
7.4: Tacto
- Page ID
- 148162
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Tocar
Objetivos de aprendizaje
1. Describir el papel del toque social y afectivo en el desarrollo y la vinculación.
2. Describir cómo el sistema somatosensorial permite la detección del tacto, la temperatura y la posición en el espacio.
3. Describir el proceso de transducción en los sentidos del tacto y propiocepción.
4. Explicar cómo las expectativas y el contexto afectan las experiencias de dolor y tacto.
El sentido del tacto es uno de los sentidos más importantes en el desarrollo humano, particularmente en lo que respecta al apego a los demás. Durante mucho tiempo se ha visto como una parte esencial del desarrollo infantil (Baysinger, Plubell, & Harlow, 1973; Feldman, 2007; Haradon, Bascom, Dragomir, & Scripcaru, 1994) y también nos ayuda a sentirnos socialmente apegados a los demás (Field et al., 1997; Kelter, 2009). El tacto es una parte esencial de las actividades cotidianas que van desde tocar nuestra comida para comer hasta compartir el afecto humano con otro individuo. Estudios recientes indican que el tacto cariñoso lento, en lugar de un toque neutro más rápido, puede servir como amortiguador contra el dolor físico. Además, el mismo toque cariñoso lento puede reducir los sentimientos de exclusión social y aumentar la vinculación social.
La piel es el órgano más grande de nuestro cuerpo y tiene una variedad de terminaciones nerviosas que nos permiten sentir sensaciones como presión, dolor, frío y calor. La piel de nuestros cuerpos también sirve como protector de importantes órganos vitales.
El tacto y el dolor son aspectos del sistema somatosensorial, que proporciona a nuestro cerebro información sobre nuestro propio cuerpo (interocepción) y propiedades del mundo externo inmediato (exterocepción) (Craig, 2002). Contamos con receptores somatosensoriales ubicados en todo el cuerpo, desde la superficie de nuestra piel hasta la profundidad de nuestras articulaciones. La información que envían al sistema nervioso central se divide generalmente en cuatro modalidades: sentidos cutáneos (sentidos de la piel), propiocepción (posición corporal), cinestesia (movimiento corporal) y nocicepción (dolor, malestar).
Sentidos cutáneos (sentidos de la piel)
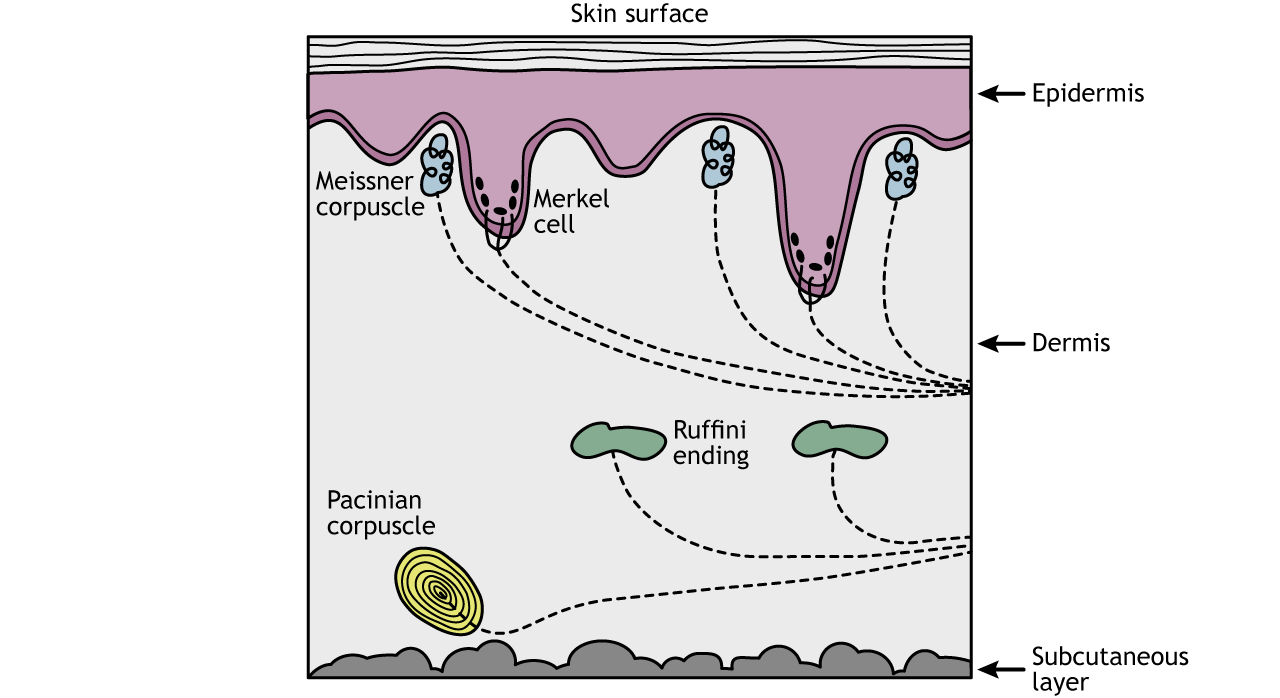
Los sentidos cutáneos responden a estímulos táctiles, térmicos y pruriginosos (picazón), y eventos que causan daño tisular (de ahí dolor). Los mecanorreceptores cutáneos se localizan en la piel. Proporcionan los sentidos del tacto, presión, vibración, propiocepción, y otros. Todas están inervadas por fibras Aβ (las fibras Aβ de la piel se dedican principalmente al tacto), excepto las terminaciones nerviosas libres mecanoreceptoras, las cuales están inervadas por fibras Aδ (las fibras Aδ sirven para recibir y transmitir información principalmente relacionada con el dolor agudo; agudo, inmediato y relativamente corta duración).
