
8.2: Bifurcaciones en modelos 1-D de tiempo continuo
- Page ID
- 115765
Para el análisis de bifurcación, los modelos de tiempo continuo son en realidad más simples que los modelos de tiempo discreto (discutiremos las razones de esto más adelante). Entonces, comencemos con el ejemplo más simple, un sistema dinámico autónomo de primer orden de tiempo continuo con una sola variable:
\[\frac{dx}{dt} =F(x)\label{(8.1)} \]
En este caso, la matriz jacobiana es una matriz 1×1 cuyo valor propio es su propio contenido (porque es un escalar), que viene dado por\(\frac{dF}{dx}\). Dado que se trata de un modelo de tiempo continuo, la condición crítica en la que se produce una bifurcación en este sistema viene dada por
\[Re \left.\frac{dF}{dx}\right|_{x=x_{eq}} =\left.\dfrac{dF}{dx}\right|_{x=x_{eq}}=0.\label{(8.2)} \]
Trabajemos en el siguiente ejemplo:
\[\frac{dx}{dt}= r-x^{2}\label{(8.3)} \]
Lo primero que tenemos que hacer es encontrar los puntos de equilibrio, lo cual es fácil en este caso. Dejar\(\frac{dx}{dt} = 0\) inmediatamente da
\[x_{eq} =\pm\sqrt{r},\label{(8.4)} \]
