7.9: El Periodo del Péndulo No Lineal
- Page ID
- 119676

RECUERDA QUE EL PERÍODO DEL PENDULO SIMPLE viene dado
\[T=\dfrac{2 \pi}{\omega}=2 \pi \sqrt{\dfrac{L}{g}} \nonumber \]
para
\[\omega \equiv \sqrt{\dfrac{g}{L}} \nonumber \]
Esto se basó en la resolución de la ecuación del péndulo lineal 7.5.2. Esta ecuación se derivó asumiendo una pequeña aproximación de ángulo. ¿Qué tan buena es esta aproximación? ¿Qué se entiende por un ángulo pequeño?
Recordamos que la aproximación de la serie Taylor de\(\sin \theta\) aproximadamente\(\theta=0\):
\[\sin \theta=\theta-\dfrac{\theta^{3}}{3 !}+\dfrac{\theta^{5}}{5 !}+\ldots \nonumber \]
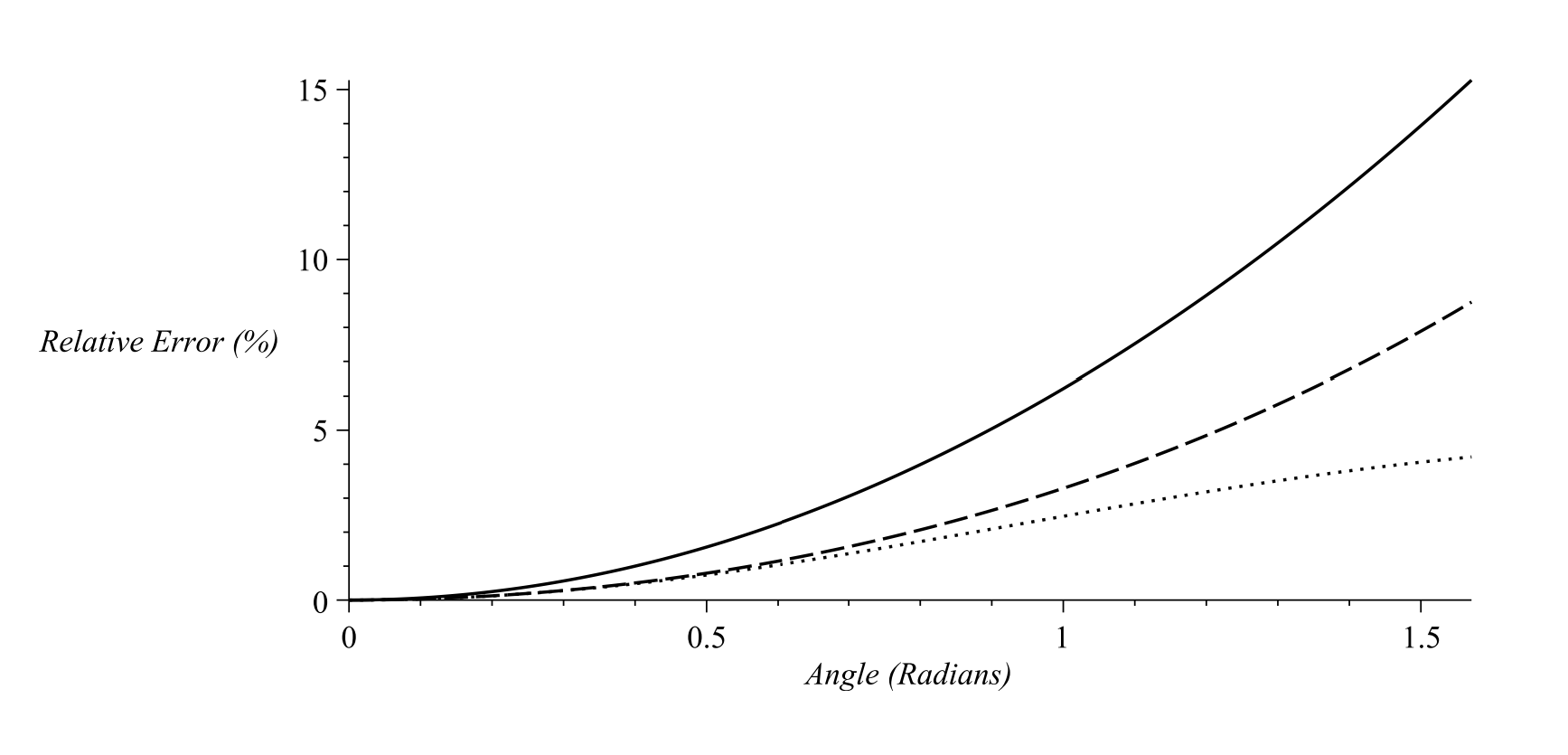
Se puede obtener un límite sobre el error al truncar esta serie a un término después de tomar un curso de análisis numérico. Pero podemos simplemente trazar el error relativo, que se define como
\[\text { Relative Error }=\left|\dfrac{\sin \theta-\theta}{\sin \theta}\right| \nonumber. \nonumber \]
Una gráfica del error relativo se da en la Figura\(\PageIndex{1}\). Por lo tanto, para\(\theta \approx 0.4\) radianes
\(\left(\right.\)o,\(\left.23^{\circ}\right)\) tenemos que se trata del error relativo\(2.6 \%\).