Los pueden clasificarse por morfología, por el tipo de sensación que perciben y por la velocidad de adaptación. Además, cada uno tiene un campo receptivo diferente:
- Los órganos terminales de Ruffini detectan tensión profunda en la piel.
- Los corpúsculos de Meissner detectan cambios en la textura (vibraciones alrededor de 50 Hz) y se adaptan rápidamente.
- Los corpúsculos pacinianos detectan vibraciones rápidas (alrededor de 200—300 Hz).
- Los discos de Merkel detectan el tacto y la presión sostenidos.
- Las terminaciones nerviosas libres mecanoreceptoras detectan el tacto, la presión y el estiramiento.
- Los receptores del folículo piloso se localizan en los folículos pilosos y detectan los cambios de posición de las hebras capilares.
Final de Ruffini
La terminación de Ruffini (corpúsculo de Ruffini o corpúsculo bulboso) es una clase de mecanorreceptores de adaptación lenta que se cree que existen solo en la dermis glabra y el tejido subcutáneo de los humanos. Lleva el nombre de Angelo Ruffini (un histólogo y embriólogo italiano).
Este receptor en forma de huso es sensible al estiramiento de la piel y contribuye a la sensación cinestésica y al control de la posición y el movimiento de los dedos. Se cree que es útil para monitorear el deslizamiento de objetos a lo largo de la superficie de la piel, permitiendo la modulación del agarre sobre un objeto.
Las terminaciones de Ruffini se encuentran en las capas profundas de la piel. Registran información mecánica dentro de las juntas, más específicamente cambio de ángulo, con una especificidad de hasta dos grados, así como estados de presión continua. También actúan como termorreceptores que responden durante mucho tiempo, como tomarse de la mano con alguien durante una caminata. En caso de una quemadura profunda en el cuerpo, no habrá dolor ya que estos receptores se quemarán.
Corpúsculos de Meissner
Los corpúsculos de Meissner (o corpúsculos táctiles) son responsables de la sensibilidad al tacto ligero. En particular, tienen la mayor sensibilidad (umbral más bajo) al detectar vibraciones inferiores a 50 hercios. Son receptores rápidamente adaptativos.
Corpúsculos Pacinianos
Los corpúsculos pacinianos (o corpúsculos lamelares) son responsables de la sensibilidad a la vibración y la presión. El papel vibracional se puede usar para detectar la textura superficial, por ejemplo, rugosa versus lisa.