lo que significa que los puntos de equilibrio existen sólo para los no negativos\(r\). La condición crítica cuando ocurre una bifurcación se da de la siguiente manera:
\[\frac{dF}{dx} =-2x\label{(8.5)} \]
\[\frac{dF}{dx}|_{x=x_{eq}}=\pm2\sqrt{r} =0\label{(8.6)} \]
\[r=0\label{(8.7)} \]
Por lo tanto, ahora sabemos que una bifurcación ocurre cuando\(r = 0\). Además, al enchufar cada solución de la Ecuación\ ref {8.4} en\(\frac{dF}{dx} = −2x\), sabemos que un punto de equilibrio es estable mientras que el otro es inestable. Estos resultados se resumen en la Tabla 8.1.
Cuadro\(\PageIndex{1}\): Resumen del análisis de bifurcación de\(dx/dt = r−x^2\).
| Punto de equilibrio | \(r < 0\) | \(0 < r\) |
|---|---|---|
| \(x_{eq} = √r\) | \ (r < 0\) ">no existe | \ (0 < r\) “> estable |
| \(x_{eq} = -√r\) | \ (r < 0\) ">no existe | < r\) “>\ (0inestable |
Hay una manera más visual de ilustrar los resultados. Se llama diagrama de bifurcación. Esto solo funciona para sistemas con una variable y un parámetro, pero sigue siendo conceptualmente útil para comprender la naturaleza de las bifurcaciones. Se puede dibujar un diagrama de bifurcación utilizando el