
7.5: Análisis de Estabilidad Lineal de Sistemas Dinámicos No Lineales
- Page ID
- 115651
Finalmente, podemos aplicar análisis de estabilidad lineal a sistemas dinámicos no lineales de tiempo continuo. Considerar la dinámica de una ecuación diferencial no lineal
\[\frac{dx}{dt} =F(x) \label{(7.64)} \]
alrededor de su punto de equilibrio\(x_{eq}\). Por definición,\(x_{eq}\) satisface
\[0=F(x_{eq}). \label{(7.65)} \]
Para analizar la estabilidad del sistema alrededor de este punto de equilibrio, hacemos el mismo cambio de coordenadas que hicimos para los modelos de tiempo discreto. Específicamente, aplicamos el siguiente reemplazo
\[x(t) \Rightarrow x_{eq}+\Delta{x(t)} \label{(7.66)} \]
a la Ecuación\ ref {(7.64)}, para obtener
\[\frac{d(x_{eq}+\Delta{x})}{dt} =\frac{d\Delta{x}}{dt} =F(x_{eq}+\Delta{x}) \label{(7.67)} \]
Ahora que sabemos que la función no lineal\(F\) en el lado derecho se puede aproximar usando el\(Jacobian \ matrix\), la ecuación anterior se aproxima como
\[\frac{d\Delta{x}}{dt} \approx F(x_{eq})+J\Delta{x}, \label{(7.68)} \]
donde\(J\) esta la matriz jacobiana de\(F\) at\(x = x_{eq}\) (si olvidaste cuál era la matriz jacobiana, ver Eq. (5.7.18)). Al combinar el resultado anterior con la Ecuación\ ref {(7.65)}, obtenemos
\[\frac{d\Delta{x}}{dt} \approx J\Delta{x} \label{(7.69)} \]
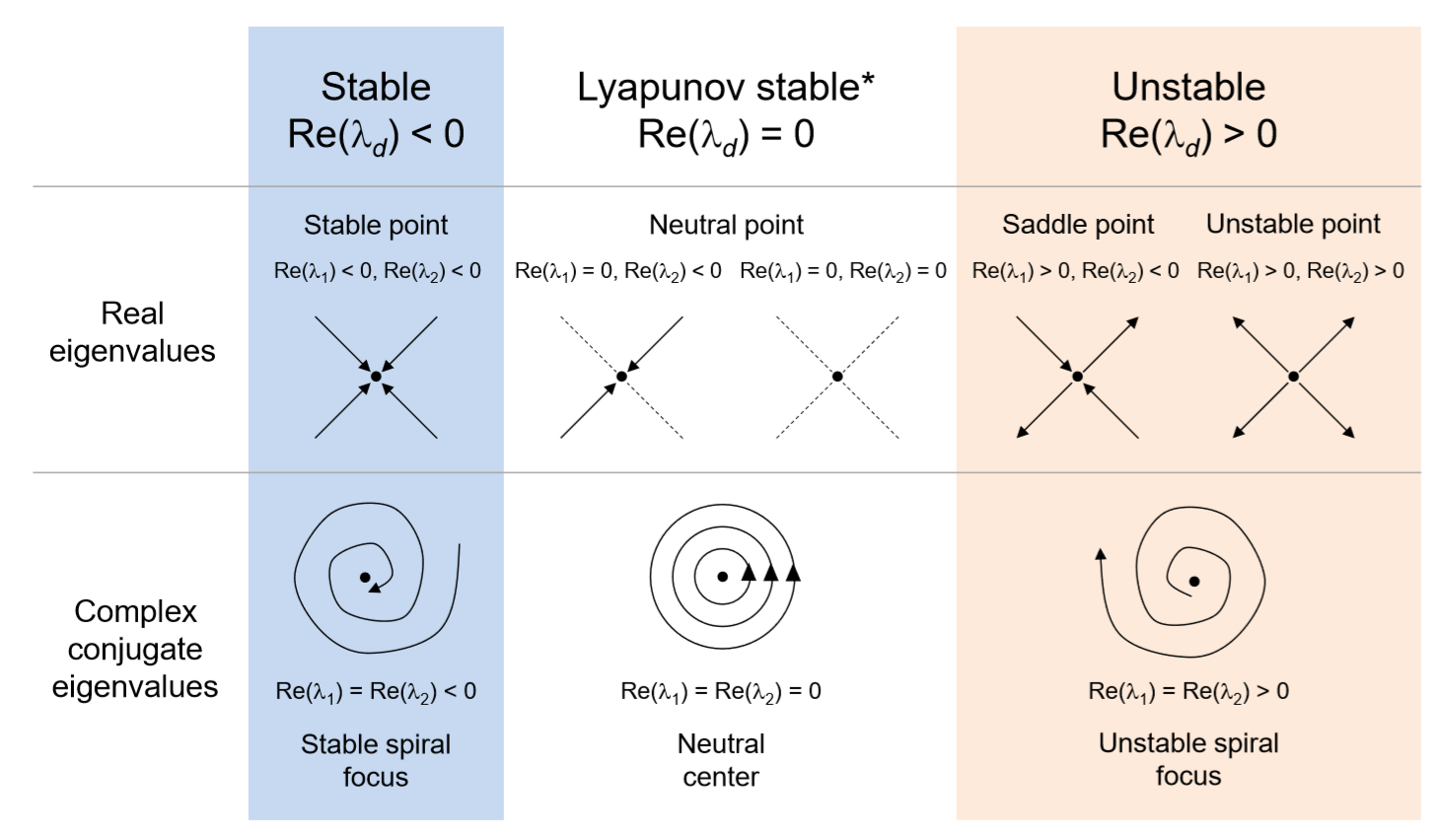
Tenga en cuenta que el resultado final es muy similar al de los modelos de tiempo discreto. El resto del proceso es algo con lo que ya estamos familiarizados: Calcular los valores propios\(J\) e interpretar los resultados para determinar la estabilidad del punto de equilibrio\(x_{eq}\). Las únicas diferencias con respecto a los modelos de tiempo discreto son que hay que mirar las partes reales de los valores propios, y luego compararlos con 0, no con 1. La Figura 7.6 muestra un resumen esquemático de clasificaciones de puntos de equilibrio para sistemas dinámicos bidimensionales de tiempo continuo.
1. Encuentra un punto de equilibrio del sistema que te interesa.
2. Calcular la matriz jacobiana del sistema en el punto de equilibrio.
3. Calcular los valores propios de la matriz jacobiana.
4. Si la parte real del valor propio dominante es:
• Mayor que\(0⇒\) El punto de equilibrio es inestable.