Nervio Merkel
Las terminaciones nerviosas de Merkel son mecanorreceptores que se encuentran en la piel y mucosa de los vertebrados que proporcionan información táctil al cerebro. La información que proporcionan es la relativa a la presión y textura. Cada terminación consiste en una célula de Merkel en estrecha aposición con un terminal nervioso agrandado.
Esto a veces se conoce como un complejo de células de Merkel y neuritas, o un receptor de disco de Merkel. Una sola fibra nerviosa aferente se ramifica para inervar hasta 90 terminaciones de este tipo. Se clasifican como mecanorreceptores tipo I de adaptación lenta.
Propriocepción (posición del cuerpo)
La propiocepción se refiere al sentido de saber cómo se posiciona el cuerpo en el espacio tridimensional. La propiocepción es el sentido de la posición relativa de las partes vecinas del cuerpo y la fuerza de esfuerzo que se emplea en el movimiento. Se distingue de la exterocepción (percepción del mundo exterior) e interocepción (percepción del dolor, hambre y movimiento de órganos internos). El inicio de la propiocepción es la activación de un propiorreceptor en la periferia. Se cree que el sentido propioceptivo está compuesto por información de neuronas sensoriales localizadas en el oído interno (movimiento y orientación) y en los receptores de estiramiento ubicados en los músculos y los ligamentos de soporte articular (postura). La propiocepción consciente es comunicada por la vía posterior (dorsal) columna-lemniscus medial al cerebro. La propiocepción inconsciente se comunica principalmente a través del tracto espinocerebeloso dorsal y ventral al cerebelo.
Una reacción inconsciente se ve en el reflejo propioceptivo humano, o Ley de Enderezamiento, reflejo que corrige la orientación del cuerpo cuando es sacado de su posición vertical normal. En el caso de que el cuerpo se incline en cualquier dirección, la persona inclinará la cabeza hacia atrás para nivelar los ojos contra el horizonte. A menudo se ve a los bebés haciendo esto tan pronto como obtienen el control de los músculos del cuello. Este control proviene del cerebelo, la parte del cerebro que afecta el equilibrio.
Los husillos musculares son receptores sensoriales dentro del vientre de un músculo que detectan principalmente cambios en la longitud de un músculo. Transmiten información de longitud al sistema nervioso central a través de neuronas sensoriales. Esta información puede ser procesada por el cerebro para determinar la posición de las partes del cuerpo. Las respuestas de los husillos musculares a los cambios en la longitud también juegan un papel importante en la regulación de la contracción de los músculos.
El órgano de Golgi (también llamado órgano tendinoso de Golgi, órgano tendinoso, órgano neurotendinoso o huso neurotendinoso) es un receptor sensorial propioceptivo que proporciona el componente sensorial del reflejo del tendón de Golgi. El órgano de Golgi no debe confundirse con el aparato de Golgi, un orgánulo en la célula eucariota, ni con la tinción de Golgi, que es una tinción histológica para cuerpos celulares neuronales. El reflejo del tendón de Golgi es un componente normal del arco reflejo del sistema nervioso periférico. En un reflejo tendinoso de Golgi, la contracción del músculo esquelético hace que el músculo agonista se alargue y relaje simultáneamente. Este reflejo también se llama el reflejo miotático inverso, porque es el inverso del reflejo de estiramiento. Aunque la tensión muscular aumenta durante la contracción, se inhiben las neuronas motoras alfa en la médula espinal que abastecen al músculo y se activan los músculos antagónicos.
Cinestesia (movimiento corporal)
Kinestesia o Kinestesia es un término que a menudo se usa indistintamente con propiocepción. Algunos usuarios diferencian el sentido cinestésico de la propiocepción al excluir el sentido de equilibrio o equilibrio de la cinestesia. Una infección del oído interno, por ejemplo, podría degradar el sentido del equilibrio. Esto degradaría el sentido propioceptivo, pero no el sentido cinestésico. La persona infectada podría caminar, pero sólo usando su sentido de la vista para mantener el equilibrio; la persona puede tener dificultad para caminar cuando sus ojos están cerrados.