parámetro que se varía como eje horizontal, mientras se usa la (s) ubicación (es) del punto (s) de equilibrio del sistema como eje vertical. Después dibujas cómo cada punto de equilibrio depende del parámetro, utilizando diferentes colores y/o estilos de línea para indicar la estabilidad del punto. Aquí hay un ejemplo de cómo dibujar un diagrama de bifurcación en Python:
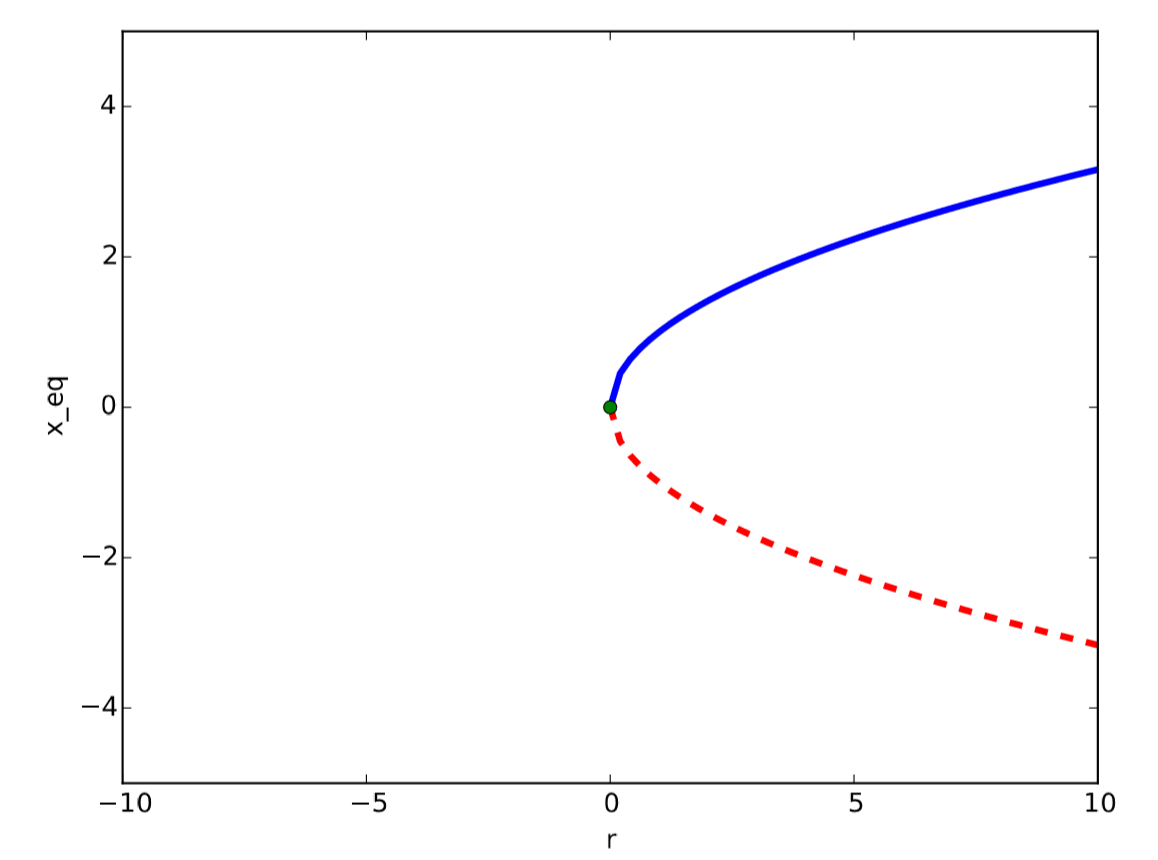
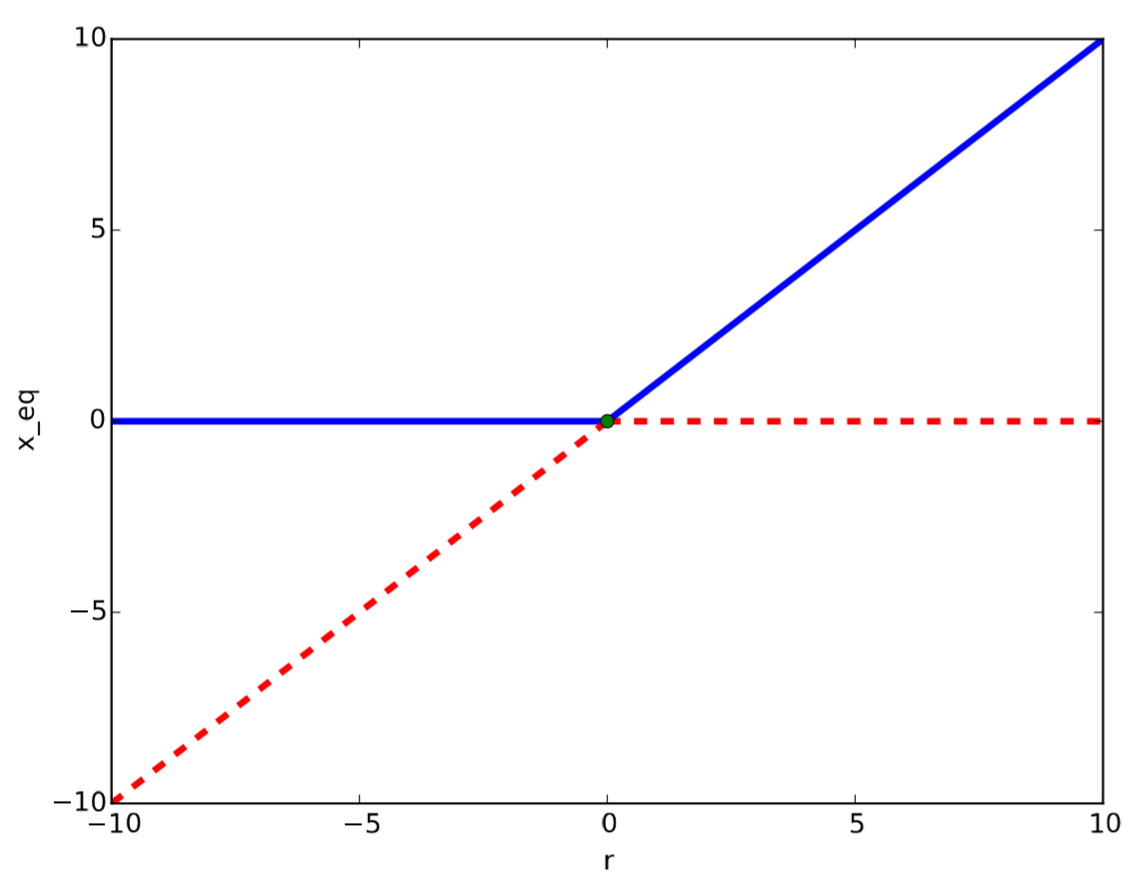
El resultado se muestra en la Fig. 8.2.1, donde la curva sólida azul indica un punto de equilibrio estable\(x_{eq} = √r\), y la curva discontinua roja indica un punto de equilibrio inestable\(x_{eq} = −√r\), con el círculo verde en el medio mostrando un punto de equilibrio neutro. Este tipo de bifurcación se llama a\(saddle-node \ bifurcation\), en la que aparecen un par de puntos de equilibrio (o chocan y aniquilan, dependiendo de qué manera varíes\(r\)).
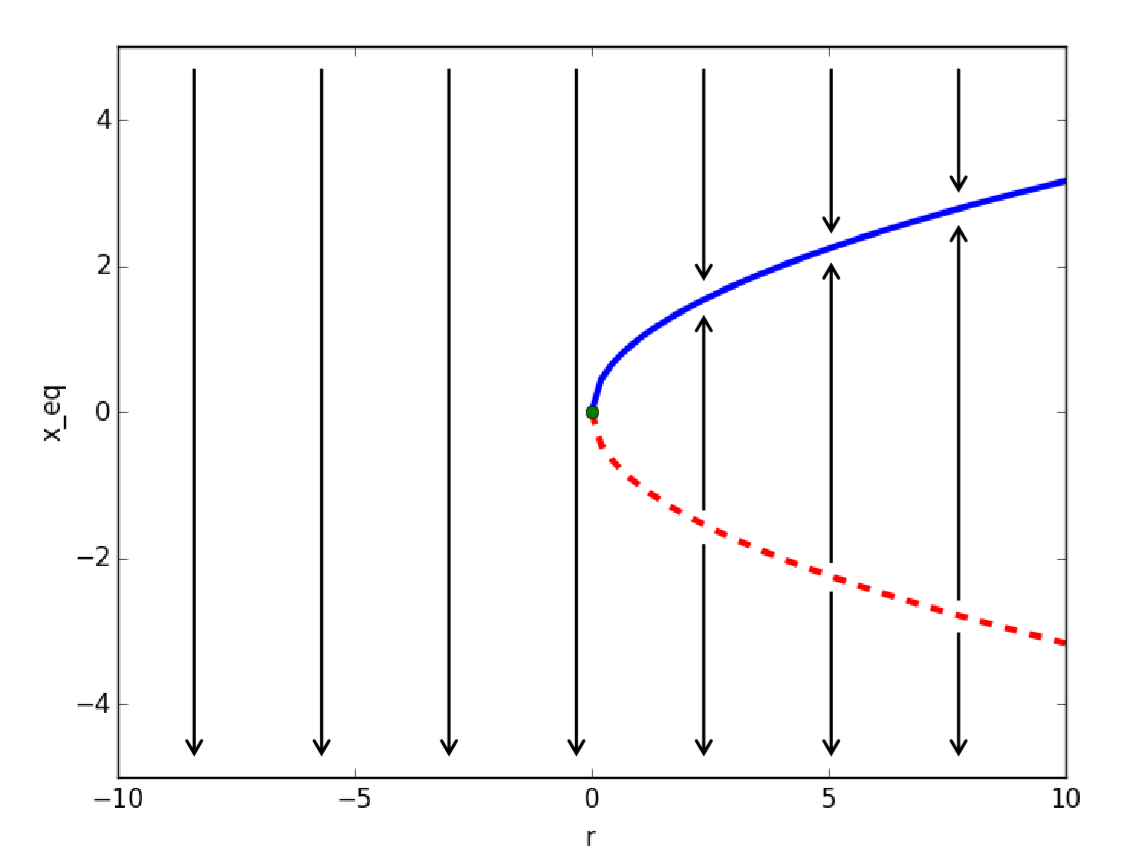
