
5.4:5.4 Visualización del espacio de fase basada en gráficos del modelo de tiempo discreto de estado discreto
- Page ID
- 115776
El enfoque de la trama telaraña discutido anteriormente funciona solo para sistemas unidimensionales, ya que no podemos incrustar tales parcelas para ningún sistema de dimensiones superiores en un espacio físico tridimensional. Sin embargo, esta restricción dimensional desaparece si los estados del sistema son discretos y finitos. Para un sistema de este tipo, siempre puede enumerar todas las transiciones de estado posibles y crear todo el espacio de fase del sistema como un gráfico de transición de estado, que se puede visualizar razonablemente bien incluso dentro de un espacio de visualización 2-D.
Aquí hay un ejemplo. Consideremos la siguiente ecuación de diferencia de segundo orden (es decir, bidimensional):
\[x_{t} =x_{t-1}x_{t-2} \mod{6} \label{(5.18)} \]
El “mod 6” al final de la ecuación significa que su lado derecho es siempre un resto de la división de\(x_{t−1}x_{t−2}\) por 6. Esto significa que el posible estado de\(x\) está limitado solo a 0, 1, 2, 3, 4 o 5, es decir, el estado del sistema\((x,y)\) (donde\(y\) está el anterior
valor de\(x\)) está confinado dentro de un conjunto finito de\(6×6 = 36\) posibles combinaciones que van de (0, 0) a (5, 5). Es muy fácil enumerar todos los 36 estados y estudiar numéricamente a qué estado pasará cada uno de ellos. El resultado de este análisis se ve así:
•\((0,0) → (0,0)\)
•\((1,0) → (0,1)\)
•\((2,0) → (0,2)\)
•...
•\((3,2) → (0,3)\)
•\((4,2) → (2,4)\)
•\((5,2) → (4,5)\)
•...
•\((3,5) → (3,3)\)
•\((4,5) → (2,4)\)
•\((5,5) → (1,5)\)
