3.5: Cantidades intrínsecas
- Page ID
- 127159

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Los modelos pueden ser peligrosos, porque pueden tentarnos a imputar la realidad física a rasgos que son puramente extrínsecos, es decir, que sólo están presentes en ese modelo en particular. Esto se opone a las características intrínsecas, que están presentes en todos los modelos, y que por lo tanto están implícitas lógicamente por los axiomas del propio sistema. La existencia del lunes es claramente una característica intrínseca de las geometrías no euclidianas, ya que la intersección de líneas se definió antes de que se hubiera propuesto algún modelo.
Ejemplo 4: Curvatura en geometría elíptica
¿Qué pasa con la curvatura? En el modelo esférico de geometría elíptica, el tamaño de la esfera es una medida inversa de curvatura. ¿Es esta una cantidad intrínseca válida, o es extrínseca? Parece sospechoso, porque es una característica del modelo. Si tratamos de definir “tamaño” como el radio R de la esfera, claramente hay motivo de preocupación, porque esto parece referirse al centro de la esfera, pero la existencia de un espacio euclidiano tridimensional dentro y fuera de la superficie es claramente una característica extrínseca del modelo. Sin embargo, existe una manera en la que una criatura confinada a la superficie puede determinar R, construyendo un parámetro geodésico y un parámetro afín a lo largo de esa geodésica, y midiendo la distancia\(\lambda\) acumulada hasta que la geodésica regrese al punto inicial. Dado que se identifican los puntos antípodas,\(\lambda\) equivale a la mitad de la circunferencia de la esfera, no a toda su circunferencia, así que R =\(\frac{\lambda}{\pi}\), por métodos totalmente intrínsecos.
Ejemplo 5: Curvatura extrínseca
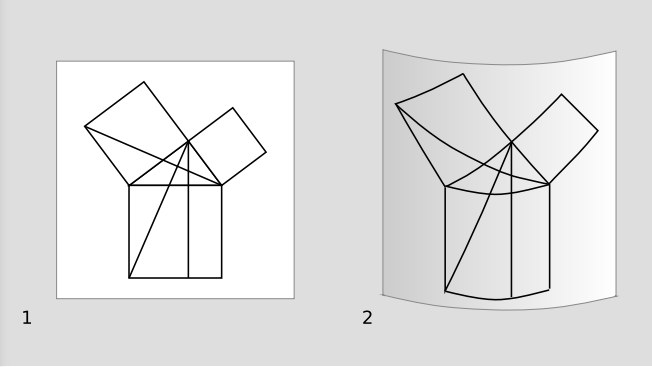
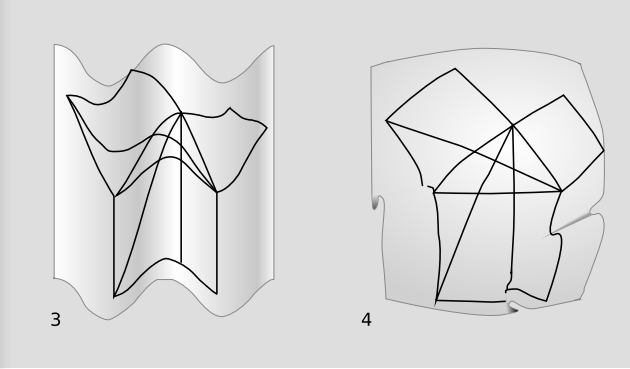
Los axiomas de Euclides E1-E5 se refieren a construcciones explícitas. Si un ser bidimensional puede verificarlos físicamente a todos como descripciones del espacio bidimensional que habita, entonces sabe que su espacio es euclidiana, y que proposiciones como el teorema de Pitágoras son físicamente válidas en su universo. Pero el diagrama en a/1 que ilustra la prueba del teorema de Pitágoras en Elementos de Euclides (proposición I.47) es igualmente válido si la página está enrollada sobre un cilindro, 2, o conformada en una forma ondulada ondulada, 3. Estos tipos de curvatura, que se pueden lograr sin rasgar o arrugar la superficie, son extrínsecos más que intrínsecos. De las superficies curvas de la Figura 3.4.1, solo la esfera, 4, tiene curvatura intrínseca; el diagrama no se puede enlustrar sobre la esfera sin plegar o cortar y pegar.
Ejercicio\(\PageIndex{1}\)
Autocomprobación: ¿Cómo se aplicarían las ideas del ejemplo 5 a un cono?
El ejemplo 5 muestra que puede ser difícil olfatear características extrínsecas falsas que parecen intrínsecas, y el ejemplo 4 sugiere la conveniencia de desarrollar métodos de cálculo que nunca se refieran a ninguna cantidad extrínseca, para que nunca tengamos que preocuparnos si un símbolo como R mirándonos desde una pieza de el papel es intrínseco. Es por ello que es poco probable que sea útil para un estudiante de relatividad general recoger un libro sobre geometría diferencial que fue escrito sin la relatividad general específicamente en mente. Tales libros tienen una tendencia a mezclar casualmente la notación intrínseca y extrínseca. Por ejemplo, un producto cruzado vectorial a × b se refiere a un vector que sale del plano ocupado por a y b, y el espacio fuera del plano puede ser extrínseco; no es obvio cómo generalizar esta operación a las dimensiones 3+1 de la relatividad (ya que cross product es una bestia tridimensional), e incluso si lo fuera, no podríamos estar seguros de que tendría algún significado intrínsecamente bien definido.
