
11.8: Reflexión y simetría
( \newcommand{\kernel}{\mathrm{null}\,}\)
Reflexión y simetría en una línea
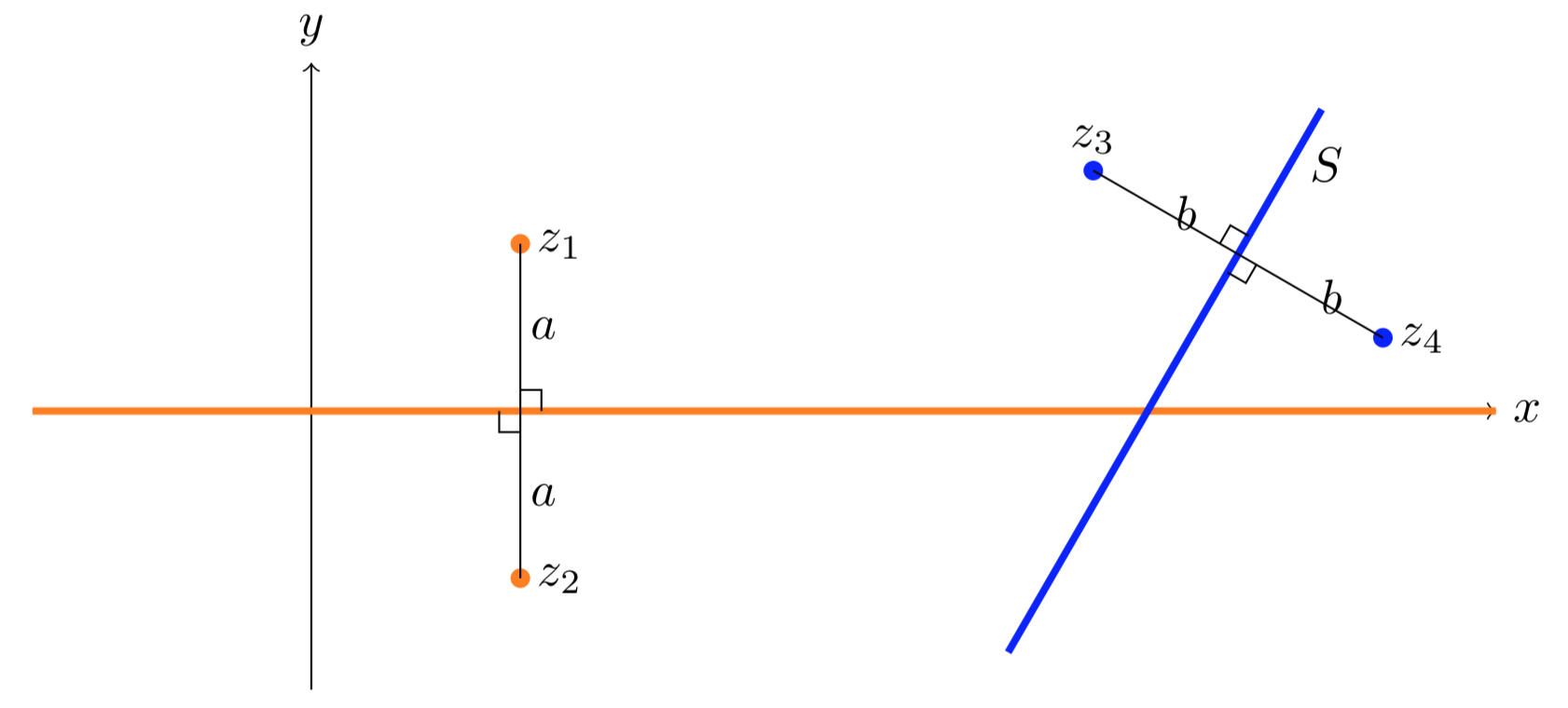
Supongamos que tenemos una líneaS y un puntoz1 no encendidoS. El reflejo dez1 inS es el punto dez2 manera queS es la bisectriza perpendicular al segmento de línea¯z1z2. Dado que existe exactamente uno de esos puntosz2, el reflejo de un punto en una línea es único.
