
6.3: Principio Máximo
- Page ID
- 118010

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)\(\Omega\subset \mathbb{R}^n\)Déjese ser un dominio acotado. Set
\ begin {eqnarray*}
D_T&=&\ Omega\ times (0, T),\\ T>0,\\
S_T&=&\ {(x, t):\ (x, t)\ in\ Omega\ tiempos\ {0\}\\ mbox {o}\ (x, t)\ in\ parcial\ Omega\ tiempos [0, T]\},
\ fin {eqnarray*}
ver Figura 6.3.1.
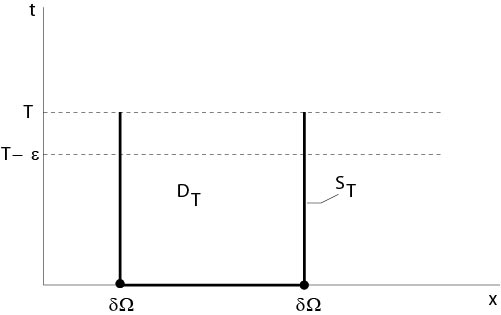
Figura 6.3.1: Notaciones al principio máximo
Teorema 6.2
Asumir\(u\in C(\overline{D_T})\)\(u_t\), eso,\(u_{x_ix_k}\) existir y son continuos en\(D_T\), y
$$u_t-\ triángulo u\ le 0\\\ mbox {in}\ D_T.\]
Entonces
$$\ max_ {\ overline {D_T}} u (x, t) =\ max_ {S_T} u.\]
Prueba
Asumir inicialmente\(u_t-\triangle u<0\) en\(D_T\). Dejar\(\varepsilon>0\) ser pequeño y\(0<\varepsilon<T\). Ya que\(u\in C(\overline{D_{T-\varepsilon}})\), hay\((x_0,t_0) \in \overline{D_{T-\varepsilon}}\) tal que
$$u (x_0, t_0) =\ max_ {\ overline {D_ {T-\ varepsilon}}} u (x, t).\]
Caso (i)
Vamos\((x_0,t_0)\in D_{T-\varepsilon}\). De ahí que, dado que\(D_{T-\varepsilon}\) está abierto,
\(u_t(x_0,t_0)=0\),\(u_{x_l}(x_0,t_0)=0\),\(l=1,\ldots,n\) y
$$\ sum_ {l, k=1} ^n u_ {x_lx_k} (x_0, t_0)\ zeta_l\ zeta_k\ le0\\\ mbox {para todos}\\ zeta\ in\ mathbb {R} ^n.\]
La desigualdad anterior implica eso\(u_{x_kx_k}(x_0,t_0)\le0\) para cada uno\(k\). Así llegamos a una contradicción para\(u_t-\triangle u<0\) entrar\(D_T\).
Caso (ii)
Asumir\((x_0,t_0)\in\Omega\times\{T-\varepsilon\}\). Entonces se deduce como arriba\(\triangle u\le 0\) en\((x_0,t_0)\), y de\(u(x_0,t_0)\ge u(x_0,t)\),\(t\le t_0\), se concluye que\(u_t(x_0,t_0)\ge0\). Llegamos a una contradicción para\(u_t-\triangle u<0\) entrar de\(D_T\) nuevo.
Resumiendo, hemos demostrado que
$$\ max_ {\ overline {D_ {T-\ varepsilon}}} u (x, t) =\ max_ {T-\ varepsilon} u (x, t).\]
Por lo tanto, existe\((x_\varepsilon,t_\varepsilon)\in S_{T-\varepsilon}\) tal que
$$u (x_\ varepsilon, t_\ varepsilon) =\ max_ {\ overline {D_ {T-\ varepsilon}}} u (x, t).\]
Ya que\(u\) es continuo\(\overline{D}_T\), tenemos
$$\ lim_ {\ varepsilon\ a 0}\ max_ {\ overline {D_ {T-\ varepsilon}} u (x, t) =\ max_ {\ overline {D_T}} u (x, t).\]
De ello se deduce que hay\((\overline{x},\overline{t})\in S_T\) tal que
$$u (\ overline {x},\ overline {t}) =\ max_ {\ overline {D_T}} u (x, t)\]
ya que\(S_{T-\varepsilon}\subset S_T\) y\(S_T\) es compacto. Así, el teorema se muestra bajo el supuesto\(u_t-\triangle u<0\) en\(D_T\). Ahora asuma\(u_t-\triangle u\le 0\) en\(D_T\). Set
$$v (x, t) :=u (x, t) -kt,\]
donde\(k\) es una constante positiva. Entonces
$$v_t-\ triángulo v=u_t-\ triángulo u-k<0.\]
Desde arriba tenemos
\ begin {eqnarray*}
\ max_ {\ overline {D_T}} u (x, t) &=&\ max_ {\ overline {\ overline {D_T}} (v (x, t) +kt)\\ &\
le&\ max_ {\ overline {D_T}} v (x, t) +kt\\ &=&\ max_ {S_T} v (x, t) +kt\\
&=&\ max_ {S_T} v (x, t) t) +kT\\ &\ le&\ max_ {S_T} u (x, t) +kT,
\ fin {eqnarray*}
Dejando\(k\to 0\), obtenemos
$$\ max_ {\ overline {D_T}} u (x, t)\ le\ max_ {S_T} u (x, t).\]
Ya que\(S_T\subset\overline{D_T}\), se muestra el teorema.