(Error relativo en\(\sin \theta\) la aproximación). Nos gustaría hacerlo mejor que esto. Entonces, ahora pasamos a la ecuación de péndulo no lineal 7.5.1 en la forma más simple
\[\ddot{\theta}+\omega^{2} \sin \theta=0 \nonumber \]
(Solución de la ecuación de péndulo no lineal). A continuación empleamos una técnica que es útil para ecuaciones de la forma
\[\ddot{\theta}+F(\theta)=0 \nonumber \]
cuando es fácil integrar la función\(F(\theta)\). A saber, observamos que
\[\dfrac{d}{d t}\left[\dfrac{1}{2} \dot{\theta}^{2}+\int^{\theta(t)} F(\phi) d \phi\right]=(\ddot{\theta}+F(\theta)) \dot{\theta}\nonumber \]
Para el problema del péndulo no lineal, multiplicamos la ecuación\(\PageIndex{4}\) por\(\dot{\theta}\),
\[\ddot{\theta} \dot{\theta}+\omega^{2} \sin \theta \dot{\theta}=0 \nonumber \]
y tenga en cuenta que el lado izquierdo de esta ecuación es una derivada perfecta. Por lo tanto,
\[\dfrac{d}{d t}\left[\dfrac{1}{2} \dot{\theta}^{2}-\omega^{2} \cos \theta\right]=0 \nonumber \]
Por lo tanto, la cantidad entre paréntesis es una constante. Entonces, podemos escribir
\[\dfrac{1}{2} \dot{\theta}^{2}-\omega^{2} \cos \theta=c \nonumber \]
Resolviendo para\(\dot{\theta}\), obtenemos
\[\dfrac{d \theta}{d t}=\sqrt{2\left(c+\omega^{2} \cos \theta\right)}\nonumber \]
Esta ecuación es una ecuación separable de primer orden y podemos reorganizar e integrar los términos para encontrar que
\[t=\int d t=\int \dfrac{d \theta}{\sqrt{2\left(c+\omega^{2} \cos \theta\right)}}\nonumber \]
Por supuesto, tenemos que ser capaces de hacer la integral. Cuando uno encuentra una solución en esta forma implícita, se dice que el problema ha sido resuelto por cuadraturas. Es decir, la solución se da en términos de alguna integral.
De hecho, la integral anterior puede transformarse en lo que se conoce como una integral elíptica de primer tipo. Reescribiremos este resultado y luego lo usaremos para obtener una aproximación al período de oscilación del péndulo no lineal, dando lugar a correcciones al resultado lineal encontrado anteriormente.