Cada corte vertical del diagrama de bifurcación para un valor de parámetro particular representa un espacio de fase del sistema dinámico que estamos estudiando. Por ejemplo, pues\(r = 5\) en el diagrama anterior, hay dos puntos de equilibrio, uno estable (azul/sólido) y el otro inestable (rojo/discontinuo). Puede visualizar los flujos del estado del sistema agregando una flecha hacia abajo sobre el punto de equilibrio estable, una flecha hacia arriba de la inestable a la estable, y luego otra flecha hacia abajo debajo de la inestable. De esta manera, queda claro que el estado del sistema está convergiendo al punto de equilibrio estable mientras está repeliendo del inestable. Si haces lo mismo para varios valores diferentes de\(r\), obtienes la Fig. 8.2.2, que muestra cómo interpretar este diagrama.
Existen otros tipos de bifurcaciones. Una bifurcación transcrítica es una bifurcación donde un punto de equilibrio “atraviesa” otro, intercambiando sus estabilidades. Por ejemplo:
\[\frac{dx}{dt} =rx-x^{2}\label{(8.8)} \]
Este sistema dinámico siempre tiene los siguientes dos puntos de equilibrio
\[x_{eq} =0,r,\label{(8.9)} \]
con la excepción de que chocan cuando\(r = 0\), que es cuando intercambian sus estabilidades. Su diagrama de bifurcación se muestra en la Fig. 8.2.3.
