
5.5: Tensores de curvatura
- Page ID
- 127316

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)El ejemplo de la pulga sugiere que si queremos expresar la curvatura como un tensor, debe tener rango par. También, en un sistema de coordenadas en el que las coordenadas tienen unidades de distancia (no son ángulos, por ejemplo, como en coordenadas esféricas), esperamos que las unidades de curvatura siempre sean de distancia inversa al cuadrado. Otra forma de poner esto es que si empezamos con coordenadas normales y luego reescalamos todas las coordenadas por un factor de µ, un tensor de curvatura debería reducir la escala por\(\mu^{−2}\). (Véase la sección 5.11, para más información sobre este tema.)
Combinando estos dos hechos, encontramos que un tensor de curvatura debe tener una de las formas R ab R a bcd,.., es decir, el número de índices inferiores debe ser dos mayor que el número de índices superiores. La siguiente definición tiene esta propiedad, y es equivalente a las definiciones anteriores de la curvatura gaussiana que no fueron escritas en notación tensora.
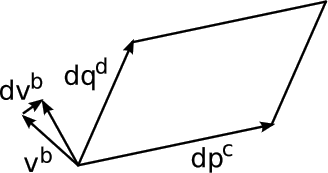
Definición del tensor de curvatura de Riemann: Que dp c y dq d sean dos vectores infinitesimales, y utilícelos para formar un cuadrilátero que sea una buena aproximación a un paralelogramo. 6 Vector de transporte paralelo v b alrededor del paralelogramo. Cuando vuelve a su punto de partida, tiene un nuevo valor v b → v b + dv b. Entonces el tensor de curvatura de Riemann se define como el tensor que calcula dv a de acuerdo con dv a = R a bcd v b dp c dq d. (No hay estandarización en la literatura del orden de los índices.)
Nota
En la sección 5.8 se discute el sentido en que esta aproximación es suficientemente buena.
Ejemplo 7: Una simetría del tensor Riemann
Si los vectores dp c y dq d se encuentran a lo largo de la misma línea, entonces dv a debe desvanecerse,\(dp^c\) e intercambiando y\(dq^d\) simplemente invierte la dirección del circuito alrededor del cuadrilátero, dando dv a → − dv a. Esto demuestra que R a bcd debe ser antisimétrico bajo intercambio de los índices\(c\) y\(d\),
\[R^a_{bcd} = −R^a_{bdc}.\]
En las coordenadas normales locales, la interpretación del tensor Riemann se vuelve particularmente transparente. Las líneas de coordenada constante son geodésicas, por lo que cuando el vector v b se transporta a lo largo de ellas, mantiene un ángulo constante con respecto a ellas. Cualquier rotación del vector después de que se lleve alrededor del perímetro del cuadrilátero puede, por lo tanto, atribuirse a algo que sucede en los vértices. En otras palabras, es simplemente una medida del defecto angular. Por lo tanto, podemos ver que el tensor Riemann es realmente solo una forma tensorial de escribir la curvatura gaussiana
\[K = \frac{d \epsilon}{dA}.\]
En coordenadas normales, la geometría local es casi cartesiana, y cuando tomamos el producto de dos vectores de manera antisimétrica, estamos midiendo esencialmente el área del paralelogramo que abarcan, como en el producto cruzado vectorial tridimensional. Por lo tanto, podemos ver que el tensor Riemann nos dice algo sobre la cantidad de curvatura contenida dentro del área infinitesimal abarcada por dp c y dq d. Una región bidimensional finita puede dividirse en elementos infinitesimales de área, y el tensor Riemann integrado sobre ellos. El resultado es igual al cambio finito\(\Delta\) v b en un vector transportado alrededor de todo el límite de la región.
Ejemplo 8: Tensores de curvatura en una esfera
Encontremos los tensores de curvatura en una esfera de radio\(\rho\).
Construir coordenadas normales (x, y) con origen O, y dejar que los vectores dp c y dq d representen desplazamientos infinitesimales a lo largo de x e y, formando un cuadrilátero como se describió anteriormente. Entonces R x yxy representa el cambio en la dirección x que ocurre en un vector que está inicialmente en la dirección y. Si el vector tiene magnitud unitaria, entonces R x yxy es igual al déficit angular del cuadrilátero. Comparando con la definición de la curvatura gaussiana, encontramos R x yxy = K =\(\frac{1}{\rho^{2}}\). Intercambiando x e y, encontramos el mismo resultado para R y xyx. Así, aunque el tensor Riemann en dos dimensiones tiene dieciséis componentes, sólo estos dos son distintos de cero, y son iguales entre sí.
Este resultado representa el defecto en transporte paralelo alrededor de un bucle cerrado por unidad de área. Supongamos que transportamos en paralelo un vector alrededor de un octante, como se muestra en la Figura 5.4.2. El área del octante es\((\frac{\pi}{2}) \rho^{2}\), y multiplicándolo por el tensor Riemann, encontramos que el defecto en el transporte paralelo es\(\frac{\pi}{2}\), es decir, un ángulo recto, como también se desprende de la figura.
El tratamiento anterior puede ser algo engañoso ya que puede llevarte a creer que existe un solo sistema de coordenadas en el que el tensor Riemann es siempre constante. Este no es el caso, ya que el cálculo del tensor Riemann sólo fue válido cerca del origen O de las coordenadas normales. El carácter de estas coordenadas se vuelve bastante complicado lejos de O; terminamos con todas nuestras líneas de x constantes convergiendo en los polos norte y sur de la esfera, y todas las líneas de y constantes en los polos este y oeste.
\((\phi, \theta)\)Las coordenadas angulares son más adecuadas como una descripción a gran escala de la esfera. Podemos usar la ley de transformación de tensores para encontrar el tensor Riemann en estas coordenadas. Si O, el origen de las coordenadas (x, y), está en las coordenadas\((\phi, \theta)\), entonces\(\frac{dx}{d \phi} = \rho \sin \theta\) y\(\frac{dy}{d \theta} = \rho\). El resultado es\(R^{\phi}_{\theta \phi \theta} = R^{x}_{yxy} (\frac{dy}{d \theta})^{2} = 1\) y\(R^{\theta}_{\phi \theta \phi} = R^{y}_{xyx} (\frac{dx}{d \phi})^{2} = \sin^{2} \theta\). La variación en no\(R^{\theta}_{\phi \theta \phi}\) se debe a ninguna variación en la curvatura intrínseca de la esfera; representa el comportamiento del sistema de coordenadas.
El tensor Riemann solo mide la curvatura dentro de un plano particular, el definido por dp c y dq d, por lo que es una especie de curvatura seccional. Como actualmente estamos trabajando en dos dimensiones, sin embargo, solo hay un plano, y no hay distinción real entre curvatura seccional y curvatura Ricci, que es el promedio de la curvatura seccional sobre todos los planos que incluyen dq d: R cd = R a cad. La curvatura de Ricci en dos dimensiones espaciales, expresada en coordenadas normales, es simplemente la matriz diagonal diag (K, K).