
11.1: Modelado del ojo




- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Déjame modelar la temperatura en un modelo sencillo del ojo, donde el ojo es una esfera, y los párpados son circulares. En ese caso podemos poner elz eje -recto por la mitad del ojo, y podemos suponer que la temperatura sólo depende der,θ y no deϕ. Suponemos que la parte del ojo en contacto con el aire está a una temperatura de20∘ C, y la parte en contacto con el cuerpo está en36∘ C.
Figura11.1.1: La temperatura en el exterior de un modelo simple del ojo
Si buscamos la temperatura de estado estacionario se describe por la ecuación de Laplace,
∇2u(r,θ)=0.
Expresando el laplaciano∇2 en coordenadas esféricas (ver capítulo 7) encontramos
1r2∂∂r (r2∂∂ru)+1r2sinθ∂∂θ (sinθ∂∂θu)=0.
Una vez más resolvemos la ecuación por separación de variables,
u(r,θ)=R(r)T(θ).
Después de esta sustitución nos damos cuenta de que
[r2R′]′R=−[sinθT′]′Tsinθ=λ.
SeR mostrará que la ecuación para es fácil de resolver (más adelante). El paraT es de mucho más interés. Ya que para los problemas 3D la dependencia angular es más complicada, mientras que en 2D las funciones angulares eran solo senos y cosenos.
La ecuación paraT es
[sinθT′]′+λTsinθ=0.
Esta ecuación se llama ecuación de Legendre, o en realidad lleva ese nombre después de cambiar las variables ax=cosθ. Desdeθ corre de0 aπ, nos encontramossinθ>0, y tenemos
sinθ=√1−x2.
Después de esta sustitución estamos haciendo el cambio de variables encontramos la ecuación (y(x)=T(θ)=T(arccosx), y ahora diferenciamos w.r.t.x,d/dθ=−√1−x2d/dx)
ddx[(1−x2)dydx]+λy=0.
Esta ecuación se ve fácilmente como autoadconjunta. No es muy difícil demostrar quex=0 es un punto regular (no singular) — pero la ecuación es singular enx=±1. Cercax=0 podemos resolverlo mediante la sustitución directa de una serie Taylor,
y(x)=∑j=0ajxj.
Encontramos la ecuación
∞∑j=0j(j−1)ajxj−2−∞∑j=0j(j−1)ajxj−2∞∑j=0jajxj+λ∞∑j=0ajxj=0
Después de introducir la nueva variablei=j−2, tenemos
∞∑j=0(i+1)(i+1)ai+2xi−∞∑j=0[j(j+1)−λ]ajxj=0.
Recogiendo los términos del pedidoxk, encontramos la relación de recurrenciaak+2=k(k+1)−λ(k+1)(k+2)ak.
Siλ=n(n+1) esta serie termina —en realidad esas son las únicas soluciones aceptables, cualquiera queλ tome un valor diferente realmente diverge enx=+1 ox=−1, no es aceptable para una cantidad física— no puede simplemente divergir en el polo norte o sur (x=cosθ=±1son el norte y polo sur de una esfera).
Por lo tanto, tenemos,n incluso,
yn=a0+a2x2+…+anxn.
Para imparn encontramos polinomios impares,
yn=a1x+a3x3+…+anxn.
Uno define convencionalmentean=(2n)!n!22n.
Con esta definición obtenemos
P0=1, P1=x,P2=32x2−12,P3=12(5x3−3x),P4=18(35x4−30x2+3),P5=18(63x5−70x3+15x).
Una gráfica de estos polinomios se puede encontrar en la figura11.1.2.
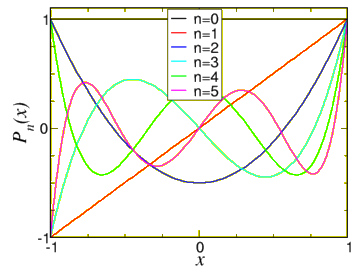
Figura11.1.2: Los primeros polinomios de LegendrePn(x).