
10.2: Una introducción a los vectores
- Page ID
- 111824

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Muchas cantidades en las que pensamos diariamente pueden describirse por un solo número: temperatura, velocidad, costo, peso y altura. También hay muchos otros conceptos que encontramos a diario que no se pueden describir con un solo número. Por ejemplo, un pronosticador del tiempo a menudo describe el viento con su velocidad y su dirección (”\(\ldots\) con vientos del sureste racheados de hasta 30 mph\(\ldots\) “). Al aplicar una fuerza, nos preocupa tanto la magnitud como la dirección de esa fuerza. En ambos ejemplos, la dirección es importante. Debido a esto, estudiamos vectores, objetos matemáticos que transmiten información tanto de magnitud como de dirección.
Una definición “bare—bones” de un vector se basa en lo que escribimos anteriormente: “un vector es un objeto matemático con parámetros de magnitud y dirección”. Esta definición deja mucho que desear, ya que no da ninguna indicación de cómo se va a utilizar tal objeto. Existen varias otras definiciones; elegimos aquí una definición arraigada en una visualización geométrica de vectores. Es muy simplista pero permite fácilmente una mayor investigación.
Vector de definición 51
Un vector es un segmento de línea dirigido.
Dados los puntos\(P\) y\(Q\) (ya sea en el plano o en el espacio), denotamos con\(\vec{PQ}\) el vector de\(P\) a\(Q\). \(P\)Se dice que el punto es el punto inicial del vector, y el punto\(Q\) es el punto terminal.
La magnitud, longitud o norma de\(\vec{PQ}\) es la longitud del segmento de línea\(\overline{PQ}\):
\[\norm{\vec{PQ}} = \norm{\overline{PQ}}.\]
Dos vectores son iguales si tienen la misma magnitud y dirección.
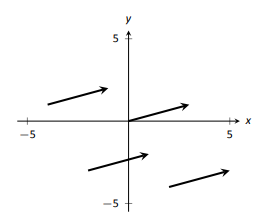
La Figura 10.18 muestra múltiples instancias del mismo vector. Cada segmento de línea dirigida tiene la misma dirección y longitud (magnitud), de ahí que cada uno sea el mismo vector.
Usamos\(\mathbb{R}^2\) (pronunciado “r dos”) para representar todos los vectores en el plano, y usamos\(\mathbb{R}^3\) (pronunciado “r tres”) para representar todos los vectores en el espacio.
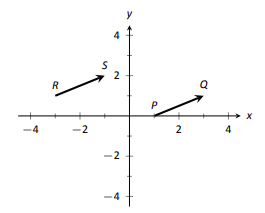
Consideremos los vectores\(\vec{PQ}\) y\(\vec{RS}\) como se muestra en la Figura 10.19. Los vectores parecen ser iguales; es decir, parecen tener la misma longitud y dirección. En efecto, lo son. Ambos vectores se mueven 2 unidades a la derecha y 1 unidad hacia arriba desde el punto inicial para llegar al punto terminal. Se puede analizar este movimiento para medir la magnitud del vector, y el movimiento en sí mismo da información de dirección (también se podría medir la pendiente de la línea que pasa por\(P\) y\(Q\) o\(R\) y\(S\)). Dado que tienen la misma longitud y dirección, estos dos vectores son iguales.
Esto demuestra que intrínsecamente lo único que nos importa es el desplazamiento; es decir, qué tan lejos en el\(x\),\(y\) y posiblemente\(z\) direcciones, está el punto terminal del punto inicial. Tanto los vectores\(\vec{PQ}\) como\(\vec{RS}\) en la Figura 10.19 tienen un\(x\) -desplazamiento de 2 y un\(y\) -desplazamiento de 1. Esto sugiere una forma estándar de describir vectores en el plano. Un vector cuyo\(x\) -desplazamiento es\(a\) y cuyo\(y\) -desplazamiento es\(b\) tendrá punto terminal\((a,b)\) cuando el punto inicial sea el origen,\((0,0)\). Esto nos lleva a una definición de una forma estándar y concisa de referirse a los vectores.
