
5.7:5.7 Análisis de Estabilidad Lineal de Sistemas Dinámicos No Lineales de Tiempo Discreto
- Page ID
- 115801
Todas las discusiones anteriores sobre valores propios y vectores propios son para sistemas dinámicos lineales. ¿Podemos aplicar la misma metodología para estudiar el comportamiento asintótico de sistemas no lineales? Desafortunadamente, la respuesta es un no deprimente. Los comportamientos asintóticos de los sistemas no lineales pueden ser muy complejos, y no existe una metodología general para analizarlos y predecirlos sistemáticamente. Volveremos a examinar este número más adelante.
Dicho esto, todavía podemos usar valores propios y vectores propios para realizar un análisis de estabilidad lineal de sistemas no lineales, que es un método analítico para determinar la estabilidad del sistema en o cerca de su punto de equilibrio aproximando su dinámica alrededor de ese punto como una dinámica lineal sistema (linealización). Si bien el análisis de estabilidad lineal no dice mucho sobre el comportamiento asintótico de un sistema en general, sigue siendo muy útil para muchas aplicaciones prácticas, porque las personas a menudo están interesadas en cómo mantener el estado de un sistema en o cerca de un equilibrio deseado, o tal vez cómo interrumpir el status quo del sistema para inducir un cambio fundamental. La idea básica del análisis de estabilidad lineal es reescribir la dinámica del sistema en términos de una pequeña perturbación añadida al punto de equilibrio de su interés. Aquí pongo énfasis en la palabra “pequeño” por una razón. Cuando decimos pequeña perturbación en este contexto, nos referimos no solo a pequeños sino realmente, realmente pequeños (infinitesimalmente pequeños en términos matemáticos), tan pequeños que podemos ignorar con seguridad su cuadrado o cualquier término de orden superior. Esta operación es de lo que se trata la linealización. Así es como funciona el análisis de estabilidad lineal. Consideremos la dinámica de una ecuación de diferencia no lineal
\[x_t =F(x_{t-1}) \label{(5.56)} \]
alrededor de su punto de equilibrio\(x_{eq}\). Por definición,\(x_{eq}\) satisface
\[x_{eq} =F(x_{eq}).\label{(5.57)} \]
Para analizar la estabilidad del sistema alrededor de este punto de equilibrio, cambiamos nuestra perspectiva de un sistema de coordenadas global a uno local, al acercar y capturar una pequeña perturbación añadida al punto de equilibrio,\(∆x_{t} = x_{t} −x_{eq}\). Específicamente, aplicamos el siguiente reemplazo
\[∆x_{t} \Rightarrow x_{eq} −x_{t}\label{(5.58)} \]
a la Ecuación\ ref {(5.56)}, para obtener
\[x_{eq} +\Delta x_{t} =F(x_{eq} +\Delta x_{t-1}). \label{(5.59)} \]
El lado derecho de la ecuación anterior sigue siendo una función no lineal. Si\(x_{t}\) es escalar y por lo tanto\(F(x)\) es una función escalar, el lado derecho se puede aproximar fácilmente usando la expansión Taylor de la siguiente manera:
\[F(x_{eq} +\Delta {x_{t-1}}) =F(x_{eq})+F'(x_{eq})\Delta {x_{t-1}}+\frac{F''(x_{eq})}{2!}Delta {x_{t-1}^{2}}+\frac{F'''(x_{eq})}{3!}Delta {x_{t-1}^{3}}+ \vdots + \label{(5.60)} \]\[\approx F(x_{eq})+F'(x_{eq})\Delta {x_{t-1}} \label{(5.61)} \]
Esto significa que, para una función escalar\(F\),\(F_(x_{eq} +∆x)\) puede aproximarse linealmente por el valor de la función en\(x_{eq}\) más una derivada de la función multiplicada por el desplazamiento de\(x_{eq}\). Junto con este resultado y la Ecuación\ ref {(5.57)}, la Ecuación\ ref {(5.59)} se convierte en la siguiente ecuación de diferencia lineal muy simple:
\[\Delta {x_{t}} \approx F'{x_{eq}}\Delta {x_{t-1}}\label{(5.62)} \]
Esto significa que, si\(|F_{0}(x_{eq)}| > 1\),\(∆_{x}\) crece exponencialmente, y así el punto de equilibrio\(x_{eq}\) es inestable. O si |\(F_{0}(x_{eq})| < 1\),\(∆_{x}\) se encoge exponencialmente, y así\(x_{eq}\) es estable. Curiosamente, esta conclusión tiene alguna conexión con la trama telaraña que discutimos antes. \(|F_{0}(x_{eq})|\)es la pendiente de la función\(F\) en un punto de equilibrio (donde la curva de función cruza la línea recta diagonal en la gráfica de telaraña). Si la pendiente es demasiado pronunciada, ya sea positiva o negativamente, las trayectorias divergirán alejándose del punto de equilibrio. Si la pendiente es menos empinada que 1, las trayectorias convergerán al punto. Es posible que hayas notado tales características cuando dibujaste las parcelas de telaraña. El análisis de estabilidad lineal ofrece una explicación matemática de ello.