Siz2 es el reflejo dez1 inS, decimos esoz1 yz2 son simétricos con respecto a la líneaS.
En la figura de abajo los puntosz1 yz2 son simétricos en elx eje -eje. Los puntosz3 yz4 son simétricos en la líneaS.
Para definir el reflejo de un punto en un círculo necesitamos trabajar un poco más duro. Mirando hacia atrás al ejemplo anterior podemos mostrar lo siguiente.
Siz1 yz2 son simétricos en la líneaS, entonces cualquier círculo a travész1 ez2 intersectaS ortogonalmente.
- Prueba
-
Llama al círculoC. Ya queS es la bisectriz perpendicular de una cuerda deC, el centro deC se encuentra sobreS. Por lo tanto,S es una línea radial, es decir, se cruzaC ortogonalmente.
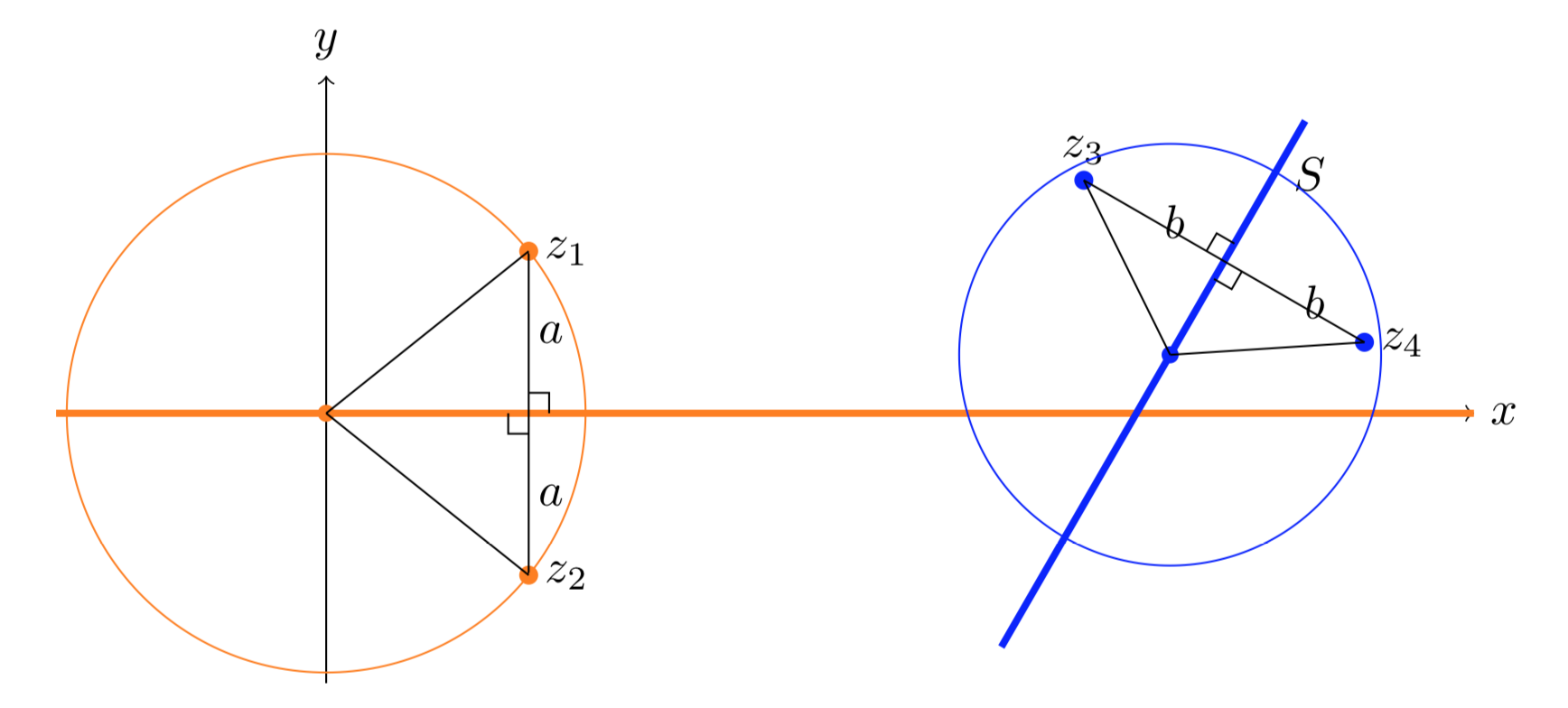
Círculos a través de puntos simétricos intersectan la línea en ángulo recto.