\(\Box\)
Si reemplazamos en el teorema anterior el dominio acotado\(\Omega\) por\(\mathbb{R}^n\), entonces el resultado sigue siendo verdadero siempre que supongamos una suposición de crecimiento {\ it adicional} para\(u\). Más precisamente, tenemos el siguiente resultado que es un corolario del teorema anterior. Set para un fijo\(T\),\(0<T<\infty\),
$$D_T=\ {(x, t):\ x\ in\ mathbb {R} ^n,\ 0<t<t\}.\]
Proposición 6.2
Asumir\(u\in C(\overline{D_T})\)\(u_t\), eso,\(u_{x_ix_k}\) existir y son continuos en\(D_T\),
$$u_t-\ triángulo u\ le 0\\\ mbox {in}\ D_T,\]
y adicionalmente que\(u\) satisfaga la condición de crecimiento
$$u (x, t)\ le Me^ {a|x|^2},\]
donde\(M\) y\(a\) son constantes positivas.
Entonces
$$\ max_ {\ overline {D_T}} u (x, t) =\ max_ {S_T} u.\]
De ello se desprende de inmediato la
Corolario
El problema de valor inicial\(u_t-\triangle u=0\) en\(D_T\)\(u(x,0)=f(x)\),\(x\in\mathbb{R}^n\),, tiene una solución única en la clase definida por\(u\in C(\overline{D_T})\),\(u_t\),\(u_{x_ix_k}\) existir y son continuos en\(D_T\) y\(|u(x,t)|\le Me^{a|x|^2}\).
Comprobante de la Proposición 6.2.
Ver [10], pp. 217. Podemos suponer que\(4aT<1\), dado que el intervalo finito se puede dividir en finitos muchos intervalos de igual longitud\(\tau\) con
\(4a\tau<1\). Luego concluimos sucesivamente para\(k\) eso
$$u (x, t)\ le\ sup_ {y\ in\ mathbb {R} ^n} u (y, k\ tau)\ le\ sup_ {y\ in\ mathbb {R} ^n} u (y,0)\]
para\(k\tau\le t\le (k+1)\tau\),\(k=0,\ldots, N-1\), donde\(N=T/\tau\).
Hay\(\epsilon>0\) tal que\(4a(T+\epsilon)<1\). Considere la función de comparación
\ begin {eqnarray*}
v_\ mu (x, t) :&=&u (x, t) -\ mu\ left (4\ pi (T+\ epsilon-t)\ right) ^ {-n/2} e^ {|x-y|^2/ (4 (T+\ epsilon-t))}\\
&=&u (x, t) -\ mu K (ix, iy, T+\ épsilon-t)
\ fin {eqnarray*}
para fijo\(y\in\mathbb{R}^n\) y para una constante\(\mu>0\). Dado que el núcleo de calor\(K(ix,iy,t)\) satisface\(K_t=\triangle K_x\), obtenemos
$$\ frac {\ parcial} {\ parcial t} v_\ mu-\ triángulo v_\ mu=u_t-\ triángulo u\ le0.\]
Establecer para una constante\(\rho>0\)
$$D_ {T,\ rho} =\ {(x, t):\ |x-y|<\ rho,\ 0<t<t\}.\]
Luego obtenemos del Teorema 6.2 que
$$v_\ mu (y, t)\ le\ max_ {S_ {T,\ rho}} v_\ mu,\]
donde\(S_{T,\rho}\equiv S_T\) del Teorema 6.2 con\(\Omega=B_\rho(y)\), ver Figura 6.3.1.