Ahora bien, ¿y si\(F\) es una función no lineal multidimensional? Tal se\(F\) puede deletrear como un conjunto de múltiples funciones escalares, de la siguiente manera:
\[x_{1,t} =F_{1}(x_{1},x_{2,t-1},...,x_{n,t-1})\label{(5.63)} \]
\[x_{2,t} =F_{2}(x_{1},x_{2,t-1},...,x_{n,t-1})\label{(5.64)} \]
\[\vdots \nonumber \]
\[x_{n,t} =F_{n}(x_{1},x_{2,t-1},...,x_{n,t-1})\label{(5.65)} \]
Usando el reemplazo de variables similar a la ecuación\ ref {(5.58)}, estas ecuaciones se reescriben de la siguiente manera:
\[x_{1,eq} +\Delta{x_{1,t}} =F_{1}(x_{1,eq}+\Delta{x_{1,t-1}},x_{2,eq}+\Delta{x_{2,t-1}}...,x_{n,eq}+\Delta{x_{n,t-1}}\label{(5.66)} \]
\[x_{2,eq} +\Delta{x_{2,t}} =F_{2}(x_{1,eq}+\Delta{x_{1,t-1}},x_{2,eq}+\Delta{x_{2,t-1}}...,x_{n,eq}+\Delta{x_{n,t-1}}\label{(5.67)} \]
\[\vdots \nonumber \]
\[x_{n,eq} +\Delta {x_{2,t}} =F_{2}(x_{1,eq}+\Delta {x_{1,t-1}},x_{2,eq}+\Delta {x_{2,t-1}}...,x_{n,eq}+\Delta {x_{n,t-1}}\label{(5.68)} \]
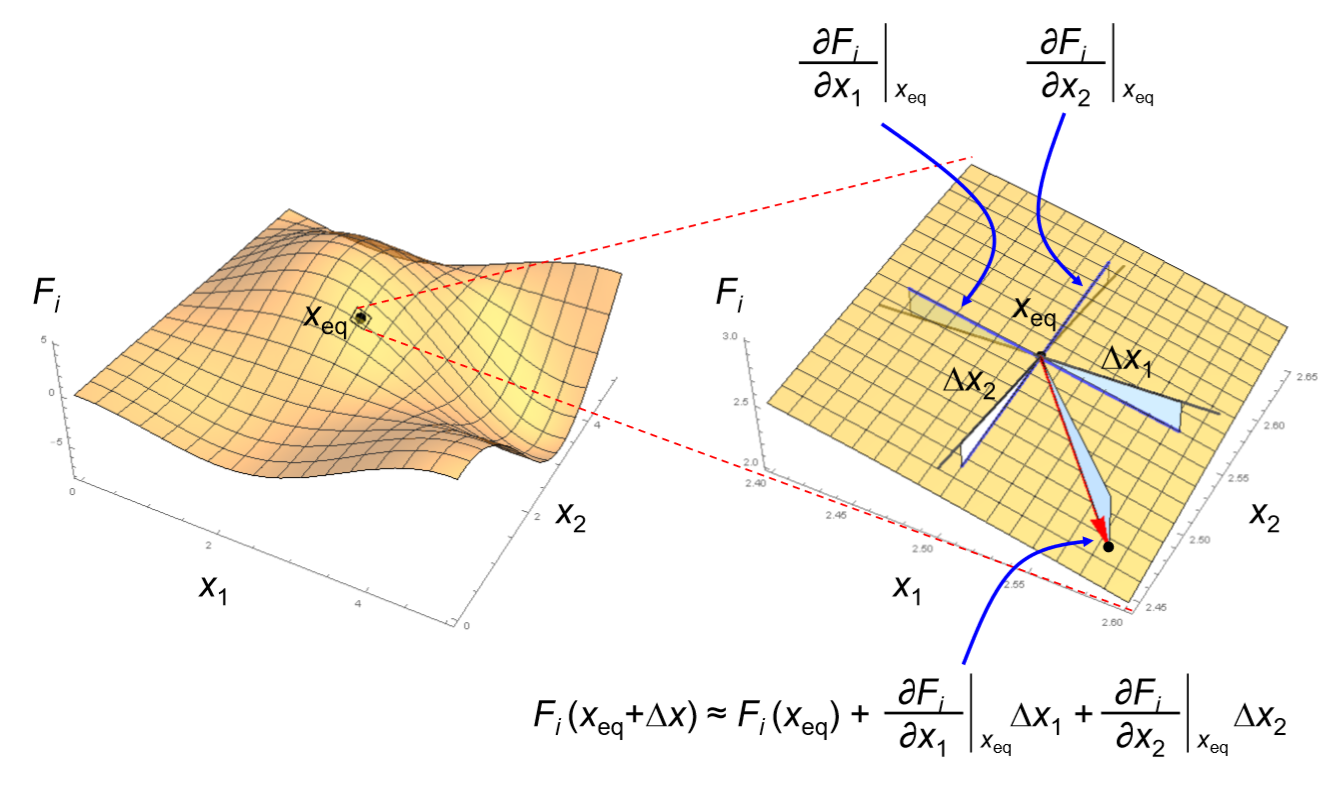
Dado que hay muchos\(∆x_i\)'s en esta fórmula, la expansión Taylor podría no aplicarse simplemente. Sin embargo, la suposición de que son extremadamente pequeños ayuda a simplificar el análisis aquí. Al hacer zoom en un área infinitesimalmente pequeña cerca del punto de equilibrio, cada uno\(F_{i}\) parece un “plano” completamente flat en un espacio multidimensional (Fig. 5.7.1) donde todas las interacciones no lineales entre\(∆x_{i}\)'s son insignificantes. Esto significa que el valor de\(F_{i}\) puede aproximarse mediante una simple suma lineal de contribuciones independientes provenientes de las n dimensiones, cada una de las cuales puede calcularse de manera similar a la Ec. \(\ref{(5.61)}\), como