Otra es una bifurcación de horca, donde un punto de equilibrio se divide en tres. Dos de estos (los dos más externos) tienen la misma estabilidad que el punto de equilibrio original, mientras que el uno entre ellos tiene una estabilidad opuesta a la estabilidad del original. Hay dos tipos de bifurcaciones de horca. Una bifurcación supercrítica de horca hace un establo
punto de equilibrio dividido en tres, dos estables y uno inestable. Por ejemplo:
\[\frac{dx}{dt} =rx-x^{3}\label{(8.10)} \]
Este sistema dinámico tiene los siguientes tres puntos de equilibrio
\[x_{eq} =0\pm \sqrt{r},\label{(8.11)} \]
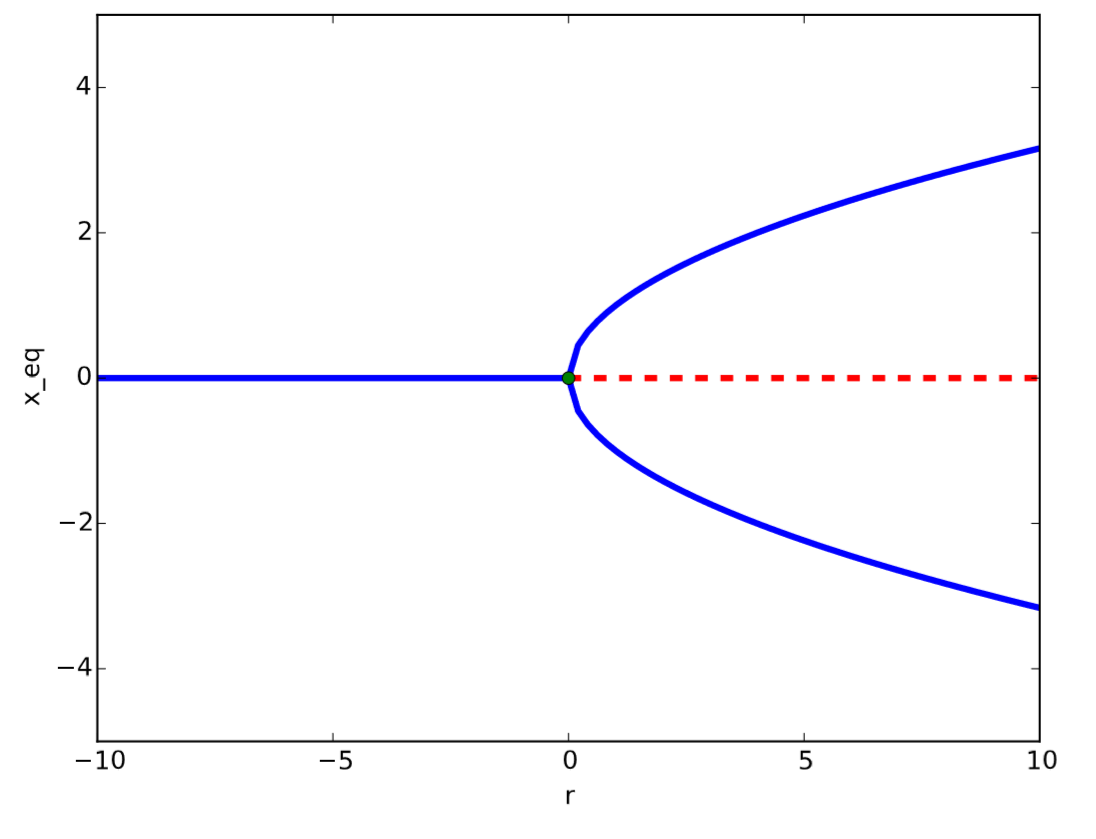
pero los dos últimos existen sólo para\(r ≥ 0\). Se puede demostrar que\(x_{eq} = 0\) es estable para\(r < 0\) e inestable para\(r > 0\), mientras que siempre\(x_{eq} = ±√r\) son estables si existen. Su diagrama de bifurcación se muestra en la Fig. 8.2.4.
