
5.8: La ecuación geodésica
- Page ID
- 127330

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En esta sección, que se puede omitir en una primera lectura, mostramos cómo se pueden utilizar los símbolos de Christoffel para encontrar ecuaciones diferenciales que describen geodésicas.
Caracterización de la geodésica
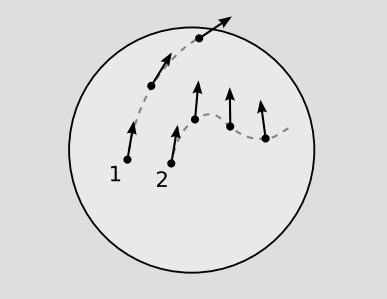
Un geodésico puede definirse como una línea mundial que conserva la tangencia bajo transporte paralelo, Figura\(\PageIndex{1}\). Esta es esencialmente una forma matemática de expresar la noción que anteriormente hemos expresado de manera más informal en términos de “mantenerse en el rumbo” o moverse “inercialmente”.
Una curva se puede especificar dando funciones\(x^{\mu} (\lambda)\) para sus coordenadas, donde\(\lambda\) es un parámetro real. Un vector tendido tangente a la curva puede entonces calcularse usando derivadas parciales,\(T^{\mu} = \frac{\partial x^{\mu}}{\partial \lambda}\). Hay tres formas en las que una función vectorial de\(\lambda\) podría cambiar: (1) podría cambiar por la razón trivial de que la métrica está cambiando, de manera que sus componentes cambiaron cuando se expresan en la nueva métrica; (2) podría cambiar sus componentes perpendiculares a la curva; o (3) podría cambiar su componente paralelo a la curva. La posibilidad 1 no debe considerarse realmente un cambio en absoluto, y la definición de la derivada covariante está diseñada específicamente para ser insensible a este tipo de cosas. 2 no puede aplicarse a T \(\mu\), que es tangente por construcción. Por lo tanto, sería conveniente \(\mu\)que T pasara a ser siempre de la misma longitud. Si es así, entonces 3 tampoco sucedería, y podríamos reexpresar la definición de un geodésico diciendo que la derivada covariante de T \(\mu\)era cero. Por esta razón, asumiremos para el resto de esta sección que la parametrización de la curva tiene esta propiedad. En un contexto newtoniano, podríamos imaginar la x \(\mu\)como coordenadas puramente espaciales, y\(\lambda\) ser una coordenada de tiempo universal. Entonces interpretaríamos T \(\mu\)como la velocidad, y la restricción sería a una parametrización que describiera el movimiento con velocidad constante. En relatividad, la restricción es que\(\lambda\) debe ser un parámetro afín. Por ejemplo, podría ser el tiempo adecuado de una partícula, si la curva en cuestión es similar al tiempo.
Derivada covariante con respecto a un parámetro
La notación de la sección 5.6 no se adapta del todo a nuestros propósitos actuales, ya que nos permite expresar una derivada covariante con respecto a una de las coordenadas, pero no con respecto a un parámetro como\(\lambda\). Nos gustaría anotar la derivada covariante de T \(\mu\)con respecto a\(\lambda\) as\(\nabla_{\lambda} T^{\mu}\), aunque\(\lambda\) no sea una coordenada. Para conectar los dos tipos de derivados, podemos usar una derivada total. Para dejar clara la idea, así es como calculamos una derivada total para una función escalar f (x, y), sin notación tensora:
\[\frac{df}{d \lambda} = \frac{\partial f}{\partial x} \frac{\partial x}{\partial \lambda} + \frac{\partial f}{\partial y} \frac{\partial y}{\partial \lambda}\]
Esto es solo la generalización de la regla de la cadena a una función de dos variables. Por ejemplo, si\(\lambda\) representa tiempo y f temperatura, entonces esto nos diría la tasa de cambio de la temperatura ya que un termómetro se transportaba por el espacio. Aplicando esto al problema actual, expresamos la derivada covariante total como
\[\begin{split} \nabla_{\lambda} T^{\mu} &= (\nabla_{\kappa} T^{\mu}) \frac{dx^{\kappa}}{d \lambda} \\ &= (\partial_{\kappa} T^{\mu} + \Gamma^{\mu}_{\kappa \nu} T^{\nu}) \frac{d x^{\kappa}}{d \lambda} \ldotp \end{split}\]
La ecuación geodésica
Reconociendo\(\frac{\partial_{\kappa} T^{\mu} dx^{\kappa}}{d \lambda}\) como un derivado total no covariante, encontramos
\[\nabla_{\lambda} T^{\mu} = \frac{dT^{\mu}}{d \lambda} + \Gamma^{\mu}_{\kappa \nu} T^{\nu} \frac{dx^{\kappa}}{d \lambda} \ldotp\]
Esto se conoce como la ecuación geodésica. Hay un factor de dos que es un problema común al aplicar esta ecuación. La simetría de los símbolos de Christoffel\(\Gamma^{\mu}_{\kappa \nu} = \Gamma^{\mu}_{\nu \kappa}\) implica que cuando\(\kappa\) y\(\nu\) son distintos, el mismo término aparecerá dos veces en la suma.
