
17.2: Modelo proyectivo
- Page ID
- 114450

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La siguiente imagen ilustra el mapa\(P\mapsto \hat{P}\) descrito en la sección anterior — si tomas la foto de la izquierda y aplicas el mapa\(P\mapsto \hat P\), obtienes la imagen a la derecha. Las imágenes son modelo conforme y proyectivo del plano hiperbólico respectivamente. El mapa\(P\mapsto \hat P\) es una “traducción” de uno a otro.

En el modelo proyectivo las cosas se ven diferentes; algunas se vuelven más simples, otras cosas se vuelven más complicadas.
Las líneas h en el modelo proyectivo son acordes de lo absoluto; más precisamente, acordes sin sus puntos finales.
Esta observación puede ser utilizada para transferir declaraciones sobre líneas y puntos del plano euclidiano al plano h. Como ejemplo, expongamos una versión hiperbólica del teorema de Pappus para el plano h.
Supongamos que dos triples de los puntos h\(A\)\(B\)\(C\),, y\(A'\),\(B'\),\(C'\) en el plano h son h-colineales. Supongamos que los puntos h\(X\)\(Y\),, y\(Z\) están definidos por
\(\begin{aligned} X&=(BC')_h\cap(B'C)_h, & Y&=(CA')_h\cap(C'A)_h, & Z&=(AB')_h \cap(A'B)_h.\end{aligned}\)
Entonces los puntos\(X\),\(Y\),\(Z\) son h-colineales.
En el modelo proyectivo, esta afirmación se desprende inmediatamente del teorema original de Pappus 15.6.2. Lo mismo se puede hacer para el teorema de Desargues 15.6.1. El mismo argumento muestra que la construcción de una línea tangente con una regla solo descrita en el Ejercicio 15.8.2 funciona también en el plano h.
Por otra parte, tenga en cuenta que no es nada fácil probar esta afirmación utilizando el modelo conformal.
Los círculos h y los equidistantes en el modelo proyectivo son ciertos tipos de elipses y sus arcos abiertos.
Se deduce ya que la proyección estereográfica envía círculos en el plano a círculos en la esfera unitaria y la proyección del punto del pie del círculo de regreso al plano es una elipse. (Se puede definir elipse como una proyección de punto de pie de un círculo).
Considera un par de puntos h\(P\) y\(Q\). Dejar\(A\) y\(B\) ser el punto ideal de la línea h en el modelo proyectivo; es decir,\(A\) y\(B\) son las intersecciones de la línea euclidiana\((PQ)\) con lo absoluto.
Entonces por Lema 17.1.1,
asumiendo que los puntos\(A, P, Q, B\) aparecen en la línea en el mismo orden.

Las medidas de ángulo en el modelo proyectivo son muy diferentes de los ángulos euclidianos y es difícil de entender mirando la imagen. (La idea descrita en la solución del Ejercicio 16.3.1 y en el boceto de prueba del Teorema 19.4.1 puede ser utilizada para construir muchas transformaciones proyectivas de este tipo.) Por ejemplo, todas las líneas h que se cruzan en la imagen son perpendiculares.
Hay dos excepciones útiles:
- Si\(O\) es el centro de lo absoluto, entonces\[\measuredangle_hAOB=\measuredangle AOB.\]
- Si\(O\) es el centro de lo absoluto y\(\measuredangle OAB=\pm\tfrac\pi2\), entonces
\(\measuredangle_h OAB=\measuredangle OAB=\pm \dfrac{\pi}{2}.\)
Para encontrar la medida del ángulo en el modelo proyectivo, se puede aplicar un movimiento del plano h que mueva el vértice del ángulo al centro de lo absoluto; una vez hecho esto los ángulos hiperbólico y euclidiano tienen la misma medida.
Los movimientos del plano h en los modelos conformales y proyectivos son relevantes para las transformaciones inversivas y la transformación proyectiva de la misma manera. A saber:
- Las transformaciones inversivas que preservan el plano h describen movimientos del plano h en el modelo conforme.
- Las transformaciones proyectivas que preservan el plano h describen movimientos del plano h en el modelo proyectivo. 1
El siguiente ejercicio es un análogo hiperbólico del Ejercicio 16.5.1. Este es el primer ejemplo de una afirmación que admite una prueba más fácil utilizando el modelo proyectivo.
Dejar\(P\) y\(Q\) ser los puntos en plano h que se encuentran a la misma distancia del centro de lo absoluto. Observe que en el modelo proyectivo, el punto medio h de\([PQ]_h\) coincide con el punto medio euclidiano de\([PQ]_h\).
Concluye que si un triángulo h está inscrito en un círculo h, entonces sus medianas se encuentran en un punto.
Recordemos que un triángulo h también podría estar inscrito en un horociclo o un equidistante. Piensa cómo probar la afirmación en este caso.
- Pista
-
La observación sigue ya que la reflexión a través de la bisectriz perpendicular de\([PQ]\) es un movimiento del plano euclidiano, y un movimiento del plano h también. Sin pérdida de generalidad, podemos suponer que el centro del circuncírculo coincide con el centro de lo absoluto. En este caso las h-medianas del triángulo coinciden con las medianas euclidianas. Queda por aplicar el Teorema 8.3.1.