Reflexión y simetría en un círculo
Adaptaremos esto para nuestra definición de reflexión en círculo. Para que la lógica fluya correctamente necesitamos comenzar con la definición de pares simétricos de puntos.
Supongamos queS es una línea o círculo. Un par de puntosz1,z2 se llama simétrico con respecto aS si cada línea o círculo a través de los dos puntos se cruzaS ortogonalmente.
Primero declaramos un hecho casi trivial.
Las transformaciones lineales fraccionarias conservan la simetría. Es decir, siz1,z2 son simétricos en una línea o círculoS, entonces, para un FLTT,T(z1) yT(z2) son simétricos enT(S).
- Prueba
-
La definición de simetría es en términos de líneas y círculos, y ángulos. Las transformaciones lineales fraccionarias mapean líneas y círculos a líneas y círculos y, al ser conformes, conservan los ángulos.
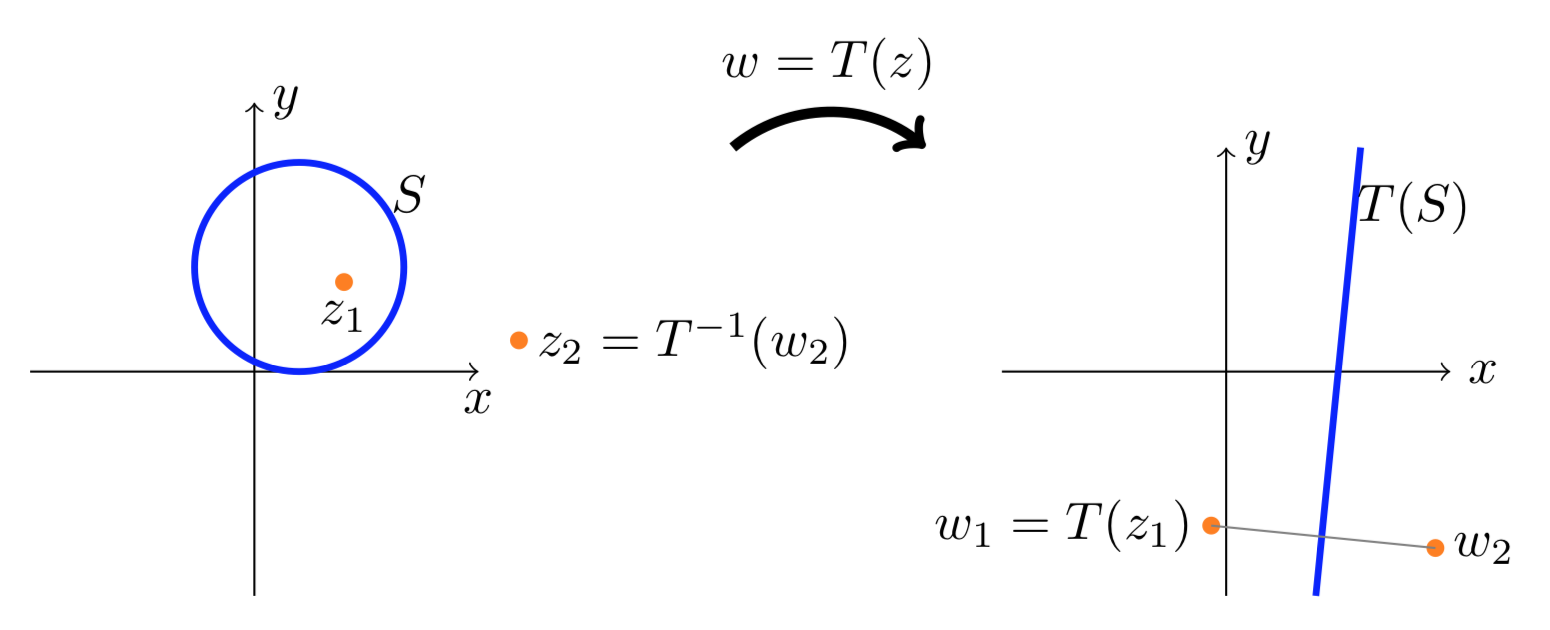
Supongamos queS es una línea o círculo yz1 un punto no encendidoS. Hay un punto únicoz2 tal que el parz1,z2 es simétrico enS.