Si esta ecuación diferencial se satisface para un parámetro afín\(\lambda\), entonces también se satisface para cualquier otro parámetro afín\(\lambda' = a \lambda + b\), donde a y b son constantes (problema 5). Recordemos que los parámetros afín solo se definen a lo largo de geodésicas, no a lo largo de curvas arbitr
No podemos comenzar definiendo un parámetro afín y luego usarlo para encontrar geodésicas usando esta ecuación, porque no podemos definir un parámetro afín sin antes especificar un geodésico. De igual manera, no podemos hacer primero el geodésico y luego el parámetro afín, porque si ya tuviéramos un geodésico en la mano, no necesitaríamos la ecuación diferencial para encontrar un geodésico. La solución a este enigma de gallina y huevo es anotar las ecuaciones diferenciales e intentar encontrar una solución, sin tratar de especificar de antemano ni el parámetro afín ni el geodésico. Rara vez tendremos ocasión de recurrir a esta técnica, siendo una excepción el ejemplo 19.
Singularidad
La ecuación geodésica es útil para establecer uno de los fundamentos teóricos necesarios de la relatividad, que es la singularidad de la geodésica para un conjunto dado de condiciones iniciales. Esto se relaciona con el axioma O1 de geometría ordenada, que dos puntos determinan una línea, y es necesario físicamente por las razones discutidas en la sección 1.5; brevemente, si la geodésica no se determinara de manera única, entonces las partículas no tendrían forma de decidir cómo moverse. La forma de la ecuación geodésica garantiza la singularidad. Para ver esto, considere el siguiente algoritmo para determinar una aproximación numérica a un geodésico:
- Inicializar\(\lambda\), la x \(\mu\)y sus derivadas\(\frac{dx^{\mu}}{d \lambda}\). Además, establezca un tamaño de paso pequeño\(\Delta \lambda\) por el cual incrementar\(\lambda\) en cada paso a continuación.
- Para cada i, calcule\(\frac{d^{2} x^{\mu}}{d \lambda^{2}}\) usando la ecuación geodésica.
- Agregar\((\frac{d^{2} x^{\mu}}{d \lambda^{2}}) \Delta \lambda\) al valor almacenado actualmente de\(\frac{dx^{\mu}}{d \lambda}\).
- Agregar\((\frac{dx^{\mu}}{d \lambda}) \Delta \lambda\) a x \(\mu\).
- Agregar\(\Delta \lambda\) a\(\lambda\).
- Repita los pasos 2-5 hasta que la geodésica se haya extendido a la distancia afín deseada.
Dado que el resultado del cálculo depende únicamente de las entradas en el paso 1, encontramos que la geodésica está determinada de manera única.
Para ver que esta es realmente una forma válida de probar la singularidad, puede ser útil considerar cómo pudo haber fallado la prueba. Omitiendo algunos de los detalles de los tensores y la multidimensionalidad del espacio, la forma de la ecuación geodésica es esencialmente\(\ddot{x}\ + f \dot{x}^{2} = 0\), donde los puntos indican derivadas con respecto a\(\lambda\). Supongamos que en cambio había tenido la forma\(\ddot{x}^{2} + f \dot{x} = 0\). Entonces en el paso 2 habríamos tenido que escoger ya sea una raíz cuadrada positiva o una negativa para\(\ddot{x}\). Aunque la continuidad por lo general bastaría para mantener un signo consistente de una iteración a la siguiente, eso no funcionaría si alguna vez llegáramos a un punto en el que\(\ddot{x}\) desapareciera momentáneamente. Por lo tanto, una ecuación de esta forma no tendría una solución única para un conjunto dado de condiciones iniciales.
El uso práctico de este algoritmo para calcular la geodésica numéricamente se demuestra en la sección 5.9.