Definición 52 Forma de componente de un vector
- La forma componente de un vector\(\vec{v}\) en\(\mathbb{R}^2\), cuyo punto terminal es\((a,\,b)\) cuando su punto inicial es\((0,\,0)\), es\(\langle a,b\rangle.\)
- La forma componente de un vector\(\vec{v}\) en\(\mathbb{R}^3\), cuyo punto terminal es\((a,\,b,\,c)\) cuando su punto inicial es\((0,\,0,\,0)\), es\(\langle a,b,c\rangle.\)
Los números\(a\),\(b\) (y\(c\), respectivamente) son los componentes de\(\vec v\).
De la definición se desprende que la forma componente del vector\(\vec{PQ}\), donde\(P=(x_1,y_1)\) y\(Q=(x_2,y_2)\) es
\[\vec{PQ} = \langle x_2-x_1, y_2-y_1\rangle;\]
en el espacio, donde\(P=(x_1,y_1,z_1)\) y\(Q=(x_2,y_2,z_2)\), la forma componente de\(\vec{PQ}\) es
\[\vec{PQ} = \langle x_2-x_1, y_2-y_1,z_2-z_1\rangle.\]
Practicamos el uso de esta notación en el siguiente ejemplo.
Ejemplo\(\PageIndex{1}\): Using component form notation for vectors
- Dibuje el vector a\(\vec v=\langle 2,-1\rangle\) partir de\(P=(3,2)\) y encuentre su magnitud.
- Encuentra la forma componente del vector\(\vec w\) cuyo punto inicial es\(R=(-3,-2)\) y cuyo punto terminal es\(S=(-1,2)\).
- Dibuje el vector\(\vec u = \langle 2,-1,3\rangle\) comenzando en el punto\(Q = (1,1,1)\) y encuentre su magnitud.
Solución
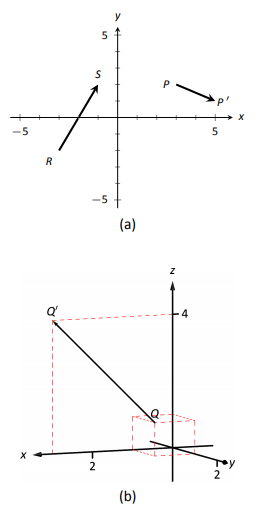
- Usando\(P\) como punto inicial, movemos 2 unidades en la\(x\) dirección positiva y\(-1\) unidades en la\(y\) dirección positiva para llegar al punto terminal\(P\,'=(5,1)\), como se dibuja en la Figura 10.20 (a).
La magnitud de\(\vec v\) se determina directamente a partir de la forma del componente:
\[\norm{\vec v} =\sqrt{2^2+(-1)^2} = \sqrt{5}. \]
- Usando la nota siguiente Definición 52, tenemos
\[\vec{RS} = \langle -1-(-3), 2-(-2)\rangle = \langle 2,4\rangle.\]
Uno puede ver fácilmente en la Figura 10.20 (a) que el\(x\) - y\(y\) -desplazamiento de\(\vec{RS}\) es 2 y 4, respectivamente, como sugiere la forma componente.
- Usando\(Q\) como punto inicial, movemos 2 unidades en la\(x\) dirección positiva,\(-1\) unidad en la\(y\) dirección positiva y 3 unidades en la\(z\) dirección positiva para llegar al punto terminal\(Q' = (3,0,4)\), ilustrado en la Figura 10.20 (b).
La magnitud de\(\vec u\) es:\[\norm{\vec u} = \sqrt{2^2+(-1)^2+3^2} = \sqrt{14}.\]
Ahora que hemos definido vectores, y hemos creado una bonita notación por la que describirlos, comenzamos a considerar cómo los vectores interactúan entre sí. Es decir, definimos un álgebra sobre vectores.
Definición 53 ALGEBRA DE VECTORES
- Dejar\(\vec u = \langle u_1,u_2\rangle\) y\(\vec v = \langle v_1,v_2\rangle\) ser vectores adentro\(\mathbb{R}^2\), y dejar\(c\) ser un escalar.
