
7.4: Comportamiento asintótico de sistemas dinámicos lineales de tiempo continuo
- Page ID
- 115642
Una fórmula general para sistemas dinámicos lineales de tiempo continuo viene dada por
\[\frac{dx}{dt} =Ax, \label{(7.40)} \]
donde\(x\) es el vector de estado del sistema y\(A\) es la matriz de coeficientes. Como se discutió anteriormente, podría agregar un vector constante a al lado derecho, pero siempre se puede convertir en una forma libre de constantes aumentando las dimensiones del sistema, de la siguiente manera:
\[y =\begin{pmatrix} x\\1\end{pmatrix}\label{(7.41)} \]
\[\frac{dy}{dt} =\begin{pmatrix} A&a\\0&0\end{pmatrix} \begin{pmatrix} x\\1\end{pmatrix} =By \label{(7.42)} \]
Tenga en cuenta que el elemento de última fila y última columna de la matriz de coeficientes expandidos es ahora 0, no 1, debido a la Ec. 6.3.9. Este resultado garantiza que la forma libre de constantes dada en la Ecuación\ ref {(7.40)} es lo suficientemente general como para representar diversas dinámicas de sistemas dinámicos lineales. Ahora bien, ¿cuál es el comportamiento asintótico de la Ecuación\ ref {(7.40)}? Esto puede no parecer tan intuitivo, pero resulta que también hay una solución de forma cerrada disponible para este caso. Aquí está la solución, que generalmente es aplicable para cualquier matriz cuadrada\(A\):
\[x(t) =c^{At}x(0)\label{(7.43)} \]
Aquí,\(e^{X}\) es una matriz exponencial para una matriz cuadrada\(X\), que se define como
\[e^{X} =\sum ^{\infty}_{k=0}\frac{X^{k}}{k!},\label{(7.44)} \]
i-ésima\(X^(0)= I\). Esta es una definición basada en la serie Taylor de un exponencial habitual, pero ahora se generaliza aceptar una matriz cuadrada en lugar de un número escalar (que es una matriz cuadrada de 1 x 1, por cierto). Se sabe que esta serie infinita siempre converge en una matriz cuadrada bien definida para cualquier\(X\). Tenga en cuenta que\(e^(X)\) es del mismo tamaño que\(X\).
Confirme que la solución Ecuación\ ref {7.43} satisface la Ecuación\ ref {(7.40)}.
La matriz exponencial\(e^{X}\) tiene algunas propiedades interesantes. En primer lugar, sus valores propios son los exponenciales de los\(X\) 'seigenvalues. En segundo lugar, sus vectores propios son los\(X\) mismos como vectores propios. Es decir:
\[Xv=\lambda{v}\ \Rightarrow \ x^{X}v =e^{\lambda}v\label{(7.45)} \]
Confirme la Ecuación\ ref {(7.45)} usando la Ecuación\ ref {(7.44)}.
Podemos utilizar estas propiedades para estudiar el comportamiento asintótico de la Ecuación\ ref {(7.43)}. Al igual que en el Capítulo 5, asumimos que\(A\) es diagonalizable y por lo tanto tiene tantos vectores propios linealmente independientes como las dimensiones del espacio de estado. Entonces el estado inicial del sistema se puede representar como
\[x(0) =b_{1}v_{1}+b_{2}v_{2}+...b_{n}v_{n},\label{(7.46)} \]