Primero reescribiremos la constante que se encuentra en la Ecuación\(\PageIndex{5}\). Esto requiere un poco de física. El balanceo de una masa sobre una cuerda, asumiendo que no hay pérdida de energía en el punto de pivote, es un proceso conservador. A saber, se conserva la energía mecánica total. Así, el total de las energías potenciales cinéticas y gravitacionales es una constante. La energía cinética de la masa en la cuerda se da como
\[T=\dfrac{1}{2} m v^{2}=\dfrac{1}{2} m L^{2} \dot{\theta}^{2}\nonumber \]
La energía potencial es la energía potencial gravitacional. Si establecemos la energía potencial a cero en la parte inferior del columpio, entonces la energía potencial es\(U=m g h\), dónde\(h\) está la altura a la que está la masa desde el fondo del columpio. Un poco de trigonometría da eso\(h=L(1-\cos \theta) .\) Entonces,
\[U=m g L(1-\cos \theta) \nonumber \]
(Energía mecánica total para el péndulo no lineal). Entonces, la energía mecánica total es
\[E=\dfrac{1}{2} m L^{2} \dot{\theta}^{2}+m g L(1-\cos \theta) \nonumber \]
Observamos que un poco de reorganización muestra que podemos relacionar este resultado con la Ecuación de la Ecuación\(\PageIndex{5}\). Dividiendo por\(m\)\(L^{2}\) y y usando la definición de\(\omega^{2}=g / L\), tenemos
\[\dfrac{1}{2} \dot{\theta}^{2}-\omega^{2} \cos \theta=\dfrac{1}{m L^{2}} E-\omega^{2} \nonumber \]
Por lo tanto, hemos determinado la constante de integración en términos de la energía mecánica total,
\[c=\dfrac{1}{m L^{2}} E-\omega^{2} \nonumber \]
Podemos usar Ecuación\(\PageIndex{6}\) para obtener un valor para la energía total. En la parte superior del columpio la masa no se mueve, aunque sólo sea por un momento. Así, la energía cinética es cero y la energía mecánica total es energía potencial pura. Dejando\(\theta_{0}\) denotar el ángulo en la posición angular más alta, tenemos que
\[E=m g L\left(1-\cos \theta_{0}\right)=m L^{2} \omega^{2}\left(1-\cos \theta_{0}\right) \nonumber \]
Por lo tanto, hemos encontrado que
\[\dfrac{1}{2} \dot{\theta}^{2}-\omega^{2} \cos \theta=-\omega^{2} \cos \theta_{0} \nonumber \]
Podemos resolver\(\dot{\theta}\) e integrar la ecuación diferencial para obtener
\[t=\int d t=\int \dfrac{d \theta}{\omega \sqrt{2\left(\cos \theta-\cos \theta_{0}\right)}}\nonumber \]
Usando la fórmula de medio ángulo,
\[\sin ^{2} \dfrac{\theta}{2}=\dfrac{1}{2}(1-\cos \theta)\nonumber \]
podemos reescribir el argumento en el radical como
\[\cos \theta-\cos \theta_{0}=2\left[\sin ^{2} \dfrac{\theta_{0}}{2}-\sin ^{2} \dfrac{\theta}{2}\right] \nonumber \]
Al señalar que una moción de\(\theta=0\) a\(\theta=\theta_{0}\) es un cuarto de ciclo, tenemos que
\[T=\dfrac{2}{\omega} \int_{0}^{\theta_{0}} \dfrac{d \theta}{\sqrt{\sin ^{2} \dfrac{\theta_{0}}{2}-\sin ^{2} \dfrac{\theta}{2}}} \nonumber \]
Este resultado ahora se puede transformar en una integral elíptica. \({ }^{1}\)Definimos
\[z=\dfrac{\sin \dfrac{\theta}{2}}{\sin \dfrac{\theta_{0}}{2}} \nonumber \]
y
\[k=\sin \dfrac{\theta_{0}}{2}\nonumber \]
Entonces, la ecuación\(\PageIndex{8}\) se convierte
\[T=\dfrac{4}{\omega} \int_{0}^{1} \dfrac{d z}{\sqrt{\left(1-z^{2}\right)\left(1-k^{2} z^{2}\right)}} \nonumber \]
Esto se hace al señalar eso\(d z=\dfrac{1}{2 k} \cos \dfrac{\theta}{2} d \theta=\dfrac{1}{2 k}\left(1-k^{2} z^{2}\right)^{1 / 2} d \theta\) y aquello\(\sin ^{2} \dfrac{\theta_{0}}{2}-\sin ^{2} \dfrac{\theta}{2}=k^{2}\left(1-z^{2}\right)\). La integral en este resultado se llama la integral elíptica completa del primer tipo.
- 1
-
Las integrales elípticas fueron estudiadas por primera vez por Leonhard Euler y Giulio Carlo de' Toschi di Fagnano\((1682-1766)\), quienes estudiaron las longitudes de curvas como la elipse y la lemniscada,
\[\left(x^{2}+y^{2}\right)^{2}=x^{2}-y^{2}. \nonumber \]
Observamos que la integral elíptica incompleta del primer tipo se define como
\[F(\phi, k) \equiv \int_{0}^{\phi} \dfrac{d \theta}{\sqrt{1-k^{2} \sin ^{2} \theta}}=\int_{0}^{\sin \phi} \dfrac{d z}{\sqrt{\left(1-z^{2}\right)\left(1-k^{2} z^{2}\right)}} \nonumber \]
(Las integrales elípticas completas e incompletas del primer tipo). Luego, la integral elíptica completa del primer tipo viene dada por\(K(k)= F(\dfrac{\pi}{2}, k)\), or
\[K(k)=\int_{0}^{\pi / 2} \dfrac{d \theta}{\sqrt{1-k^{2} \sin ^{2} \theta}}=\int_{0}^{1} \dfrac{d z}{\sqrt{\left(1-z^{2}\right)\left(1-k^{2} z^{2}\right)}} \nonumber \]
Por lo tanto, el periodo del péndulo no lineal viene dado por
\[T=\dfrac{4}{\omega} K\left(\sin \dfrac{\theta_{0}}{2}\right) \nonumber \]
Hay tabla de valores para integrales elípticas. Sin embargo, se puede usar un sistema de álgebra computacional para calcular los valores de tales integrales. Buscaremos pequeñas aproximaciones de ángulo.