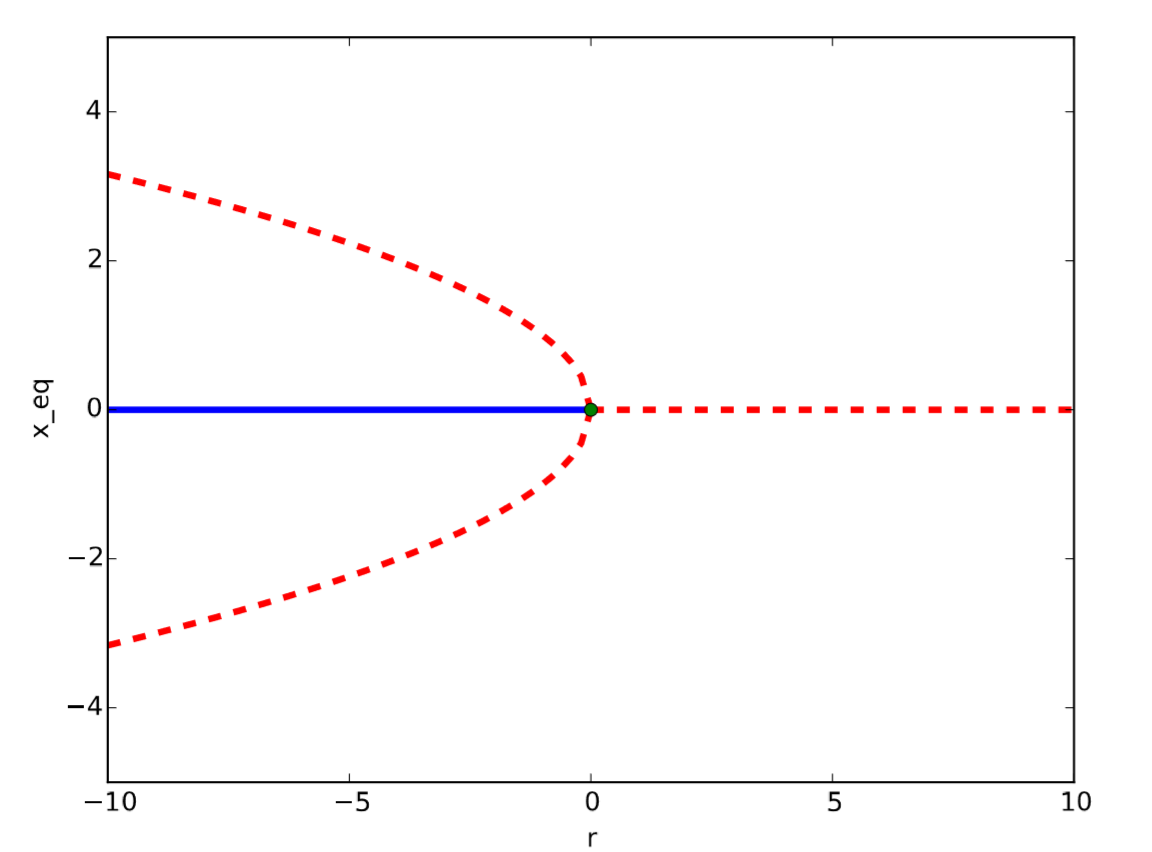
Mientras tanto, una bifurcación de horca subcrítica hace que un punto de equilibrio inestable se divida en tres, dos inestables y uno estable. Por ejemplo:
\[\frac{dx}{dt} =rx +x^{3}\label{(8.12)} \]
Este sistema dinámico tiene los siguientes tres puntos de equilibrio
\[x_{eq} =0 \pm \sqrt{-r},\label{(8.13)} \]
pero los dos últimos existen sólo para\(r ≤ 0\). Su diagrama de bifurcación se muestra en la Fig. 8.2.5.