La propiocepción y la cinestesia se consideran interrelacionadas y existe un desacuerdo considerable respecto a la definición de estos términos. Parte de esta dificultad proviene de la descripción original de Sherrington del sentido de la posición articular (o la capacidad de determinar dónde se encuentra exactamente una parte del cuerpo en particular en el espacio) y la cinestesia (o la sensación de que la parte del cuerpo se ha movido) bajo un título más general de propiocepción. Los aspectos clínicos de la propiocepción se miden en pruebas que miden la capacidad de un sujeto para detectar un movimiento pasivo impuesto externamente, o la capacidad de reposicionar una articulación a una posición predeterminada. A menudo se asume que la capacidad de uno de estos aspectos estará relacionada con otro, desafortunadamente la evidencia experimental sugiere que no existe una relación fuerte entre estos dos aspectos. Esto sugiere que si bien estos componentes pueden estar relacionados de manera cognitiva, parecen estar separados fisiológicamente.
Gran parte del trabajo anterior depende de la noción de que la propiocepción es esencialmente un mecanismo de retroalimentación: es decir, el cuerpo se mueve (o se mueve) y luego la información sobre esto se devuelve al cerebro con lo que se podrían hacer ajustes posteriores. Los trabajos más recientes sobre el mecanismo de los esguinces de tobillo sugieren que el papel de los reflejos puede ser más limitado debido a sus largas latencias (incluso a nivel de la médula espinal) ya que los eventos de esguince de tobillo ocurren en quizás 100 milisegundos o menos. Como resultado, se ha propuesto un modelo para incluir un componente 'feedforward' de propiocepción donde el sujeto también tendrá información central sobre la posición del cuerpo antes de alcanzarlo.
La cinestesia es un componente clave en la memoria muscular y la coordinación mano-ojo y el entrenamiento puede mejorar este sentido. La capacidad de balancear un palo de golf, o de atrapar una pelota, requiere un sentido afinado de la posición de las articulaciones. Este sentido necesita volverse automático a través del entrenamiento para permitir que una persona se concentre en otros aspectos del desempeño, como mantener la motivación o ver dónde están otras personas.
Nocicepción (dolor, malestar)
La nocicepción aborda una serie de eventos y procesos requeridos para que un organismo reciba un estímulo doloroso, lo convierta en una señal molecular y reconozca y caracterice la señal para desencadenar una respuesta de defensa adecuada. Esto sirve como una función importante porque nuestro cerebro a menudo puede apagar o reducir los sentimientos de dolor dependiendo de la situación que podamos estar viviendo o en la que estemos involucrados. Un ejemplo involucra a atletas que a menudo no sienten dolor hasta después de haber completado el juego o evento en el que están participando (Bantick, Wise, Ploghaus, Clare, Smith, & Tracey, 2002). En esencia su cerebro está involucrado en un proceso complicado que requiere que utilicen múltiples sistemas para mantenerse enfocados en la actividad. Las endorfinas que se liberan cuando estamos comprometidos o emocionados por una situación o evento que nos rodea actúan como analgésicos naturales (Sternberg, Bailin, Grant, & Gracely, 1998).