Al enumerar todas las transiciones de estado, obtenemos una lista de conexiones entre los estados discretos, que forma una red, o una gráfica en terminología matemática. Aprenderemos más sobre el modelado y análisis de redes más adelante en este libro de texto, pero te puedo dar un pequeño adelanto aquí. Podemos usar un módulo Python llamado NetworkX [27] para construir y visualizar la red 1. Ver Código 5.5.
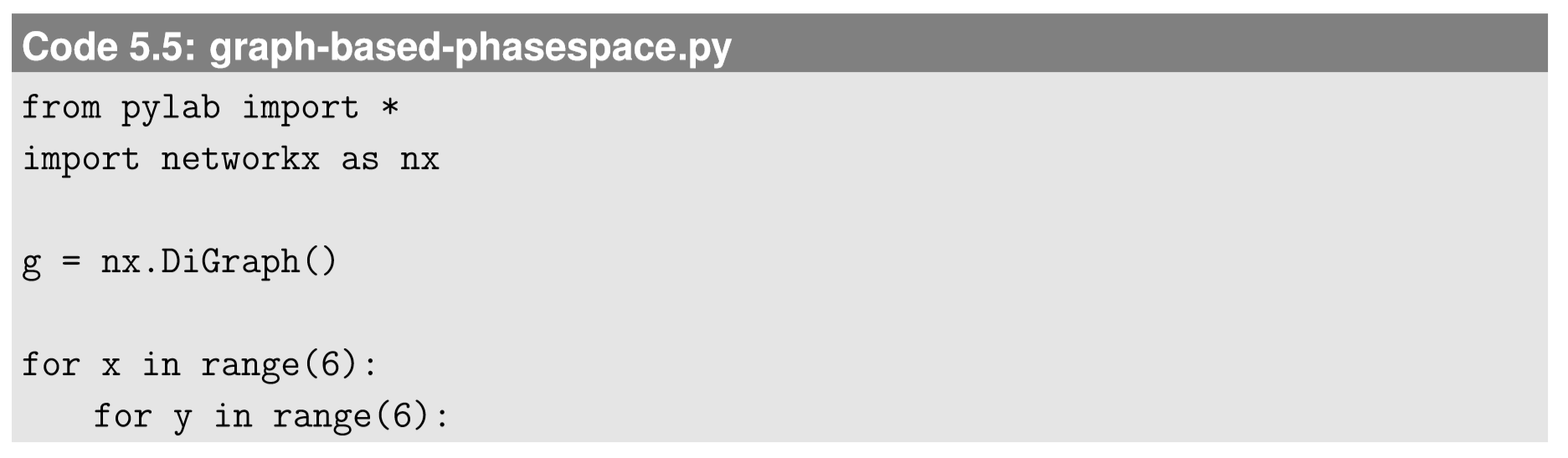
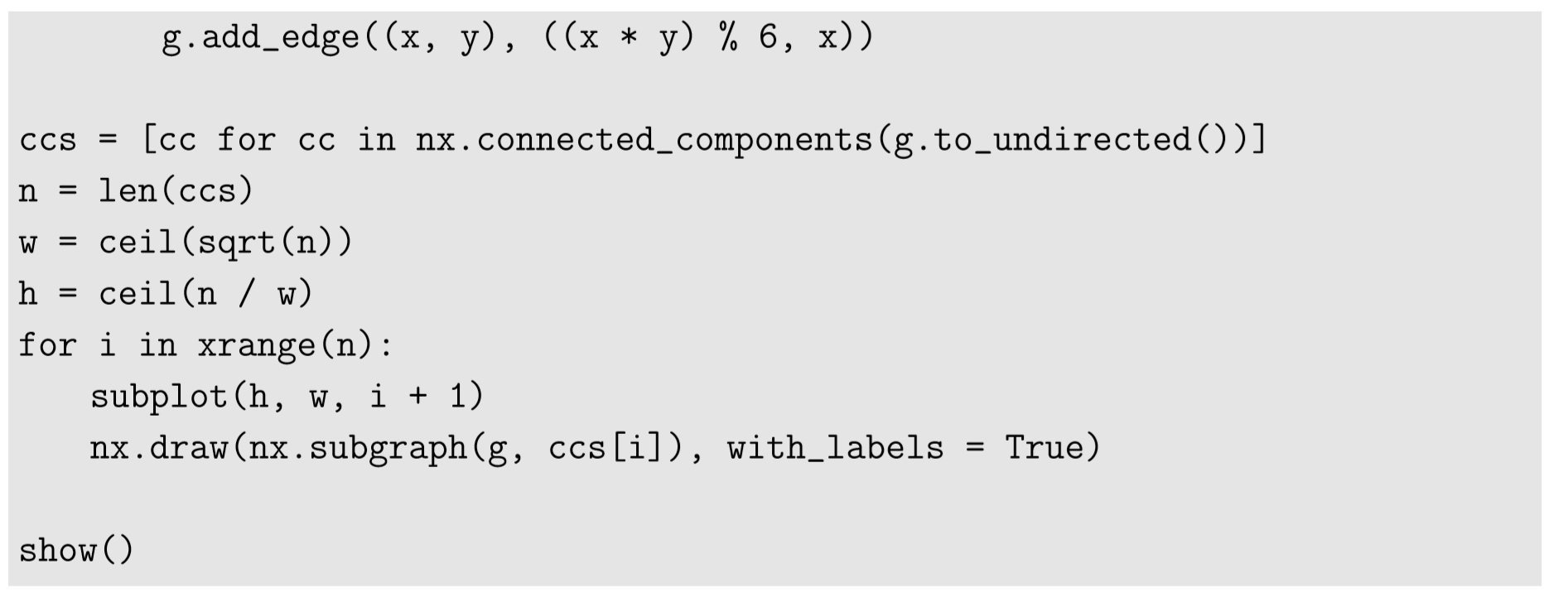
En este ejemplo, un objeto de red, llamado g, se construye usando la clase de objeto DiGraph (grafo dirigido) de NetworkX, porque las transiciones de estado tienen una dirección de un estado a otro. También hice algunos trucos adicionales para mejorar el resultado de la visualización. Dividí la red en múltiples componentes conectados por separado usando la función c onnected_ components de NetworkX, y luego los arreglé en una cuadrícula de parcelas usando la característica de subplot de pylab. El resultado se muestra en la Fig. 5.5.1.
Cada una de las seis redes representa un componente conectado, que corresponde a una cuenca de atracción. Las direcciones de las transiciones están indicadas por segmentos de línea gruesa en lugar de puntas de flecha convencionales, es decir, cada transición va desde el extremo delgado al extremo grueso de una línea (aunque algunos segmentos de línea gruesa están ocultos debajo de los nodos en las áreas abarrotadas). Puedes seguir las indicaciones de esos enlaces para saber a dónde va el sistema en cada cuenca de atracción. El atractor puede ser un solo estado o un bucle dinámico. No te preocupes si no entiendes los detalles de este código de muestra. Discutiremos cómo usar NetworkX con más detalle más adelante.
Dibuje un espacio de fase de la siguiente ecuación de diferencia dentro del rango\(0 ≤ x < 100\) modificando Código 5.5:
\[x_{t} = x^{x_{t-1}}_{t-1} \ mod{100}\ \label{(5.19)} \]