(a) La suma, o suma, de los vectores\(\vec u\) y\(\vec v\) es el vector\[\vec u+\vec v = \langle u_1+v_1, u_2+v_2\rangle.\]
(b) El producto escalar de\(c\) y\(\vec v\) es el vector\[c\vec v = c\langle v_1,v_2\rangle = \langle cv_1,cv_2\rangle.\]
- Dejar\(\vec u = \langle u_1,u_2,u_3\rangle\) y\(\vec v = \langle v_1,v_2,v_3\rangle\) ser vectores adentro\(\mathbb{R}^3\), y dejar\(c\) ser un escalar.
(a) La suma, o suma, de los vectores\(\vec u\) y\(\vec v\) es el vector\[\vec u+\vec v = \langle u_1+v_1, u_2+v_2, u_3+v_3\rangle.\]
(b) El producto escalar de\(c\) y\(\vec v\) es el vector\[c\vec v = c\langle v_1,v_2,v_3\rangle = \langle cv_1,cv_2,cv_3\rangle.\]
En resumen, decimos que la suma y la multiplicación escalar se calculan “en cuanto a componentes”.
Ejemplo\(\PageIndex{2}\): Adding vectors
Esbozar los vectores\(\vec u = \langle1,3\rangle\),\(\vec v = \langle 2,1\rangle\) y\(\vec u+\vec v\) todos con punto inicial en el origen.
Solución
Primero calculamos\(\vec u +\vec v\).
\ [\ begin {align*}
\ vec u+\ vec v &=\ langle 1,3\ rangle +\ langle 2,1\ rangle\\ rangle\\
&=\ langle 3,4\ rangle.
\ end {align*}\] Todos
estos están bosquejados en la Figura 10.21.
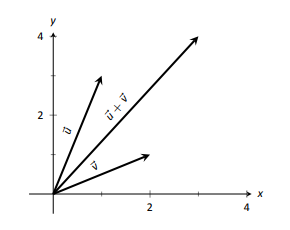
A medida que los vectores transmiten información de magnitud y dirección, la suma de vectores también transmite información de longitud y magnitud. Agregar\(\vec u+\vec v\) sugiere la siguiente idea:
\[\text{"Starting at an initial point, go out \(\vec u\), then go out \(\vec v\)."}\]
Esta idea se esboza en la Figura 10.22, donde el punto inicial de\(\vec v\) es el punto terminal de\(\vec u\). Esto se conoce como la “regla de la cabeza a la cola” de agregar vectores. La adición de vectores es muy importante. Por ejemplo, si los vectores\(\vec u\) y\(\vec v\) representan fuerzas que actúan sobre un cuerpo, la suma\(\vec u+\vec v\) da la fuerza resultante. Debido a diversas aplicaciones físicas de adición de vectores, la suma a menudo\(\vec u+\vec v\) se conoce como el vector resultante, o simplemente el “resultante”.
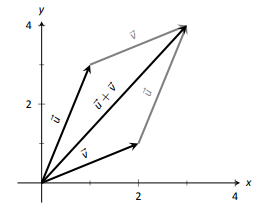
Analíticamente, es fácil verlo\(\vec u+\vec v = \vec v+\vec u\). La Figura 10.22 también da una representación gráfica de esto, utilizando vectores grises. Obsérvese que los vectores\(\vec u\) y\(\vec v\), cuando están dispuestos como en la figura, forman un paralelogramo. Debido a esto, la Regla Cabeza a Cola también se conoce como Ley del Paralelogramo: el vector\(\vec u+\vec v\) se define formando el paralelogramo definido por los vectores\(\vec u\) y\(\vec v\); el punto inicial de\(\vec u+\vec v\) es el punto inicial común del paralelogramo, y el punto terminal de la suma es el punto terminal común del paralelogramo.
Si bien no se ilustra aquí, la Regla de Cabeza a Cola y la Ley de Paralelogramo\(\mathbb{R}^3\) también se mantienen para vectores en.
De las propiedades de los números reales y de la Definición 53 se deduce que\[\vec u-\vec v = \vec u + (-1)\vec v.\]
La Ley del Paralelogramo nos da una buena manera de visualizar esta resta. Esto lo demostramos en el siguiente ejemplo.