\[F_{i}(x_{1,eq}+\Delta {x_{1,t-1}},x_{2,eq}+\Delta {x_{2,t-1}}...,x_{n,eq}+\Delta{ x_{n,t-1}} \nonumber \]
\[\approx F_{i}(x_{eq} +\frac{\partial{F_{i}}}{\partial{x_{1}}}|_{eq} \Delta {x_{1,t-1}}+\frac{\partial{F_{i}}}{\partial{x_{2}}}|_{eq} \Delta {x_{2,t-1}}+...+\frac{\partial{F_{i}}}{\partial{x_{2}}}|_{eq}\Delta {x_{n,t-1}}.\label{(5.69)} \]
Esta aproximación lineal nos permite reescribir Eqs. \ ref {(5.66)},\ ref {(5.67)}\ ref {(5.68)} en la siguiente ecuación lineal muy concisa:
\[x_{eq} +\Delta{x_{t}} \approx F(x_{eq}) +\begin{pmatrix}\frac{\partial {F_1} }{\partial{x_1}} & \frac{\partial{F_1}}{\partial{x_1}} &.&.&.&\frac{\partial{F_1}}{\partial{x_n}}\\ \frac{\partial{F_2}}{\partial{x_1}} &\frac{\partial{F_2}}{\partial{x_2}} &.&.&. &\frac{\partial{F_2}}{\partial{x_n}}\\ & . & . &. \\& . & . &.\\ \frac{\partial{F_n} }{\partial{x_1}} &\frac{\partial{F_n}}{\partial{x_2}} &.&.&.&\frac{\partial{F_n}}{\partial{x_n}}\end{pmatrix} |_{x=x_{eq}} \Delta{x_{t-1}}\label{(5.70)} \]
La matriz de coeficientes rellena con derivadas parciales se denomina matriz jacobiana de la función multidimensional original F. Es una aproximación lineal de la función no lineal
alrededor\(x = x_{eq}\), al igual que una derivada regular de una función escalar. Tenga en cuenta que los órdenes de filas y columnas de una matriz jacobiana deben coincidir. Su\(i\) -ésima fila debe ser una lista de derivadas espaciales de\(F_{i}\), es decir, una función que determine el comportamiento de\(x_{i}\), mientras que\(x_{i}\) debe usarse para diferenciar funciones para la\(i\) -ésima columna.