Para ángulos pequeños\(\left(\theta_{0} \ll \dfrac{\pi}{2}\right)\), tenemos que\(k\) es pequeño. Entonces, podemos desarrollar una expansión en serie para el periodo,\(T\), para pequeños\(k\). Esto se hace simplemente usando la expansión binomial,
\[\left(1-k^{2} z^{2}\right)^{-1 / 2}=1+\dfrac{1}{2} k^{2} z^{2}+\dfrac{3}{8} k^{2} z^{4}+O\left((k z)^{6}\right)\nonumber \]
Insertando esta expansión en el integrando para la integral elíptica completa y término integrador por término, encontramos que
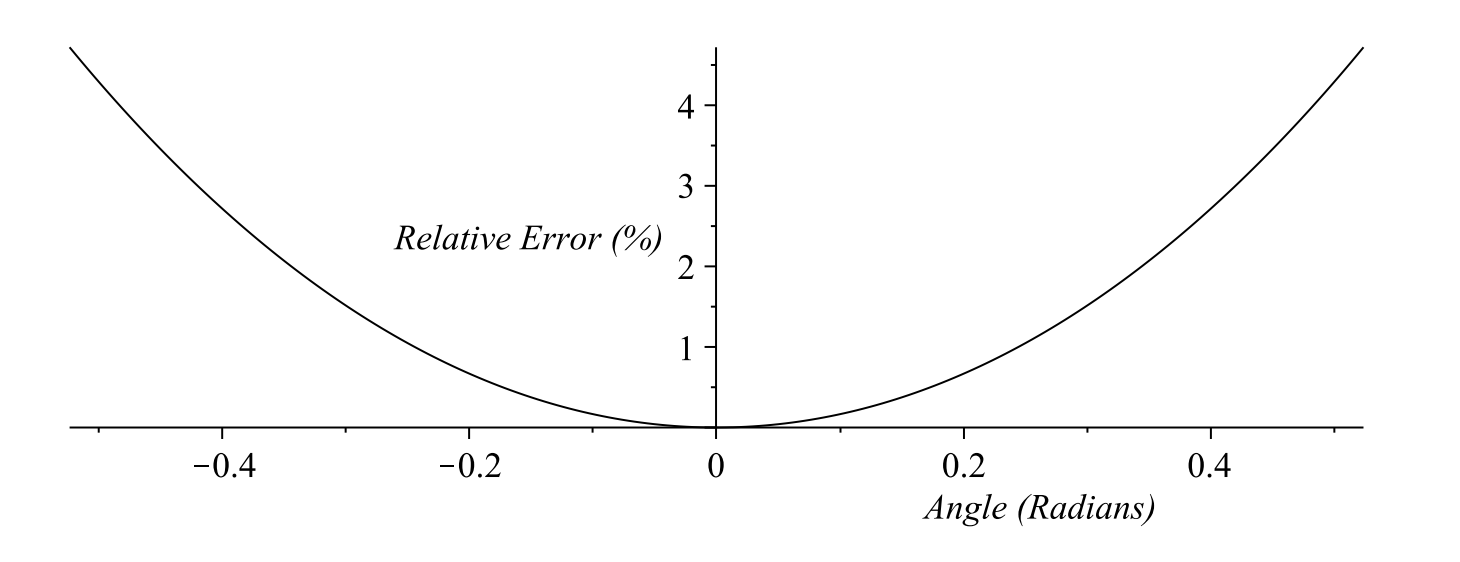
\[T=2 \pi \sqrt{\dfrac{L}{g}}\left[1+\dfrac{1}{4} k^{2}+\dfrac{9}{64} k^{4}+\ldots\right] \nonumber \]
El primer término de la expansión da el conocido período del péndulo simple para ángulos pequeños. Los siguientes términos de la expresión dan más correcciones al resultado lineal que son útiles para amplitudes de oscilación mayores. En la Figura\(\PageIndex{2}\), se muestran los errores relativos incurridos al mantener los términos\(k^{2}\) (cuadrático) y\(k^{4}\) (cuártico) en comparación con el valor exacto del periodo.