
8.3: Bifurcaciones Hopf en modelos 2-D de tiempo continuo
- Page ID
- 115764
Para sistemas dinámicos con dos o más variables, los valores propios dominantes de la matriz jacobiana en un punto de equilibrio podrían ser conjugados complejos. Si tal punto de equilibrio, mostrando un comportamiento oscilatorio a su alrededor, cambia su estabilidad, la bifurcación resultante se llama bifurcación Hopf. Una bifurcación Hopf generalmente causa la aparición (o desaparición) de un ciclo límite alrededor del punto de equilibrio. Un ciclo límite es una trayectoria cíclica cerrada en el espacio de fase que se define como un límite asintótico de otras trayectorias oscilatorias cercanas. Se puede comprobar si la bifurcación es Hopf o no mirando los componentes imaginarios de los valores propios dominantes cuyas partes reales están en un valor crítico (cero); si hay componentes imaginarios distintos de cero, debe ser una bifurcación Hopf.
Aquí hay un ejemplo, un modelo dinámico de un oscilador no lineal, llamado oscilador van der Pol:
\[\dfrac{d^{2}x}{xt^{2}} +r(x^{2}-1)\dfrac{dx}{dt} +x=0 \label{(8.20)} \]
Esta es una ecuación diferencial de segundo orden, por lo que debemos introducir una variable adicional\(y = dx/dt\) para convertirla en un sistema 2-D de primer orden, de la siguiente manera:
\[\begin{align} \dfrac{dx}{dt} =y \label{(8.21)} \\[4pt] \dfrac{dy}{dt} &=r(x^{2}-1)y-x \label{(8.22)} \end{align} \]
A partir de estos, podemos demostrar fácilmente que el origen,\((x,y) = (0,0)\), es el único punto de equilibrio de este sistema. La matriz jacobiana de este sistema en el origen se da de la siguiente manera:
\[\begin {pmatrix} 0 & 1 \\ 2rxy-1 & -r(x^{2}-1) \end {pmatrix}\ |_{(x,y)=(0,0) =}\begin{pmatrix}0 & 1 \\-1 & r\end{pmatrix} \label{(8.23)} \]
Los valores propios de esta matriz se pueden calcular de la siguiente manera:
\[\begin {vmatrix} 0-\lambda & 1 \\-1 & r-\lambda\end {vmatrix} =0 \label{(8.24)} \]
\[-\lambda(r-\lambda) +1 =\lambda^{2} -r\lambda +1 =0\label{(8.25)} \]
\[\lambda =\dfrac{r \pm \sqrt{r^{2}-4}}{2} \label{(8.26)} \]
La condición crítica para que ocurra una bifurcación es
\[Re(\lambda) =0,\label{(8.27)} \]
cuyo lado izquierdo se puede detallar con más detalle como
\[Re(\lambda) =\begin{cases}\dfrac{r \pm \sqrt{r^{2}-4}}{2} & \text{if}\ r^{2}\geq 4, \text{or} \\ \dfrac{r}{2} & \text{if}\ r^{2} <4.\end{cases}\label{(8.28)} \]
El primer caso no puede ser cero, por lo que la única condición crítica para que se produzca una bifurcación es el segundo caso, i.e.
\(r=0\), cuándo\(Re(\lambda) =0\) y\(Im(\lambda) =\pm i\). \(\label{(8.29)}\)
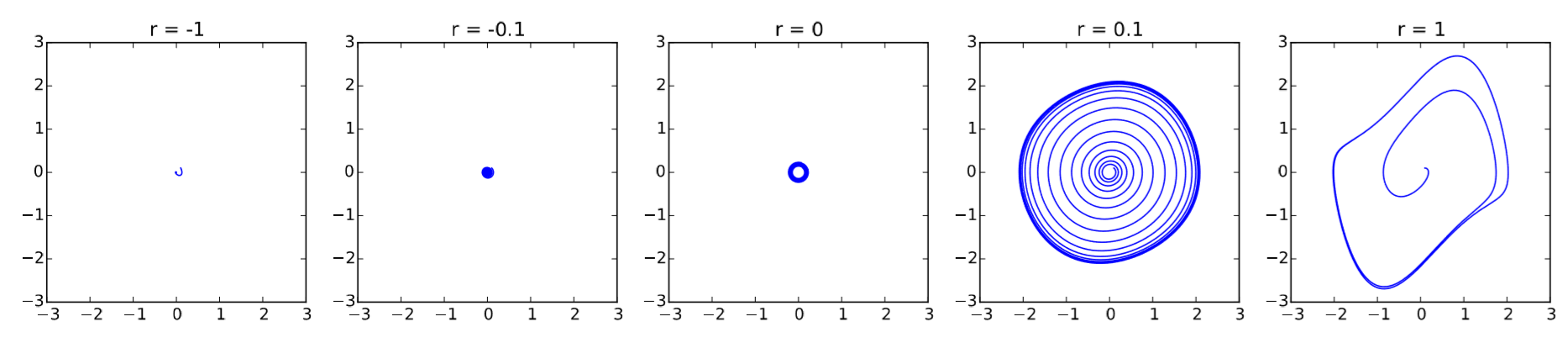
Esta es una bifurcación Hopf porque los valores propios tienen partes imaginarias distintas de cero cuando se produce el cambio de estabilidad. Podemos confirmar esta predicción analítica mediante simulaciones numéricas del modelo con sistemáticamente variadas\(r\), de la siguiente manera:

El modelo Fitzhugh-nagumo [30, 31] es un modelo simplificado de dinámica neuronal que puede demostrar tanto como\(excited\)\(resting\) comportamientos de las neuronas. En una configuración normal, el estado de este sistema converge y permanece en un punto de equilibrio estable (reposo), pero cuando se perturbe, el estado del sistema se mueve a través de una gran trayectoria cíclica en el espacio de fase antes de volver al estado de reposo, que se observa como un gran pulso cuando se traza a lo largo del tiempo (excitación). Además, bajo ciertas condiciones, este sistema puede mostrar un comportamiento oscilatorio no lineal que produce continuamente una secuencia de pulsos. El desplazamiento conductual entre la convergencia al estado de reposo y la generación de una secuencia de pulsos ocurre como una bifurcación Hopf, donde se usa la corriente externa como parámetro de control. Aquí están las ecuaciones del modelo:
\[\dfrac{dx}{dt} =c(x-\dfrac{x^{3}}{3}+y+z) \label{(8.30)} \]
\[\dfrac{dy}{dt} =-\dfrac{x -a +by}{c} \label{(8.31)} \]
\(z\)es el parámetro clave que representa la corriente externa aplicada a la neurona. Otros parámetros suelen estar restringidos de la siguiente manera:
\[1-\dfrac{2}{3}b <a< 1 \label{(8.32)} \]
\[0<b<1 \label{(8.33)} \]
\[b<c^{2}\label (8.34) \]
Con\(a = 0.7\),\(b = 0.8\), y\(c = 3\), hacer lo siguiente:
- Obtener numéricamente el punto de equilibrio de este modelo para varios valores de\(z\), que oscilan entre -2 y 0. Solo hay un punto de equilibrio real en este sistema.
- Aplicar el resultado obtenido anteriormente a la matriz jacobiana del modelo, y evaluar numéricamente la estabilidad de ese punto de equilibrio para cada valor de\(z\).
- Estimar los umbrales críticos\(z\) a los que se produce una bifurcación Hopf. Hay dos umbrales críticos de este tipo.
- Dibuja una serie de sus espacios de fase con valores de\(z\) variados de 0 a -2 para confirmar su predicción analítica.