Ejemplo\(\PageIndex{3}\): Vector Subtraction
Dejar\(\vec u = \langle 3,1\rangle\) y\(\vec v=\langle 1,2\rangle.\) Calcular y bosquejar\(\vec u-\vec v\).
Solución
El cálculo de\(\vec u-\vec v\) es sencillo, y mostramos todos los pasos a continuación. Por lo general,\((-1)\) se omite el paso formal de multiplicar por y nosotros “simplemente restamos”.
\ [\ begin {align*}
\ vec u-\ vec v &=\ vec u + (-1)\ vec v\\
&=\ langle 3,1\ rangle +\ langle -1, -2\ rangle\\
&=\ langle 2, -1\ rangle.
\ end {alinear*}\]
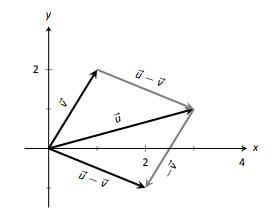
La Figura 10.23 ilustra, usando la Regla de Cabeza a Cola, cómo se puede ver la resta como la suma\(\vec u + (-\vec v)\). La figura también ilustra cómo se\(\vec u-\vec v\) puede obtener mirando solo los puntos terminales de\(\vec u\) y\(\vec v\) (cuando sus puntos iniciales son los mismos).
Ejemplo\(\PageIndex{4}\): Scaling vectors
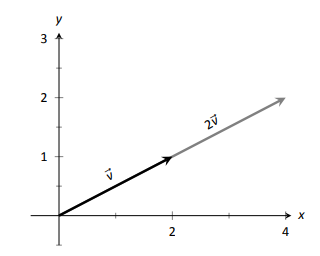
- Esbozar los vectores\(\vec v = \langle 2,1\rangle\) y\(2\vec v\) con punto inicial en el origen.
- Calcular las magnitudes de\(\vec v\) y\(2\vec v\).
Solución
- Calculamos\(2\vec v\):
\[\begin{align*}2\vec v &= 2\langle 2,1\rangle\\&= \langle 4,2\rangle.\end{align*}\]
Ambos\(\vec v\) y\(2\vec v\) están bosquejados en la Figura 10.24. Tomar nota que\(2\vec v\) no inicia en el punto terminal de\(\vec v\); más bien, su punto inicial es también el origen. - La cifra sugiere que\(2\vec v\) es el doble de largo que\(\vec v\). Calculamos sus magnitudes para confirmarlo.
\[\begin{align*}\norm{\vec v} &= \sqrt{2^2+1^2}\\&= \sqrt{5}.\\\norm{2\vec v}&=\sqrt{4^2+2^2} \\&= \sqrt{20}\\&= \sqrt{4\cdot 5} = 2\sqrt{5}.\end{align*}\]
Como sospechábamos,\(2\vec v\) es el doble de largo que\(\vec v\).
El vector cero es el vector cuyo punto inicial es también su punto terminal. Se denota por\(\vec 0\). Su forma componente, en\(\mathbb{R}^2\), es\(\langle 0,0\rangle\); en\(\mathbb{R}^3\), es\(\langle 0,0,0\rangle\). Por lo general, el contexto deja claro si\(\vec 0\) se refiere a un vector en el plano o en el espacio.
Nuestros ejemplos han ilustrado principios clave en álgebra vectorial: cómo sumar y restar vectores y cómo multiplicar vectores por un escalar. El siguiente teorema establece formalmente las propiedades de estas operaciones.