Let\(\ell\) y\(m\) son h-lines en el modelo proyectivo. Dejar\(s\) y\(t\) denotar las líneas euclidianas tangentes a lo absoluto en los puntos ideales de\(\ell\). Mostrar que si las líneas\(s\),\(t\) y la extensión de se\(m\) cruzan en un punto, entonces\(\ell\) y\(m\) son perpendiculares h-líneas.

- Pista
-
Dejar\(\hat{\ell}\) y\(\hat{m}\) denotar las líneas h en el modelo conformal que corresponden a\(\ell\) y\(m\). Tenemos que mostrarlo\(\hat{\ell} \perp \hat{m}\) como arcos en el plano euclidiano.
El punto\(Z\), donde\(s\) se encuentra\(t\), es el centro del círculo\(\Gamma\) que contiene\(\hat{\ell}\).
Si\(\hat{m}\) es de paso\(Z\), entonces la inversión a\(\Gamma\) cambio de los puntos ideales de\(\hat{\ell}\). En particular,\(\hat{\ell}\) mapas a sí mismo. De ahí el resultado.
Utilice el modelo proyectivo para derivar la fórmula del ángulo de paralelismo (Proposición 13.1.1).
- Pista
-
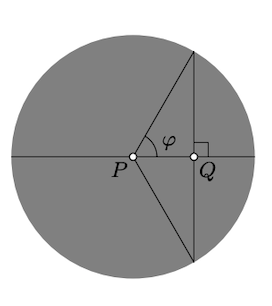
Dejar\(Q\) ser el punto del pie de\(P\) en la línea y\(\varphi\) ser el ángulo de paralelismo. Podemos suponer que\(P\) es el centro de lo absoluto. Por lo tanto\(PQ = \cos \varphi\) y
\(PQ_h = \dfrac{1}{2} \cdot \ln \dfrac{1 + \cos \varphi}{1 - \cos \varphi}.\)
Usa el modelo proyectivo para encontrar el radio in del triángulo ideal.
- Pista
-
Aplicar Ejercicio\(\PageIndex{3}\) para\(\varphi = \dfrac{\pi}{3}\).
El modelo proyectivo del plano h puede ser utilizado para dar otra prueba del teorema hiperbólico de Pitágoras (Teorema 13.6.1).
En primer lugar, recordemos su declaración:
\[\cosh c=\cosh a\cdot\cosh b,\]
donde\(a=BC_h\),\(b=CA_h\),\(c=AB_h\) y\(\triangle_hACB\) es un triángulo h con ángulo recto en\(C\).
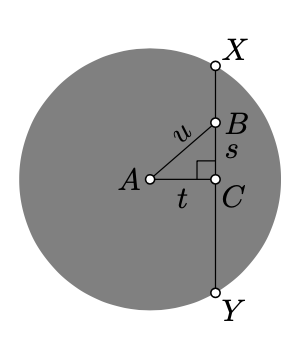
Tenga en cuenta que podemos suponer que\(A\) es el centro de lo absoluto. Establecer\(s=BC\),\(t =CA\),\(u= AB\). Según el teorema euclidiano de Pitágoras (Teorema 6.2.1), tenemos
\[u^2=s^2+t^2.\]
Queda por expresar\(a\),\(b\), y\(c\) usar\(s\)\(u\),\(t\) y demostrar que 17.2.3 implica 17.2.2.
Terminar la prueba del teorema hiperbólico de Pitágoras (Teorema 13.6.1) indicado anteriormente.
- Pista
-
Obsérvese que\(b = \dfrac{1}{2} \cdot \ln \dfrac{1 + t}{1 - t}\), por consiguiente
\[\cosh b = \dfrac{1}{2} \cdot (\sqrt{\dfrac{1 + t}{1 - t}} + \sqrt{\dfrac{1 - t}{1 +t}}) = \dfrac{1}{\sqrt{1 - t^2}}.\]
De la misma manera que lo conseguimos
\[\cosh c = \dfrac{1}{\sqrt{1 - u^2}}.\]
Dejar\(X\) y\(Y\) son los puntos ideales de\((BC)_h\). Aplicando de nuevo el teorema de Pitágoras (Teorema 6.2.1), lo conseguimos\(CX = CY = \sqrt{1 - t^2}\). Por lo tanto,
\(a = \dfrac{1}{2} \cdot \ln \dfrac{\sqrt{1 - t^2} + s}{\sqrt{1 - t^2} - s},\)
y
\[\cosh a = \dfrac{1}{2} \cdot (\dfrac{\sqrt{1 - t^2} + s}{\sqrt{1 - t^2} - s} + \dfrac{\sqrt{1 - t^2} - s}{\sqrt{1 - t^2} + s}) = \dfrac{\sqrt{1 - t^2}}{\sqrt{1 - t^2 - s^2}} = \dfrac{\sqrt{1 - t^2}}{\sqrt{1 - u^2}}.\]
Por último, señalar que 17.2.5, 17.2.6 y 17.2.7 implican el teorema.