donde\(n\) está la dimensión del espacio de estado y\(vi\) son los vectores propios de\(A\) (y de\(e^{A}\)). Aplicando esto a la Ecuación\ ref {(7.43)} da como resultado
\[x(t) =e^{At}(b_{1}v_{1}+b_{2}v_{2}+...b_{n}v_{n})\label{(7.47)} \]
\[=(b_{1}e^{At}v_{1}+b_{2}e^{At}v_{2}+...b_{n}e^{At}v_{n})\label({7.48)} \]
\[=(b_{1}e^{\lambda_{1} {t}}v_{1}+b_{2}e^{(\lambda_{2} {t}}v_{2}+...b_{n}e^{\lambda_{n}{t}}v_{n}).\label{(7.49)} \]
Este resultado muestra que el comportamiento asintótico de\(x(t)\) viene dado por una suma de múltiples términos exponenciales de\(e^{λ_{i}}\) (tenga en cuenta la diferencia, esto fue\(λ_{i}\) para modelos de tiempo discreto). Por lo tanto, qué término finalmente domina a los demás está determinado por el valor absoluto de\(e^{λ_{i}}\). Porque\(|e^{λ_{i}} | = e^{Re(λ_{i})}\), esto significa que el valor propio que tiene la mayor parte real es el valor propio dominante para los modelos de tiempo continuo. Por ejemplo, si\(λ_{1}\) tiene la mayor parte real\((Re(λ_{1}) > Re(λ_{2}),Re(λ_{3}),...Re(λ_{n}))\), entonces
\[x(t) =e^{\lambda_{1} {t}}(b_{1}v_{1}+b_{2}e^{(\lambda_{2} -\lambda_{1})t}v_{2}+...b_{n}e^({\lambda_{n} -\lambda_{1})t}v_{n}),\label{(7.50)} \]
\[\lim_{ t\rightarrow \infty}{x(t)}\approx e^{\lambda_{1} {t}}b_{1}v_{1}.\label{(7.51)} \]
Similar a los modelos discreto-tiempo, los valores propios y vectores propios dominantes nos dicen el comportamiento asintótico de los modelos de tiempo continuo, pero con un criterio de estabilidad un poco diferente. Es decir, si la parte real del valor propio dominante es mayor que\(0\), entonces el sistema diverge al infinito, es decir, el sistema es inestable. Si es menor que\(0\), el sistema eventualmente se contrae a cero, es decir, el sistema es estable. Si es precisamente\(0\), entonces el componente de vector propio dominante del estado del sistema se conserva sin divergencia ni convergencia, y así el sistema puede converger a un punto de equilibrio distinto de cero. La misma interpretación también se puede aplicar a los valores propios no dominantes.
Un valor propio nos dice si un componente particular del estado de un sistema (dado por su correspondiente vector propio) crece o se contrae con el tiempo. Para modelos de tiempo continuo:
• Re (\(λ\)) > 0 significa que el componente está creciendo.
• Re (\(λ\)) < 0 significa que el componente se está encogiendo.
• Re (\(λ\)) = 0 significa que el componente está conservado.
Para los modelos de tiempo continuo, la parte real del valor propio dominante λd determina la estabilidad de todo el sistema de la siguiente manera:
• Re\((λ_{d}) > 0\): El sistema es\(unstable\), divergiendo al infinito.
• Re\((λ_{d}) < 0\): El sistema es\(stable\), convergiendo al origen.
• Re\((λ_{d}) = 0\): El sistema es\(stable\), pero se conserva el componente de vector propio dominante, y por lo tanto el sistema puede converger a un punto de equilibrio distinto de cero.