TEORAMA 84 PROPIEDADES DE LAS OPERACIONES
Lo siguiente es cierto para todos los escalares\(c\) y\(d\), y para todos los vectores\(\vec u\),\(\vec v\) y\(\vec w\), dónde\(\vec u\),\(\vec v\) y\(\vec w\) están todos en\(\mathbb{R}^2\) o dónde\(\vec u\),\(\vec v\) y\(\vec w\) están todos en\(\mathbb{R}^3\):
- \(\underbrace{\vec u+\vec v = \vec v+\vec u}_{Commutative Property}\)
- \(\underbrace{\vec u+\vec v)+\vec w = \vec u+(\vec v+\vec w)}_{Associative Property}\)
- \(\underbrace{\vec v+\vec 0 = \vec v}_{Additive Identity}\)
- \((cd)\vec v= c(d\vec v)\)
- \(\underbrace{c(\vec u+\vec v) = c\vec u+c\vec v}_{Distributive Property}\)
- \(\underbrace{(c+d)\vec v = c\vec v+d\vec v}_{Distributive Property}\)
- \(0\vec v = \vec 0\)
- \(\norm{c\vec v} = |c|\cdot\norm{\vec v}\)
- \(\norm u = 0\)si, y sólo si,\(\vec u = \vec 0\).
Como se indicó anteriormente, cada vector\(\vec v\) transmite información de magnitud y dirección. Tenemos un método de extracción de la magnitud, que escribimos como\(\norm{\vec v}\). Los vectores unitarios son una forma de extraer solo la información de dirección de un vector.
Vector de unidad de definición 54
Un vector unitario es un vector\(\vec v\) con una magnitud de 1; es decir,
\[\norm{\vec v}=1.\]
Considere este escenario: se le da un vector\(\vec v\) y se le dice que cree un vector de longitud 10 en la dirección de\(\vec v\). ¿Cómo se hace eso? Si supiéramos que ese\(\vec u\) era el vector unitario en la dirección de\(\vec v\), la respuesta sería fácil:\(10\vec u\). Entonces, ¿cómo nos encontramos\(\vec u\)?
La propiedad 8 del Teorema 84 tiene la clave. Si dividimos\(\vec v\) por su magnitud, se convierte en un vector de longitud 1. Considerar:
\ [\ begin {align*}
\ Big\ |\ frac {1} {\ norm {\ vec v}}\ vec v\ Big\ | &=\ frac {1} {\ norm {\ vec v}}\ norm {\ vec v} &\ text {(podemos sacar\( \frac{1}{\norm{\vec v}}\) ya que es un escalar)}\\
&= 1.
\ end {alinear*}\]
Entonces el vector de longitud 10 en la dirección de\(\vec v\) es\( 10\frac{1}{\norm{\vec v}}\vec v.\) Un ejemplo lo dejará más claro.
Ejemplo\(\PageIndex{5}\): Using Unit Vectors
Dejar\(\vec v= \langle 3,1\rangle\) y dejar\(\vec w = \langle 1,2,2\rangle\).
- Encuentra el vector de unidad en la dirección de\(\vec v\).
- Encuentra el vector de unidad en la dirección de\(\vec w\).
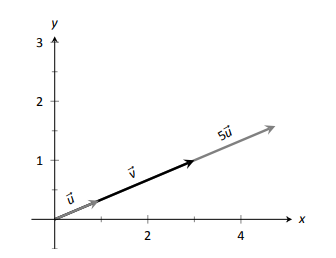
- Encuentra el vector en la dirección de\(\vec v\) con magnitud 5.
Solución
- Nos encontramos\(\norm{\vec v} = \sqrt{10}\). Entonces el vector unitario\(\vec u\) en la dirección de\(\vec v\) es\[\vec u = \frac{1}{\sqrt{10}}\vec v = \langle \frac{3}{\sqrt{10}},\frac{1}{\sqrt{10}}\rangle.\]
- Encontramos\(\norm{\vec w} = 3\), por lo que el vector unitario\(\vec z\) en la dirección de\(\vec w\) es
\[\vec u = \frac13\vec w = \langle \frac13,\frac23,\frac23\rangle.\] - Para crear un vector con magnitud 5 en la dirección de\(\vec v\), multiplicamos el vector unitario\(\vec u\) por 5. Así\(5\vec u = \langle 15/\sqrt{10},5/\sqrt{10}\rangle\) es el vector que buscamos. Esto se esboza en la Figura 10.25.