La corteza somatosensorial primaria
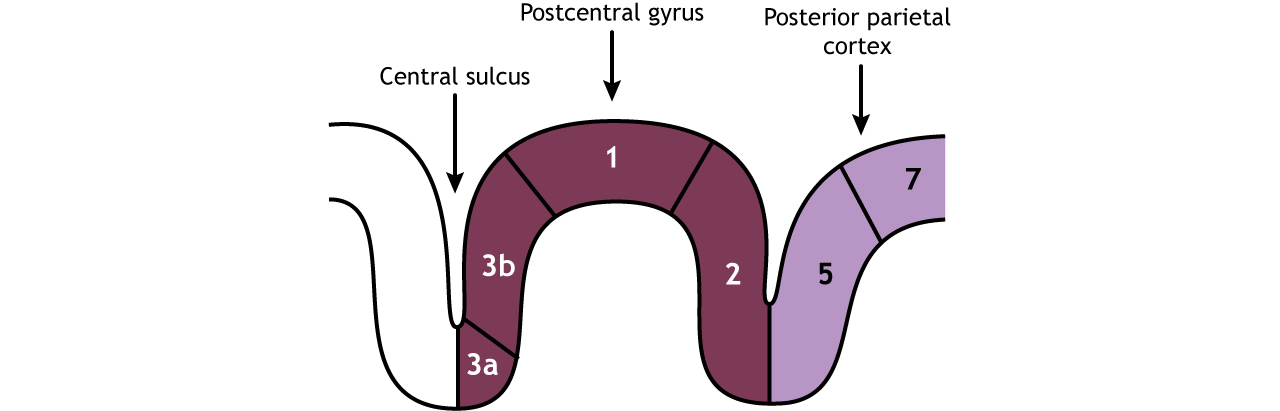
La corteza somatosensorial primaria se divide en cuatro regiones, cada una con su propia entrada y función: las áreas 1, 2, 3a y 3b. La mayoría de la información táctil de los mecanorreceptores ingresa a la región 3b, mientras que la mayoría de la información propioceptiva de los músculos ingresa a la región 3a. Estas regiones luego envían y reciben información de las áreas 1 y 2. A medida que continúa el procesamiento de la información somatosensorial, los estímulos requeridos para activar las neuronas se vuelven más complejos. Por ejemplo, el área 1 está involucrada en la detección de textura, y el área 2 está involucrada en la detección del tamaño y la forma de un objeto. La corteza parietal posterior, una región de salida importante de la corteza somatosensorial, se encuentra caudal a la circunvolución postcentral; las áreas 5 y 7 son estructuras aguas abajo que continúan procesando el tacto (ver Figura\(\PageIndex{2}\)).
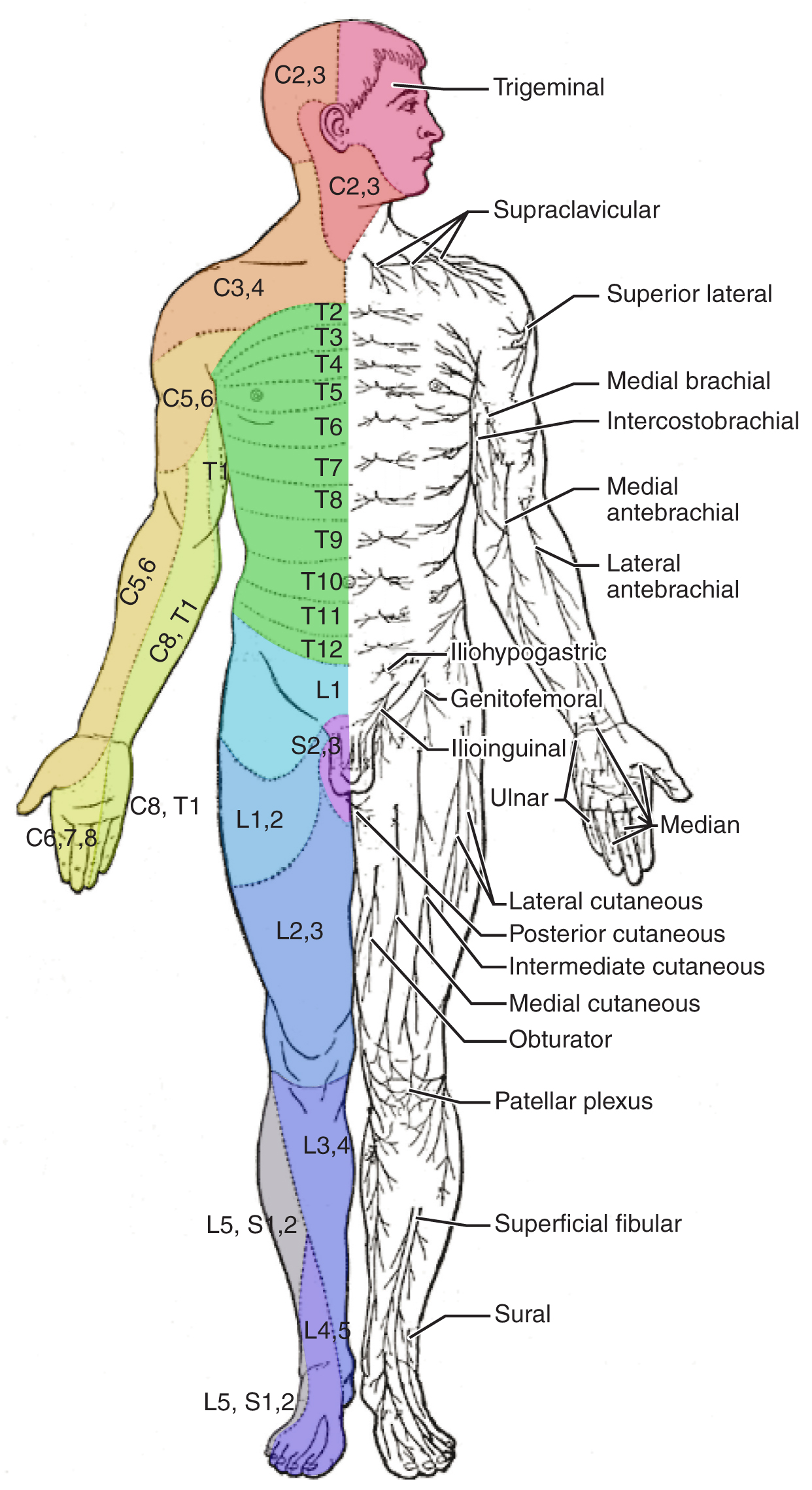
La prueba de los sentidos comienza con el examen de las regiones conocidas como dermatomas que conectan con la región cortical donde se percibe la somatosensación en la circunvolución postcentral. Para probar los campos sensoriales, se aplica un estímulo simple del toque ligero del extremo suave de un aplicador con punta de algodón en varias ubicaciones de la piel. Los nervios espinales, que contienen fibras sensoriales con terminaciones dendríticas en la piel, se conectan con la piel de una manera topográficamente organizada, ilustrados como dermatomas (Figura\(\PageIndex{3}\) - no es necesario memorizar los términos en esta figura). Por ejemplo, las fibras del octavo nervio cervical inervan la superficie medial del antebrazo y se extienden hacia los dedos. Además de probar