Estas bifurcaciones también pueden surgir en formas combinadas. Por ejemplo:
\[\frac{dx}{dt} =r +x-x^{3}\label{(8.14)} \]
Este sistema dinámico tiene tres puntos de equilibrio, que son bastante complicados de calcular de manera directa. Sin embargo, si resolvemos\(\frac{dx}{dt} = 0\) en términos de\(r\), podemos obtener fácilmente
\[r=-x+x^{3},\label{(8.15)} \]
que es suficiente para dibujar el diagrama de bifurcación. También podemos conocer la estabilidad de cada punto de equilibrio calculando
\[Re\frac{dF}{dx}|_{x=x_{eq}} =1-3x^{3},\label{(8.16)} \]
es decir, cuando\(x^{2} > \frac{1}{3}\), los puntos de equilibrio son estables, de lo contrario son inestables. El diagrama de bifurcación de este sistema se muestra en la Fig. 8.2.6.
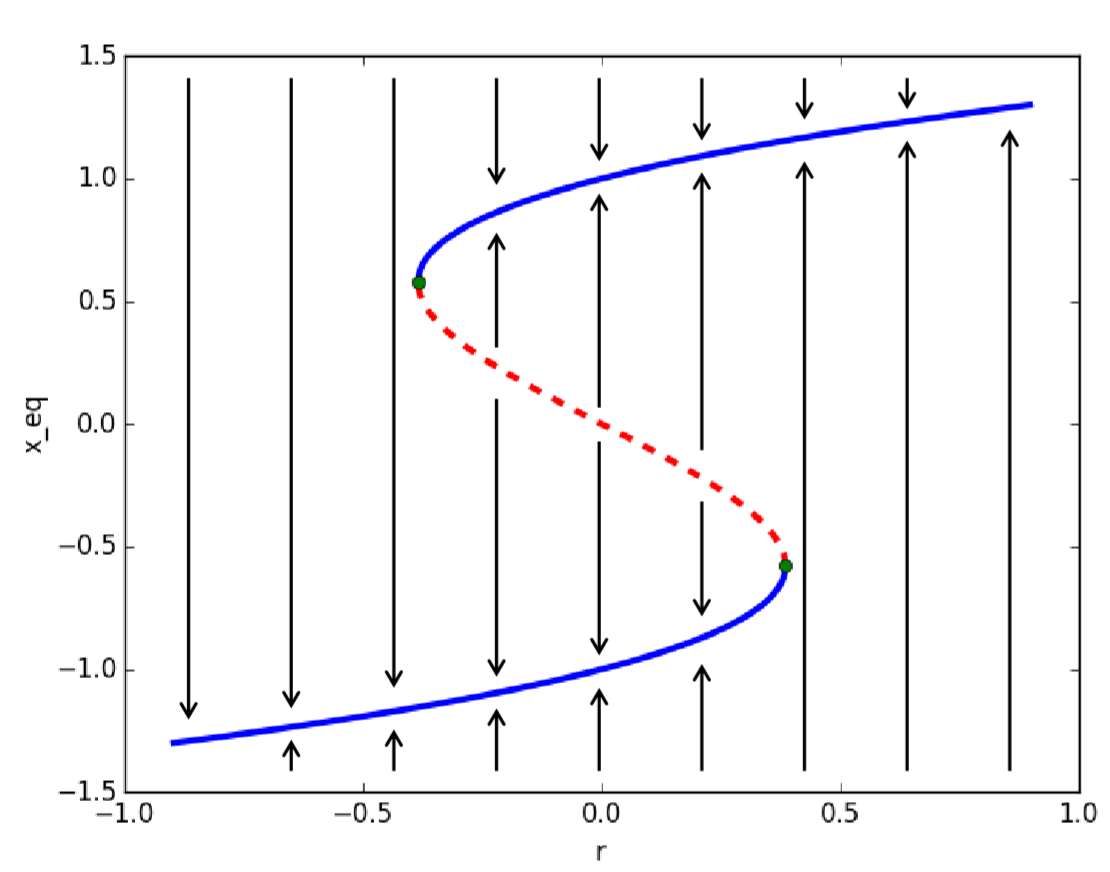
Este diagrama es una combinación de dos bifurcaciones de nodo de silla de montar, mostrando que este sistema tiene histéresis como su propiedad dinámica. La histéresis es la dependencia de la salida de un sistema (estado asintótico en este caso) no sólo de la entrada (parámetro\(r\) en este caso) sino también de su historia. Para entender lo que esto significa, imagina que estás cambiando lentamente\(r\) de\(-1\) hacia arriba. Inicialmente, el estado del sistema se mantiene en el equilibrio estable en la parte inferior del diagrama, que continúa hasta alcanzar un umbral crítico en\(r ≈ 0.4\). Tan pronto como cruzas este umbral, el estado del sistema salta repentinamente a otro punto de equilibrio estable en la parte superior del diagrama. Un salto tan repentino en el estado del sistema suele llamarse catástrofe. Te enojas e intentas llevar el estado del sistema de vuelta a donde estaba, reduciendo\(r\). Sin embargo, en contra de sus expectativas, el estado del sistema sigue siendo alto incluso después de reducir\(r\) por debajo\(0.4\). Esto es histéresis; el estado asintótico del sistema depende no sólo de\(r\), sino también de dónde se encontraba su estado en el pasado inmediato. Es decir, el estado del sistema funciona como memoria de su historia. Para que el estado del sistema vuelva a bajar al valor original, hay que gastar un esfuerzo extra para reducir r completamente por debajo de otro umbral crítico,\(r ≈−0.4\).