- Prueba
-
LetT Ser una transformación lineal fraccionaria que se mapeaS a una línea. Sabemos quew1=T(z1) tiene un reflejo únicow2 en esta línea. Ya queT−1 conserva la simetría,z1 yz2=T−1(w2) son simétricos enS. Dado quew2 es el punto único simétrico aw1 lo mismo es cierto paraz2 vis-a-visz1. Todo esto se muestra en la siguiente figura.
Ahora podemos definir la reflexión en un círculo.
El puntoz2 en el Teorema 11.8.1 se llama el reflejo dez1 inS.
Reflejo en el círculo unitario
Usando la característica de preservación de simetría de las transformaciones lineales fraccionarias, comenzamos con una línea y transformamos al círculo. RDejen ser el eje real yC el círculo unitario. Conocemos el FLT
T(z)=z−iz+i
mapasR aC. También sabemos que los puntosz y¯z son simétricos enR. Por lo tanto
w1=T(z)=z−iz+i and w2=T(¯z)=¯z−i¯z+i
son simétricos enD. Al mirar las fórmulas, es claro quew2=1/¯w1. Esto es lo suficientemente importante como para destacarlo como teorema.
El reflejo dez=x+iy=reiθ en el círculo unitario es
1¯z=z|z|2=x+iyx2+y2=eiθr.
Los cálculos de1/¯z son todos triviales.
- Es posible, pero más tedioso y menos perspicaz, llegar a este teorema por cálculo directo.
- Siz está en el círculo unitario entonces1/¯z=z. Es decir,z es su propio reflejo en el círculo unitario —como debería ser.
- El centro del círculo 0 es simétrico al punto en∞.
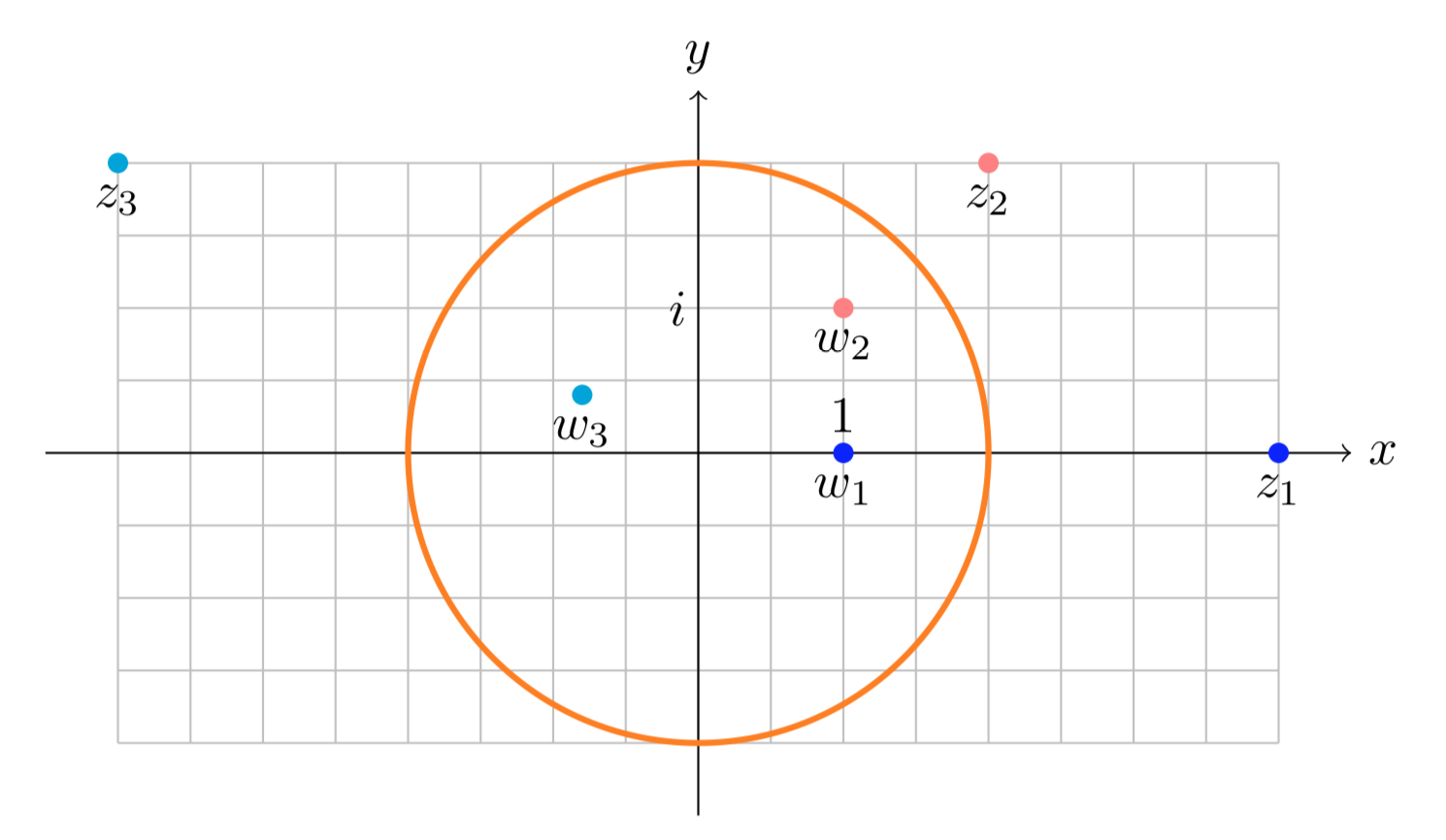
La siguiente figura muestra tres pares de puntos simétricos en el círculo unitario:
z1=2; w1=12, z2=1+i; w2=1+i2, z3=−2+i; w3=−2+i5.
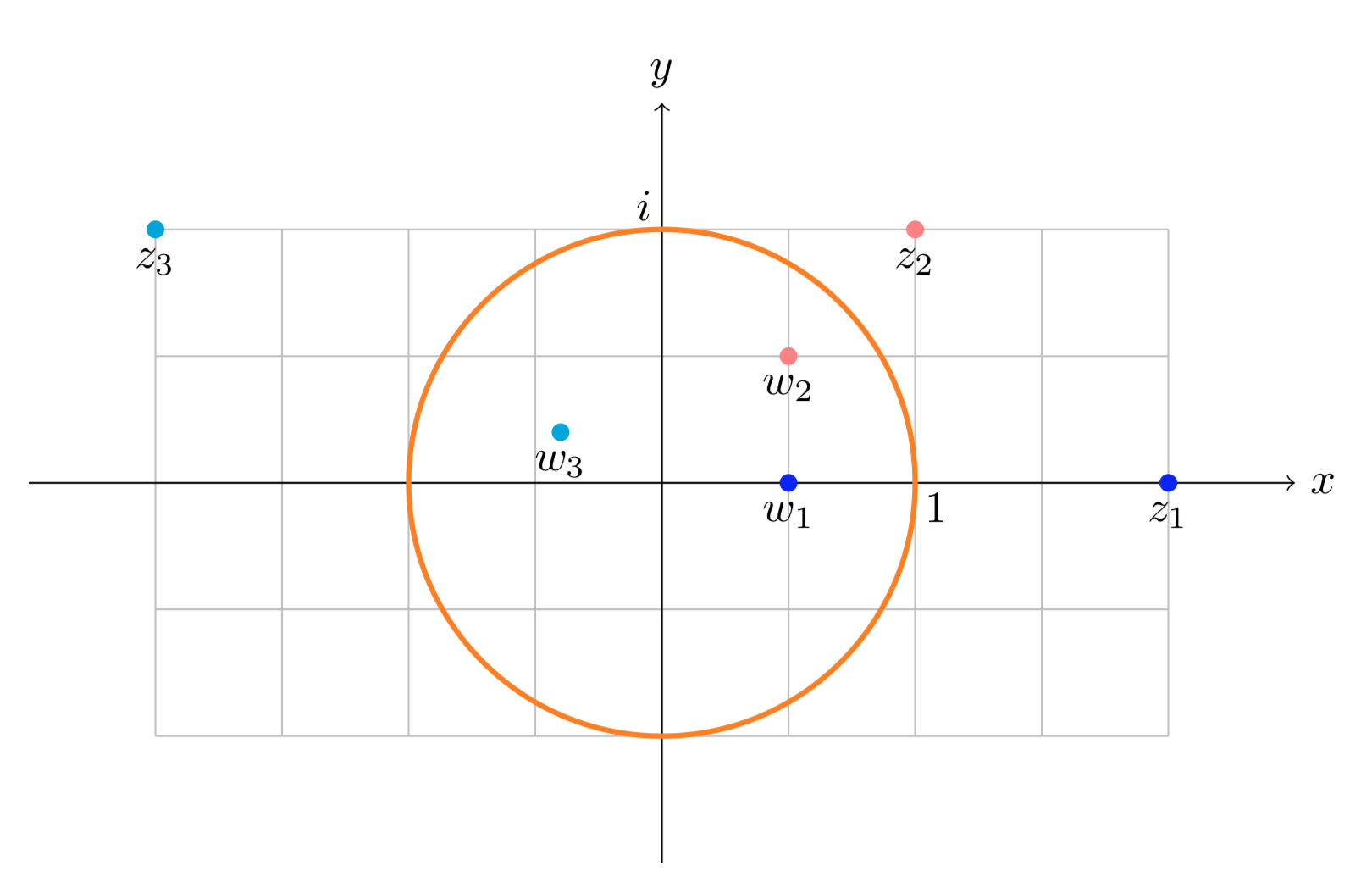
Pares de puntoszj:wj simétricos en el círculo unitario.
Supongamos queSz1 es el círculo|z|=R y es una pinta no puestaS. Encuentra el reflejo dez1 en S.
Solución
Nuestra estrategia es mapearS al círculo unitario, encontrar el reflejo y luego mapear el círculo unitario de nuevo aS.
Comienza con el mapaT(z)=w=z/R. ClaramenteS seT mapea al círculo de la unidad y
w1=T(z1)=z1/R.
El reflejo dew1 es
w2=1/¯w1=R/¯z1.
Mapeo de vuelta desde el círculo de la unidad porT−1 tenemos
z2=T−1(w2)=Rw2=R2/¯z1.
Por lo tanto el reflejo dez1 esR2/¯z1.
Aquí hay tres pares de puntos simétricos en el círculo de radio 2. Tenga en cuenta, que esta es la misma cifra que la de arriba con todo duplicado.
z1=4; w1=1, z2=2+2i; w2=1+i, z3=−4+2i; w3=−4+2i5.
Pares de puntoszj;wj simétricos en el círculo del radio 2.
Encuentra el reflejo dez1 en el círculo de radioR centrado enc.
Solución
VamosT(z)=(z−c)/R. Tmapea el círculo centrado enc al círculo unitario. El mapa inverso es
T−1(w)=Rw+c.