Al combinar el resultado anterior con la ecuación\ ref {(5.57)}, obtenemos
\[\Delta{x_{t}} \approx J \Delta{x_{t-1}},\label{(5.71)} \]
donde\(J\) está la matriz jacobiana de\(F\) at\(x = x_{eq}\). ¡Mira lo simple que puede llegar a ser! Las dinámicas se aproximan en una forma lineal muy simple, que describe el comportamiento de las pequeñas perturbaciones alrededor\(x_{eq}\) como el nuevo origen.
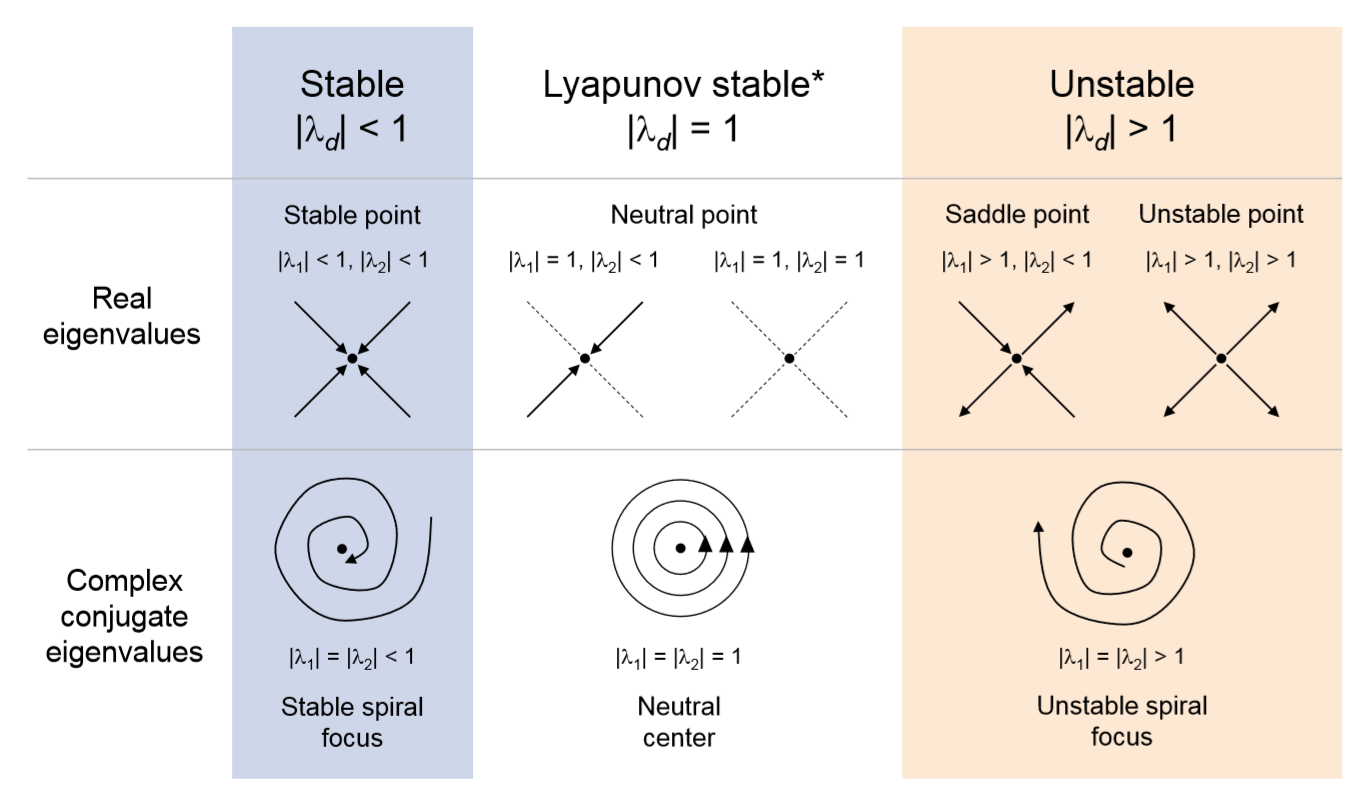
Ahora podemos calcular los valores propios de J para ver si este sistema es estable o no, alrededor\(x_{eq}\). Si el valor absoluto del valor propio dominante\(λ_{d}\) es menor que 1, el punto de equilibrio es estable; aunque se añada una pequeña perturbación al estado del sistema, éste vuelve asintóticamente al punto de equilibrio. Si\(|λd| > 1\), el punto de equilibrio es inestable; cualquier pequeña perturbación añadida al estado del sistema crece exponencialmente y, eventualmente, el estado del sistema se aleja del punto de equilibrio. En ocasiones, un punto de equilibrio inestable puede venir con otros valores propios que muestran estabilidad. Dichos puntos de equilibrio se denominan puntos de silla de montar, donde las trayectorias cercanas son atraídas hacia el punto de equilibrio en algunas direcciones pero son repelidas en otras direcciones. Si\(|λd| = 1\), indica que el sistema puede ser neutro (también llamado estable de Lyapunov), lo que significa que el estado del sistema no diverge ni se aleja ni converge al punto de equilibrio. Pero en realidad, demostrar que el punto es verdaderamente neutral requiere un análisis no lineal más avanzado, que está más allá del alcance de este libro de texto. Finalmente, si los valores propios son conjugados complejos, la dinámica oscilatoria está sucediendo alrededor de los puntos de equilibrio. Dichos puntos de equilibrio se denominan foco espiral estable o inestable o centro neutro, dependiendo de sus estabilidades. La Figura 5.7.2 muestra un resumen esquemático de estas clasificaciones de puntos de equilibrio para casos bidimensionales.
1. Encuentra un punto de equilibrio del sistema que te interesa.