He aquí un ejemplo de un sistema dinámico lineal bidimensional general en tiempo continuo (también conocido como el modelo de “amoríos” propuesto por Strogatz [29]):
\[\frac{dx}{dt} =\begin {pmatrix} a & b \\c & d\end{pmatrix}x=Ax\label{(7.52)} \]
Los valores propios de la matriz de coeficientes se pueden obtener resolviendo la siguiente ecuación para\(λ\):
\[\det\begin{pmatrix} a-\lambda &b \\c & d-\lambda\end{pmatrix} =0\label{(7.53)} \]
O bien:
\[ (a-\lambda)(d-\lambda)-bc =\lambda^{2} -(a+d)\lambda +ad-bc \label{(7.54)} \]
\[=\lambda^{2} -Tr(A)\lambda +det(A)=0\label{(7.55)} \]
Aquí,\(Tr(A)\) está la traza de matriz\(A\), es decir, la suma de sus componentes diagonales. Las soluciones de la ecuación anterior son
\[\lambda = \frac{Tr(A)\pm \sqrt{Tr(A)^{2}-4det(A)}}{2}.\label{(7.56)} \]
Entre esos dos valores propios, ¿cuál es dominante? Dado que el radical en el numerador da ya sea un valor real no negativo o un valor imaginario, el que tiene un signo “más” siempre tiene la mayor parte real. Ahora podemos encontrar las condiciones para las que este sistema es estable. La parte real de este valor propio dominante se da de la siguiente manera:
\[Re(\lambda_{d}) = \begin{cases} & \frac{Tr(A)}{2} \text{ if } Tr(A)^{2} <4det(A) \\& \frac{Tr(A) + \sqrt{Tr(A)^{2}-4det(A)}}{2} \text { if } Tr(A)^{2} \geq 4det(A)\end{cases} \label{(7.57)} \]
Si\(Tr(A)^{2} < 4 \ det(A)\), la condición de estabilidad es simplemente
\[Tr(A) <0.\label{(7.58)} \]
Si\(Tr(A)^{2} ≥ 4 \ det(A)\), la condición de estabilidad se deriva de la siguiente manera:
\[Tr(A) +\sqrt{Tr(A)^{2} -4 \ det(A) }<0\label{(7.59)} \]
\[\sqrt{Tr(A)^{2}-4 \ det(A)} <-Tr(A)\label{(7.60)} \]
Ya que el radical del lado izquierdo debe ser no negativo,\(Tr(A)\) debe ser negativo, al menos. Además, al cuadrar ambos lados, obtenemos
\[Tr(A)^{2}-4det(A)<Tr(A)^{2}\label{(7.61)} \]
\[-4det(A)<0,\label{(7.62)} \]
\[det(A) >0.\label{(7.63)} \]
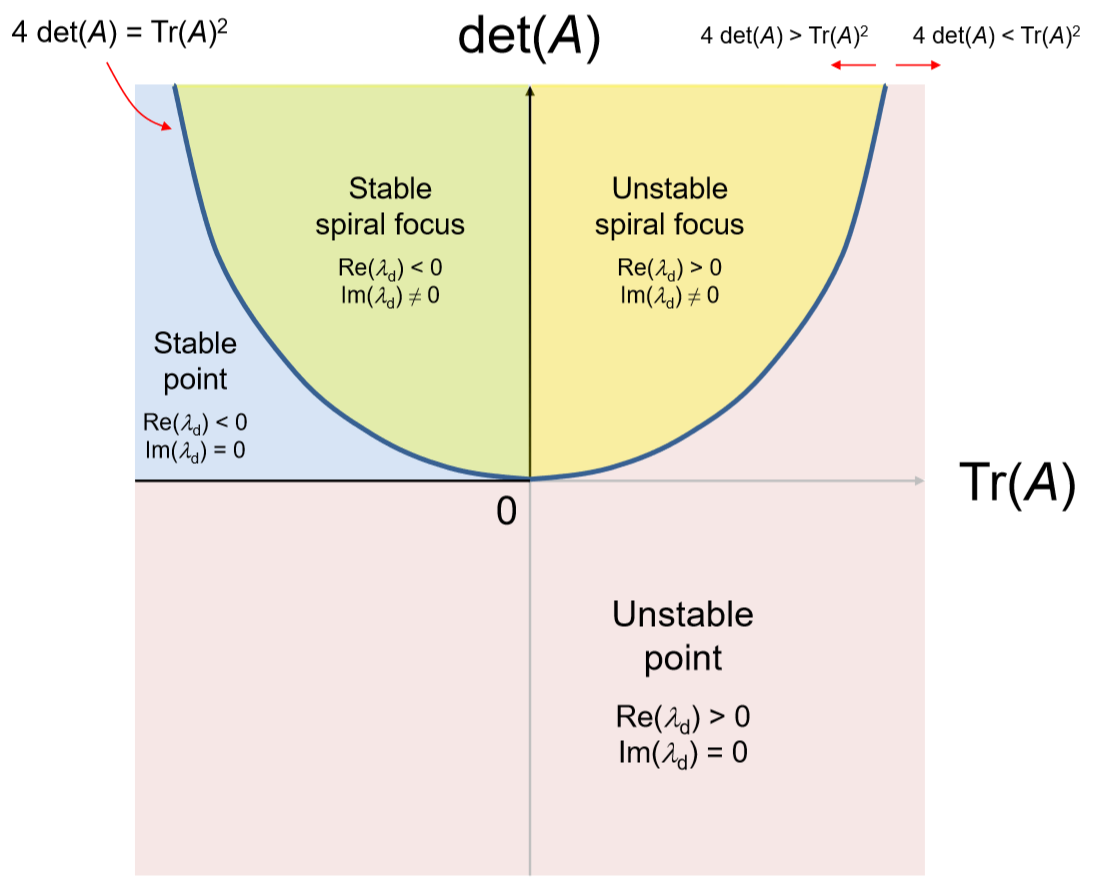
Al combinar todos los resultados anteriores, podemos resumir cómo depende la estabilidad del sistema dinámico lineal bidimensional\(Tr(A)\) y\(det(A)\) en un diagrama simple como se muestra en la Fig. 7.5. Tenga en cuenta que este diagrama es aplicable únicamente a sistemas bidimensionales, y no es generalizable para sistemas que involucren tres o más variables.
Mostrar que los puntos inestables con\(det(A) < 0\) son puntos de sillín.
Determinar la estabilidad de los siguientes sistemas lineales:
\[ \cdot \frac{dx}{dt}= \begin{pmatrix} -1 & 2\\2 &-2 \end{pmatrix} x \nonumber \]
\[\cdot \frac{dx}{dt} =\begin{pmatrix} 0.5 & -1.5\\ 1&-1\end{pmatrix} x \nonumber \]
Confirmar el resultado analítico mostrado en la Fig. 7.4.1 realizando simulaciones numéricas en Python y dibujando espacios de fase del sistema para varias muestras de\(A\).