En la parte inferior de\(S_{T,\rho}\) tenemos, ya que\(\mu K>0\),
$$v_\ mu (x,0)\ le u (x,0)\ le\ sup_ {z\ in\ mathbb {R} ^n} f (z).\]
En la parte del cilindro\(|x-y|=\rho\),\(0\le t\le T\), de\(S_{T,\rho}\) ella es
\ begin {eqnarray*}
v_\ mu (x, t) &\ Le&me^ {a|x|^2} -\ mu\ left (4\ pi (T+\ epsilon-t)\ right) ^ {-n/2} e^ {\ rho^2/ (4 (T+\ épsilon-t))}\\
&\ Le&me^ {a (|y|y|+\ rho) ^2} -\ mu\ izquierda (4\ pi (T+\ épsilon)\ derecha) ^ {-n/2} e^ {\ rho^2/ (4 (T+\ épsilon))}\\
&\ le&\ sup_ {z\ in\ mathbb {R} ^n} f (z)
\ end {eqnarray*}
para todos\(\rho>\rho_0(\mu)\),\(\rho_0\) suficientemente grandes. Eso lo recordamos\(4a(T+\epsilon)<1\).
Resumiendo, tenemos
$$\ max_ {S_ {T,\ rho}} v_\ mu (x, t)\ le\ sup_ {z\ in\ mathbb {R} ^n} f (z)\]
si\(\rho>\rho_0(\mu)\). Así
$$v_\ mu (y, t)\ le\ max_ {S_ {T,\ rho}} v_\ mu (x, t)\ le\ sup_ {z\ in\ mathbb {R} ^n} f (z)\]
si\(\rho>\rho_0(\mu)\).
Desde
$$v_\ mu (y, t) =u (y, t) -\ mu\ izquierda (4\ pi (T+\ épsilon-t)\ derecha) ^ {-n/2}\]
se sigue
$$u (y, t) -\ mu\ izquierda (4\ pi (T+\ épsilon-t)\ derecha) ^ {-n/2}\ le\ sup_ {z\ in\ mathbb {R} ^n} f (z).\]
Dejando\(\mu\to0\), obtenemos la aseveración de la proposición.
\(\Box\)
El principio máximo anterior del Teorema 6.2 se mantiene para una gran clase de operadores diferenciales parabólicos, incluso para ecuaciones degeneradas.
Set
$$Lu=\ suma_ {i, j=1} ^na^ {ij} (x, t) u_ {x_ix_j},\]
donde\(a^{ij}\in C(D_T)\) son reales,\(a^{ij}=a^{ji}\), y la matriz no\((a^{ij})\) es negativa, es decir,
$$\ sum_ {i, j=1} ^na^ {ij} (x, t)\ zeta_i\ zeta_j\ ge 0\\\ mbox {para todos}\\ zeta\ in\ mathbb {R} ^n,\]
y\((x,t)\in D_T\).
Teorema 6.3
Asumir\(u\in C(\overline{D_T})\)\(u_t\), eso,\(u_{x_ix_k}\) existir y son continuos en\(D_T\), y
$$u_t-L u\ le 0\\\ mbox {in}\ D_T.\]
Entonces
$$\ max_ {\ overline {D_T}} u (x, t) =\ max_ {S_T} u.\]
Prueba
(i) Una prueba es consecuencia del siguiente lema: let\(A\), matrices\(B\) reales, simétricas y no negativas. No negativo significa que todos los valores propios son no negativos. Después traza~\((AB)\equiv\sum_{i,j=1}^na^{ij}b_{ij}\ge0\), ver un ejercicio.
(ii) Otra prueba es más directamente: let\(U=(z_1,\ldots,z_n)\), donde\(z_l\) se encuentra un sistema ortonormal de vectores propios a los valores propios\(\lambda_l\) de la matriz\(A=(a^{i,j}(x_0,t_0))\). Establecer\(\zeta=U\eta\),\(x=U^T(x-x_0)y\) y\(v(y)=u(x_0+Uy,t_0)\), luego
\ begin {eqnarray*}
0&\ le&\ sum_ {i, j=1} ^na^ {ij} (x_0, t_0)\ zeta_i\ zeta_j=\ suma_ {i=1} ^n\ lambda_i\ eta_i^2\\
0&\ ge&\ sum_ {i, j=1} ^n u_ {x_ix_j}\ zeta_i\ zeta_j=\ suma_ {i=1} ^n v_ {y_iy_i}\ eta_i^2.
\ end {eqnarray*}
Sigue\(\lambda_i\ge0\) y\(v_{y_iy_i}\le0\) para todos\(i\).
Consecuentemente
$$\ suma_ {i, j=1} ^na^ {ij} (x_0, t_0) u_ {x_ix_j} (x_0, t_0) =\ suma_ {i=1} ^n\ lambda_iv_ {y_iy_i}\ le0.\]
\(\Box\)