La formación básica del vector unitario\(\vec u\) en la dirección de un vector\(\vec v\) conduce a una ecuación interesante. Es:
\[\vec v = \norm{\vec v}\frac{1}{\norm{\vec v}}\vec v.\]
Reescribimos la ecuación con paréntesis para hacer un punto:
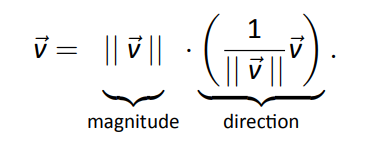
Esta ecuación ilustra el hecho de que un vector tiene tanto magnitud como dirección, donde vemos que un vector unitario suministra solo información de dirección. Identificar vectores unitarios con dirección nos permite definir vectores paralelos.
Definición 55 Vectores Paralelos
- Vectores unitarios\(\vec u_1\) y\(\vec u_2\) son paralelos si\(\vec u_1 = \pm \vec u_2\).
- Vectores distintos de cero\(\vec v_1\) y\(\vec v_2\) son paralelos si sus respectivos vectores unitarios son paralelos.
Es equivalente decir que los vectores\(\vec v_1\) y\(\vec v_2\) son paralelos si hay un escalar\(c\neq 0\) tal que\(\vec v_1 = c\vec v_2\) (ver nota marginal).
Nota:\(\vec 0\) es sin dirección; porque\(\norm{0}=0\), no hay vector de unidad en la “dirección” de\(\vec 0\).
Algunos textos definen dos vectores como paralelos si uno es un múltiplo escalar del otro. Por esta definición,\(\vec 0\) es paralelo a todos los vectores como\(\vec 0 = 0\vec v\) para todos\(\vec v\).
Preferimos la definición dada de paralelo ya que se basa en el hecho de que los vectores unitarios proporcionan información de dirección. Se puede adoptar la convención que\(\vec 0\) es paralela a todos los vectores si así lo desean.
Si uno grafica todos los vectores unitarios\(\mathbb{R}^2\) con el punto inicial en el origen, entonces los puntos terminales estarían todos en el círculo unitario. Con base en lo que sabemos de la trigonometría, podemos decir entonces que la forma componente de todos los vectores unitarios en\(\mathbb{R}^2\) es\(\langle \cos\theta,\sin\theta\rangle\) para algún ángulo\(\theta\).
Una construcción similar en\(\mathbb{R}^3\) muestra que los puntos terminales se encuentran todos en la esfera unitaria. Estos vectores también tienen una forma de componente particular, pero su derivación no es tan sencilla como la de los vectores unitarios en\(\mathbb{R}^2\). Conceptos importantes sobre vectores unitarios se dan en la siguiente Idea Clave.
CLAVE IDEA VECTORES DE 48
- El vector unitario en la dirección de\(\vec v\) es\[ \vec u = \frac1{\norm{\vec v}} \vec v.\]
- Un vector\(\vec u\) in\(\mathbb{R}^2\) es un vector unitario si, y solo si, su forma componente es\(\langle \cos\theta,\sin\theta\rangle\) para algún ángulo\(\theta\).
- Un vector\(\vec u\) in\(\mathbb{R}^3\) es un vector unitario si, y solo si, su forma componente es\(\langle \sin\theta\cos\varphi,\sin\theta\sin\varphi,\cos\theta\rangle\) para algunos ángulos\(\theta\) y\(\varphi\).
Estas fórmulas pueden ser útiles en una variedad de situaciones, especialmente la fórmula para vectores unitarios en el plano.
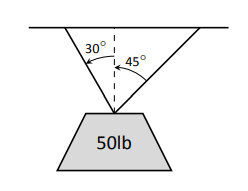
Ejemplo\(\PageIndex{6}\): Finding Component Forces
Considera un peso de 50lb colgando de dos cadenas, como se muestra en la Figura 10.26. Una cadena hace un ángulo de\(30^\circ\) con la vertical, y la otra un ángulo de\(45^\circ\). Encuentra la fuerza aplicada a cada cadena.