— Si otros valores propios tienen partes reales menores que 0, el punto de equilibrio es un punto de sillín.
• Menos que\( 0⇒\) El punto de equilibrio es estable.
• Igual a\( 0⇒\) El punto de equilibrio puede ser neutro (Lyapunov estable).
5. Además, si hay complejos valores propios conjugados involucrados, las dinámicas oscilatorias están sucediendo alrededor del punto de equilibrio. Si esos valores propios conjugados complejos son los dominantes, el punto de equilibrio se denomina foco espiral estable o inestable (o centro neutro si el punto es neutro).
Considere el modelo de crecimiento logístico\((r > 0, K > 0)\):
\[\frac{dx}{dt} =rx(1-\frac{x}{K}) \label{7.70} \]
Realizar un análisis de estabilidad lineal para determinar si este modelo es estable o no en cada uno de sus puntos de equilibrio\(x_{eq} = 0,K\).
Considere las siguientes ecuaciones diferenciales que describen la interacción entre dos especies llamadas\(commensalism\) (especies se\(x\) benefician de la presencia de especies y pero no influencia\(y\)):
\[\frac{dx}{dt} =-x +rxy-x^{2}\label{(7.71)} \]
\[\frac{dy}{dt} =y(1-y)\label{(7.72)} \]
\[x \geq 0, y\geq 0, r>1\label{(7.73)} \]
1. Encuentra todos los puntos de equilibrio.
2. Calcular la matriz jacobiana en el punto de equilibrio donde\(x > 0\) y\(y > 0\).
3. Calcular los valores propios de la matriz obtenida anteriormente.
4. Con base en el resultado, clasifique el punto de equilibrio en uno de los siguientes: Punto estable, punto inestable, punto de sillín, foco espiral estable, foco espiral inestable o centro neutro.
Considere las ecuaciones diferenciales de la\(SIR model\):
\ [\ frac {dS} {di} = -ASi\\ etiqueta {(7.74)}]
\[\frac{dI}{dt} =aSI -bI\label{(7.75)} \]
\[\frac{dR}{dt} =bI\label{(7.76)} \]
Como se ve en las ecuaciones anteriores,\(R\) no influencia los comportamientos de\(S\) y\(I\), así se puede ignorar con seguridad la tercera ecuación para hacer que el modelo sea bidimensional. Haga lo siguiente:
1. Encuentra todos los puntos de equilibrio (que quizás ya hayas hecho en el Ejercicio 7.1.3).
2. Calcular la matriz jacobiana en cada uno de los puntos de equilibrio.
3. Calcular los valores propios de cada una de las matrices obtenidas anteriormente. 4. Con base en los resultados, discutir la estabilidad de cada punto de equilibrio.