Entonces, el reflejo dez1 se da mapeandoz aT(z), reflejando esto en el círculo unitario, y mapeando de nuevo a la geometría original conT−1. Es decir, la reflexiónz2 es
z1→z1−cR→R¯z1−c→z2=R2¯z1−c+c.
Ahora podemos registrar el siguiente dato importante.
Para un círculoS con centroc el parc,∞ es simétrico con respecto al círculo.
- Prueba
-
Esto es una consecuencia inmediata de la fórmula para la reflexión de un punto en un círculo. Por ejemplo, el reflejo dez en el círculo unitario es1/¯z. Entonces, el reflejo de 0 es infinito.
Mostrar que si un círculo y una línea no se cruzan entonces hay un par de puntosz1,z2 que es simétrico con respecto tanto a la línea como al círculo.
Solución
Al desplazar, escalar y rotar podemos encontrar una transformación lineal fraccionariaT que mapea el círculo y la línea a la siguiente configuración: El círculo se mapea al círculo unitario y la línea a la línea verticalx=a>1.
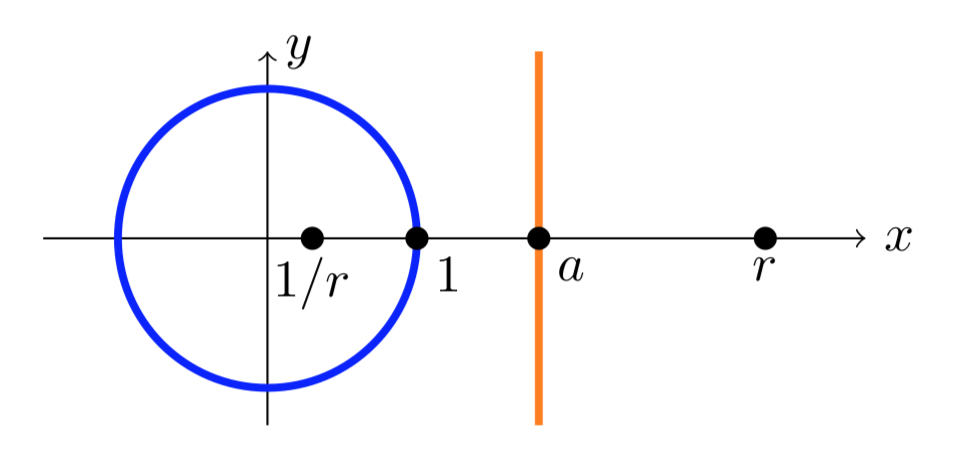
Para cualquier realr,w1=r yw2=1/r son simétricos en el círculo unitario. Podemos elegir un específicor para quer y1/r sean equidistantes dea, es decir, también simétricos en la líneax=a. Está claro geométricamente que esto se puede hacer. Algebraicamente resolvemos la ecuación
r+1/r2=a ⇒ r2−2ar+1=0 ⇒ r=a+√a2−1 ⇒ 1r=a−√a2−1.
Asíz1=T−1(a+√a2−1) yz2=T−1(a−√a2−1) son los puntos requeridos.
Demostrar que si dos círculos no se cruzan entonces hay un par de puntosz1,z2 que es simétrico con respecto a ambos círculos.
Solución
Usando una transformación lineal fraccionaria que mapea uno de los círculos a una línea (y el otro a un círculo) podemos reducir el problema a eso en el ejemplo anterior.
Demuestre que dos círculos cualesquiera que no se crucen pueden mapearse conformalmente a círculos centrados.
Solución
Llama a los círculosS1 yS2. Usando el ejemplo anterior comienza con un par de puntosz1,z2 que son simétricos en ambos círculos. A continuación, elija una transformación lineal fraccionariaT que sez1 mapee a 0 yz2 al infinito. Por ejemplo,
T(z)=z−z1z−z2.
Ya queT conserva la simetría 0 y∞ son simétricas en el círculoT(S1). Esto implica que 0 es el centro deT(S1). Del mismo modo 0 es el centro deT(S2). Así,T(S1) yT(S2) son concéntricos.