Coordinar Independencia
Para ver cómo proceder en la creación de una notación manifiestamente intrínseca, considere los dos tipos de observaciones intrínsecas que están disponibles en la relatividad general:
- 1. Podemos decir si los eventos y las líneas mundiales son incidentes: si dos líneas se cruzan o no, dos eventos coinciden, o un evento se encuentra en una línea determinada.
Las mediciones de incidencia, por ejemplo la detección de lentes gravitacionales, son globales, pero son las únicas observaciones globales que podemos hacer. 4 Si estuviéramos limitados por completo a la incidencia, el espacio-tiempo sería descrito por el austero sistema de geometría proyectiva, una geometría sin paralelos ni medición. En geometría proyectiva, todas las proposiciones son esencialmente declaraciones sobre combinatoria, por ejemplo, que es imposible plantar siete árboles para que formen siete líneas de tres árboles cada una.
Nota
Einstein se refirió a las mediciones de incidencia como “determinaciones de coincidencias espacio-tiempo”. Para su presentación de esta idea, véase el Apéndice A.
Pero:
- 2. También podemos hacer mediciones en marcos locales de Lorentz.
Esto nos da más poder, pero no tanto como cabría esperar. Supongamos que definimos una coordenada como t o x. En la mecánica newtoniana, estas coordenadas formarían un fondo predefinido, una etapa preexistente para los actores. En la relatividad, por otro lado, consideramos un cambio completamente arbitrario de coordenadas de la forma x → x' = f (x), donde f es una función suave uno-a-uno. Por ejemplo, podríamos tener x → x + px 3 + q sin (rx) (con p y q elegidos lo suficientemente pequeños para que el mapeo sea siempre uno a uno). Dado que el mapeo es uno a uno, el nuevo sistema de coordenadas preserva todas las relaciones de incidencia. Dado que el mapeo es suave, el nuevo sistema de coordenadas sigue siendo compatible con la existencia de marcos locales de Lorentz. Por lo tanto, la diferencia entre los dos sistemas de coordenadas es completamente extrínseca, y concluimos que una notación manifiestamente intrínseca debería evitar cualquier referencia explícita a un sistema de coordenadas. Es decir, si escribimos un cálculo en el que aparece un símbolo como x, necesitamos asegurarnos de que en ninguna parte de la notación hay alguna suposición oculta de que x proviene de algún sistema de coordenadas en particular. Por ejemplo, la ecuación debería seguir siendo válida si posteriormente se toma el símbolo genérico x para representar la distancia r desde algún centro de simetría. Esta propiedad de independencia de coordenadas también se conoce como covarianza general, y este tipo de cambio suave de coordenadas también se llama diffeomorfismo.
Ejemplo 6:
Como ejemplo exótico de un cambio de coordenadas, tomar un toro y etiquetarlo con coordenadas\(( \theta, \varphi)\), donde\(\theta + 2 \pi\) se toma como lo mismo que\(\theta\), y de manera similar para\(\varphi\). Ahora sujetarlo a la transformación de coordenadas T definida por\(\theta \rightarrow \theta + \varphi\), que es como abrir el toro, retorcerlo por un círculo completo, y luego unir los extremos nuevamente juntos. T se conoce como el “giro Dehn”, y es diferente de la mayoría de las transformaciones de coordenadas que hacemos en la relatividad porque no se puede hacer sin problemas, es decir, no hay una función continua f (x) en 0 ≤ x ≤ 1 tal que cada valor de f es una transformación de coordenadas suave, f (0) es la transformación de identidad, y f (1) = T.
Marcos Se mueven a c?
Una buena aplicación de estas ideas es a la cuestión de cómo sería el mundo en un marco de referencia moviéndose a la velocidad de la luz. Esta pregunta tiene una larga y honorable historia. Cuando era joven estudiante, Einstein intentó imaginar cómo sería una onda electromagnética desde el punto de vista de un motociclista que viajaba a su lado. Ahora sabemos, gracias al propio Einstein, que realmente no tiene sentido hablar de tales observadores.
El argumento más directo se basa en la idea positivista de que los conceptos solo significan algo si se puede definir cómo medirlos operacionalmente. Si aceptamos esta postura filosófica (que de ninguna manera es compatible con todos los conceptos que discutimos en física), entonces necesitamos ser capaces de realizar físicamente este marco en términos de observador y dispositivos de medición. Pero no podemos Se necesitaría una cantidad infinita de energía para acelerar a Einstein y su motocicleta a la velocidad de la luz.
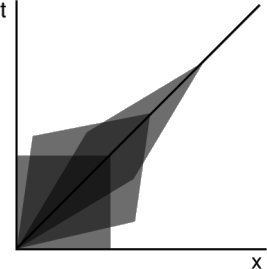
Dado que los argumentos del positivismo a menudo pueden acabar con conceptos perfectamente interesantes y razonables, podríamos preguntarnos si hay otras razones para no permitir tales marcos. Hay. Recordemos que colocamos dos condiciones técnicas en las transformaciones de coordenadas: se supone que son suaves y uno-a-uno. La condición de suavidad está relacionada con la incapacidad de impulsar la motocicleta de Einstein en el marco de la velocidad de la luz por cualquier proceso continuo y clásico. (La relatividad es una teoría clásica.) Pero independientemente de eso, tenemos un problema con el requisito uno a uno. La Figura 3.4.2 muestra lo que sucede si hacemos una serie de potenciadores de Lorentz a velocidades cada vez mayores. Debe quedar claro que si pudiéramos hacer un impulso hasta una velocidad de c, habríamos efectuado una transformación de coordenadas que no era uno a uno. Cada punto del plano se mapearía en una sola línea parecida a la luz.