2. Calcular la matriz jacobiana del sistema en el punto de equilibrio.
3. Calcular los valores propios de la matriz jacobiana.
4. Si el valor absoluto del valor propio dominante es:
• Mayor que 140×El punto de equilibrio es inestable.
— Si otros valores propios tienen valores absolutos menores a 1, el punto de equilibrio es un punto de sillín.
• Menos de 140×El punto de equilibrio es estable.
• Igual a 1© El punto de equilibrio puede ser neutro (Lyapunov estable).
5. Además, si hay complejos valores propios conjugados involucrados, las dinámicas oscilatorias están sucediendo alrededor del punto de equilibrio. Si esos valores propios conjugados complejos son los dominantes, el punto de equilibrio se denomina foco espiral estable o inestable (o centro neutro si el punto es neutro).
Considere el siguiente mapa iterativo\((a > 0, b > 0)\)
\[x_{t} =x_{t-1}+asin(bx_{t-1})\label{(5.72)} \]
Realizar análisis de estabilidad lineal para determinar si este modelo es estable o no en su punto de equilibrio\(x_{eq} = 0\).
Considere el siguiente modelo de ecuación de diferencia bidimensional:
\[x_{t}=x_{t-1} +2x_{t-1}(1-x_{t-1})-x_{t-1}y_{t-1}\label{(5.73)} \]
\[y_{t} =y_{t-1} +2y_{t-1}(1-y_{t-1})-x_{t-1}y_{t-1}\label{(5.74)} \]
1. Encuentra todos sus puntos de equilibrio.
2. Calcular la matriz jacobiana en el punto de equilibrio donde\(x > 0\) y\(y > 0\).
3. Calcular los valores propios de la matriz obtenida anteriormente.
4. Con base en el resultado, clasifique el punto de equilibrio en uno de los siguientes: punto estable, punto inestable, punto de sillín, foco espiral estable, foco espiral inestable o centro neutro.
Considere el siguiente modelo de ecuación de diferencia bidimensional:
\[x_{t} =x_{t-1}y_{t-1}\label{(5.75)} \]
\[y_{t}=y_{t-1}(x_{t-1}-1)\label{(5.76)} \]
1. Encuentra todos los puntos de equilibrio (que quizás ya hayas hecho en el Ejercicio 5.7.2).
2. Calcular la matriz jacobiana en cada uno de los puntos de equilibrio.
3. Calcular los valores propios de cada una de las matrices obtenidas anteriormente.
4. Con base en los resultados, discutir la estabilidad de cada punto de equilibrio.