplicaciones del mundo real, ya que cualquier perturbación arbitrariamente pequeña añadida a una matriz defectuosa la haría diagonalizable. Los problemas con propiedades sensibles y de mal comportamiento a veces se denominan patológicos en matemáticas y física. Para obtener más detalles sobre la diagonalizabilidad matricial y otras cuestiones relacionadas, mire los libros de texto de álgebra lineal, por ejemplo [28].