Solución
Sabiendo que la gravedad está tirando del peso de 50lb hacia abajo, podemos crear un vector\(\vec F\) para representar esta fuerza.
\[\vec F = 50\langle 0,-1\rangle = \langle 0,-50\rangle.\]
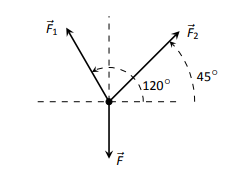
Podemos ver cada cadena como “tirando” del peso hacia arriba, evitando que se caiga. Podemos representar la fuerza de cada cadena con un vector. Dejar\(\vec F_1\) representar la fuerza de la cadena haciendo un ángulo de\(30^\circ\) con la vertical, y dejar\(\vec F_2\) representar la fuerza de la otra cadena. Convierta todos los ángulos a medir desde la horizontal (como se muestra en la Figura 10.27) y aplique la Idea Clave 48. Como aún no conocemos las magnitudes de estos vectores, (ese es el problema que nos ocupa), los usamos\(m_1\) y\(m_2\) para representarlos.
\[\vec F_1 = m_1\langle \cos 120^\circ,\sin120^\circ\rangle\]
\[\vec F_2 = m_2\langle \cos 45^\circ,\sin45^\circ\rangle\]
Como el peso no se mueve, sabemos que la suma de las fuerzas es\(\vec 0\). Esto da:
\ [\ begin {align*}
\ vec F +\ vec F_1 +\ vec F_2 & =\ vec 0\
\ langle 0, -50\ rangle + m_1\ langle\ cos 120^\ circ,\ sin120^\ circ\ rangle + m_2\ langle\ cos 45^\ circ,\ sin45^\ circ\ rangle &= vec 0
\ final {alinear*}\]
La suma de las entradas en el primer componente es 0, y la suma de las entradas en el segundo componente también es 0. Esto nos lleva a las siguientes dos ecuaciones:
\ [\ begin {align*}
m_1\ cos120^\ circ + m_2\ cos45^\ circ &=0\
m_1\ sin120^\ circ + m_2\ sin45^\ circ &=50
\ end {align*}\]
Este es un sistema simple de ecuaciones lineales de 2 ecuaciones, 2 descubiertas. Dejamos al lector verificar que la solución es
\[m_1=50(\sqrt{3}-1) \approx 36.6;\qquad m_2=\frac{50\sqrt{2}}{1+\sqrt{3}} \approx 25.88.\]
Puede parecer extraño que la suma de las fuerzas aplicadas a las cadenas sea superior a 50lb. Dejamos que una clase de física discuta todos los detalles, pero ofrezcamos esta breve explicación. Nuestras ecuaciones se establecieron de manera que los componentes verticales de cada fuerza sumen a 50lb, soportando así el peso. Dado que las cadenas están en ángulo, también tiran unas contra otras, creando una fuerza horizontal “adicional” mientras sostienen el peso en su lugar.
Los vectores unitarios fueron muy importantes en el cálculo previo; nos permitieron definir un vector en la dirección correcta pero con una magnitud desconocida. Nuestros cálculos se computaron en función de componentes. Debido a que tales cálculos suelen ser necesarios, los vectores unitarios estándar pueden ser útiles.
Definición 56 Vectores de unidad estándar
- En\(\mathbb{R}^2\), los vectores unitarios estándar son
\[\vec i = \langle 1,0\rangle \quad \text{and}\quad \vec j = \langle 0,1\rangle.\] - En\(\mathbb{R}^3\), los vectores unitarios estándar son
\[\vec i = \langle 1,0,0\rangle \quad \text{and}\quad \vec j = \langle 0,1,0\rangle \quad \text{and}\quad \vec k = \langle 0,0,1\rangle.\]
Ejemplo\(\PageIndex{7}\): Using standard unit vectors
- Reescribir\(\vec v = \langle 2,-3\rangle\) usando los vectores unitarios estándar.
- Reescribir\(\vec w = 4\vec i - 5\vec j +2\vec k\) en forma de componente.