Tal histéresis podría ser útil; cada bit (dígito binario) de la memoria de la computadora tiene este tipo de dinámica de bifurcación, razón por la cual podemos almacenar información en ella. Pero en otros contextos, la histéresis podría ser devastadora, si el estado de un ecosistema tiene esta propiedad (muchos estudios indican que sí), se necesita una gran cantidad de esfuerzo y recursos para revertir un ecosistema desierto a un hábitat con vegetación, por ejemplo.
Realizar un análisis de bifurcación del siguiente sistema dinámico con parámetro\(r\):
\[\frac{dx}{dt} =rx(x+1)-x \label{(8.17)} \]
Encontrar el umbral crítico\(r\) en el que se produce una bifurcación. Dibuja un diagrama de bifurcación y determina qué tipo de bifurcación es.
Supongamos que dos empresas, A y B, están compitiendo entre sí por la participación de mercado en una región local. Que x e y sean la cuota de mercado de A y B, respectivamente. Suponiendo que no hay otros competidores de terceros,\(x + y = 1\) (100%), y por lo tanto este sistema puede entenderse como un sistema de una variable. El crecimiento/decaimiento de la cuota de mercado de A puede modelarse así como
\[\frac{dx}{dt} =ax(1-x)(x-y), \label{(8.18)} \]
aquí x es la cuota de mercado actual de A,\(1−x\) es el tamaño de la base de clientes potenciales disponibles, y\(x − y\) es la ventaja competitiva relativa de A, que se puede reescribir como\(x−(1−x) = 2x−1\). Obtener puntos de equilibrio de este sistema y sus estabilidades. Luego haga una suposición adicional de que este mercado regional está conectado e impulsado por un mercado global mucho más grande, donde la cuota de mercado de la compañía A se mantiene de alguna manera en p (cuyo cambio es muy lento para que podamos considerarlo constante):
\[\frac{dx}{dt} =ax(1-x)(x-y)+r(p-x) \label{(8.19)} \]
Aquí\(r\) está la fuerza de la influencia del mercado global al local. Determinar una condición crítica respecto\(r\) y\(p\) en la que ocurre una bifurcación en este sistema. Dibuje su diagrama de bifurcación variando\(r\) con\(a = 1\) y\(p = 0.5\), y determine qué tipo de bifurcación es. Finalmente, utilizando los resultados del análisis de bifurcación, discuta qué tipo de estrategia de marketing tomarías si fueras director de un departamento de marketing de una empresa que actualmente está abrumada por su competidor en el mercado local. ¿Cómo se puede “flip” el mercado?