la percepción en diferentes posiciones de la piel, es necesario probar la percepción sensorial dentro del dermatoma desde localizaciones distales a proximales en los apéndices, o localizaciones laterales a mediales en el tronco. Al probar el octavo nervio cervical, se le preguntaría al paciente si el tacto del algodón en los dedos o el antebrazo medial era perceptible, y si hubo alguna diferencia en las sensaciones.
Atribuciones
- Secciones táctiles adaptadas por Isaías Hernández de “Noba-Psicología Biológica, Tacto y Dolor”; https://nobaproject.com/modules/touch-and-pain#:~:text=Touch%20and%20pain%20are%20aspects,)%20(Craig%2C%202002).
- Secciones táctiles adaptadas por Isaías Hernández de “Introducción a la Psicología, Universidad de Minnesota"'; https://open.lib.umn.edu/intropsyc/chapter/4-4-tasting-smelling-and-touching/
- Secciones táctiles adaptadas por Isaías Hernández de “Boundless Anatomy and Physiology from Lumen”; https://courses.lumenlearning.com/boundless-ap/chapter/pain/
- Secciones táctiles adaptadas por Isaías Hernández de “Kinesthia, Psychology Wiki”; https://en.Wikipedia.org/wiki/Kinaesthetics
- Secciones táctiles adaptadas por Isaías Hernández de “Nocicepción, Wikipedia”; https://en.Wikipedia.org/wiki/Nociception
- Secciones táctiles adaptadas por Isaías Hernández de “Fundamentos de la Neurociencia, Michigan State University”; https://openbooks.lib.msu.edu/neuroscience/chapter/touch-the-skin/
- Secciones táctiles adaptadas por Isaías Hernández de “Anatomía y Fisiología, Universidad Estatal de Oregón”; https://open.oregonstate.education/aandp/chapter/14-5-sensory-and-motor-pathways/
Referencias
- von Mohr, M., Kirsch, L.P. & Fotopoulou, A. La función calmante del tacto: el tacto afectivo reduce los sentimientos de exclusión social. Sci Rep 7, 13516 (2017). https://doi.org/10.1038/s41598-017-13355-7