Solución
- \[\begin{align}\vec v &= \langle 2,-3\rangle \\&= \langle 2,0\rangle + \langle 0,-3\rangle \\&= 2\langle 1,0\rangle -3\langle 0,1\rangle\\&= 2\vec i - 3\vec j\end{align}\]
- \[\begin{align}\vec w &= 4\vec i - 5\vec j +2\vec k\\&= \langle 4,0,0\rangle +\langle 0,-5,0\rangle + \langle 0,0,2\rangle \\&= \langle 4,-5,2\rangle\end{align}\]
Estos dos ejemplos demuestran que la conversión entre la forma componente y los vectores unitarios estándar es bastante sencillo. Muchos matemáticos prefieren la forma componente, y es la notación preferida en este texto. Muchos ingenieros prefieren usar los vectores de unidad estándar, y muchos textos de ingeniería usan esa notación.
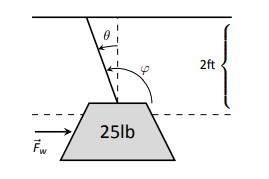
Ejemplo\(\PageIndex{8}\): Finding Component Force
Un peso de 25lb se suspende de una cadena de 2ft de longitud mientras un viento empuja el peso hacia la derecha con una fuerza constante de 5lb como se muestra en la Figura 10.28. ¿Qué ángulo hará la cadena con la vertical como resultado del empuje del viento? ¿Cuánto más alto será el peso?
Solución
La fuerza del viento está representada por el vector\(\vec F_w = 5\vec i\). La fuerza de gravedad sobre el peso está representada por\(\vec F_g = -25\vec j\). La dirección y magnitud del vector que representa la fuerza sobre la cadena son desconocidas. Representamos esta fuerza con\[\vec F_c = m\langle \cos\varphi,\sin\varphi\rangle = m\cos\varphi\, \vec i + m\sin\varphi\,\vec j\] por alguna magnitud\(m\) y algún ángulo con la horizontal\(\varphi\). (Nota:\(\theta\) es el ángulo que la cadena hace con la vertical;\(\varphi\) es el ángulo con la horizontal.)
Como el peso está en equilibrio, la suma de las fuerzas es\(\vec0\):
\ [\ begin {align*}
\ vec f_c +\ vec f_w +\ vec f_g &=\ vec 0\\
m\ cos\ varphi\,\ vec i + m\ sin\ varphi\,\ vec j + 5\ vec i - 25\ vec j &=\ vec 0
final {alinear*}\]
Así la suma de los\(\vec j\) componentes\(\vec i\) y es 0, llevándonos al siguiente sistema de ecuaciones:
\[5+m\cos\varphi = 0\]
\[-25+m\sin\varphi = 0\label{eq:vect8}\]
Esto es suficiente para determinar\(\vec F_c\) ya, como sabemos\(m\cos \varphi = -5\) y\(m\sin\varphi =25\). Así\(F_c = \langle -5,25\rangle.\) podemos usar esto para encontrar la magnitud\(m\): Entonces
\[m = \sqrt{(-5)^2+25^2} = 5\sqrt{26}\approx 25.5\text{lb}.\]
podemos usar cualquiera de la igualdad de la ecuación\ ref {eq:vect8} para resolver para\(\varphi\). Elegimos la primera igualdad ya que usando arccosine devolverá un ángulo en el\(2^\text{nd}\) cuadrante:
\[5 + 5\sqrt{26}\cos \varphi = 0 \quad \Rightarrow \quad \varphi = \cos^{-1}\left(\frac{-5}{5\sqrt{26}}\right) \approx 1.7682\approx 101.31^\circ.\]
Restar\(90^\circ\) de este ángulo nos da un ángulo de\(11.31^\circ\) con la vertical.
Ahora podemos usar la trigonometría para averiguar qué tan alto se levanta el peso. El diagrama muestra que se forma un triángulo rectángulo con la cadena de 2ft como la hipotenusa con un ángulo interior de\(11.31^\circ\). La longitud del lado adyacente (en el diagrama, la línea vertical discontinua) es\(2\cos 11.31^\circ \approx 1.96\) ft. Así el peso es levantado en unos\(0.04\) pies, casi 1/2in.
El álgebra que hemos aplicado a los vectores ya se está demostrando ser muy útil. Hay dos operaciones fundamentales más que podemos realizar con vectores, el producto punto y el producto cruzado. Las dos secciones siguientes exploran cada una a su vez.