
6.5: Aplicaciones Físicas de Integración
- Page ID
- 116157

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Determinar la masa de un objeto unidimensional a partir de su función de densidad lineal.
- Determinar la masa de un objeto circular bidimensional a partir de su función de densidad radial.
- Calcular el trabajo realizado por una fuerza variable que actúa a lo largo de una línea.
- Calcular el trabajo realizado en el bombeo de un líquido de una altura a otra.
- Encuentra la fuerza hidrostática contra una placa vertical sumergida.
En esta sección, examinamos algunas aplicaciones físicas de integración. Comencemos con una mirada al cálculo de masa a partir de una función de densidad. Después volvemos nuestra atención al trabajo, y cerramos la sección con un estudio de la fuerza hidrostática.
Masa y Densidad
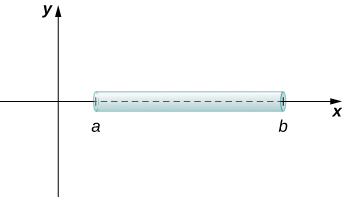
Podemos usar la integración para desarrollar una fórmula para calcular la masa basada en una función de densidad. Primero consideramos una varilla o alambre delgado. Orientar la varilla para que se alinee con el\(x\) eje, con el extremo izquierdo de la varilla en\(x=a\) y el extremo derecho de la varilla en\(x=b\) (Figura\(\PageIndex{1}\)). Tenga en cuenta que aunque representamos la varilla con cierto grosor en las figuras, para fines matemáticos asumimos que la varilla es lo suficientemente delgada como para ser tratada como un objeto unidimensional.
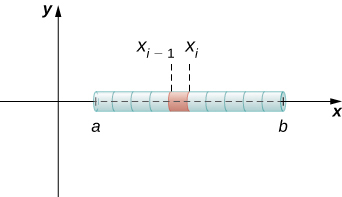
Si la varilla tiene densidad constante\(ρ\), dada en términos de masa por unidad de longitud, entonces la masa de la varilla es solo el producto de la densidad y la longitud de la varilla:\((b−a)ρ\). Si la densidad de la varilla no es constante, sin embargo, el problema se vuelve un poco más desafiante. Cuando la densidad de la varilla varía de punto a punto, utilizamos una función de densidad lineal,\(ρ(x)\), para denotar la densidad de la varilla en cualquier punto,\(x\). Let\(ρ(x)\) Ser una función de densidad lineal integrable. Ahora, para\(i=0,1,2,…,n\) dejar\(P={x_i}\) ser una partición regular del intervalo\([a,b]\), y para\(i=1,2,…,n\) elegir un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). La figura\(\PageIndex{2}\) muestra un segmento representativo de la varilla.
La masa\(m_i\) del segmento de la varilla de\(x_{i−1}\) a\(x_i\) se aproxima por
\[ \begin{align*} m_i ≈ρ(x^∗_i)(x_i−x_{i−1}) \\[4pt] =ρ(x^∗_i)Δx. \end{align*} \nonumber \]
Sumando las masas de todos los segmentos nos da una aproximación para la masa de toda la varilla:
\[ \begin{align*} m =\sum_{i=1}^nm_i \\[4pt] ≈\sum_{i=1}^nρ(x^∗_i)Δx. \end{align*} \nonumber \]
Se trata de una suma de Riemann. Tomando el límite como\(n→∞\), obtenemos una expresión para la masa exacta de la varilla:
\[ \begin{align*} m =\lim_{n→∞}\sum_{i=1}^nρ(x^∗_i)Δx \\[4pt] =\int ^b_aρ(x)dx. \end{align*} \nonumber \]
Anotamos este resultado en el siguiente teorema.
Dada una varilla delgada orientada a lo largo del\(x\) eje sobre el intervalo\([a,b]\), vamos a\(ρ(x)\) denotar una función de densidad lineal que da la densidad de la varilla en un punto\(x\) en el intervalo. Entonces la masa de la vara viene dada por
\[m=\int ^b_aρ(x)dx. \label{density1} \]
Aplicamos este teorema en el siguiente ejemplo.
Considera una varilla delgada orientada en el\(x\) eje a lo largo del intervalo\([π/2,π]\). Si la densidad de la varilla viene dada por\(ρ(x)=\sin x\), ¿cuál es la masa de la varilla?
Solución
Aplicando la ecuación\ ref {density1} directamente, tenemos
\[ \begin{align*} m =\int ^b_aρ(x)dx \nonumber \\[4pt] = \int ^π_{π/2}\sin x \,dx \nonumber \\[4pt] = −\cos x \Big|^π_{π/2} \nonumber \\[4pt] = 1. \nonumber \end{align*}\]
Considera una varilla delgada orientada en el\(x\) eje a lo largo del intervalo\([1,3]\). Si la densidad de la varilla viene dada por\(ρ(x)=2x^2+3,\) ¿cuál es la masa de la varilla?
- Pista
-
Utilice el proceso del ejemplo anterior.
- Solución
-
\(70/3\)
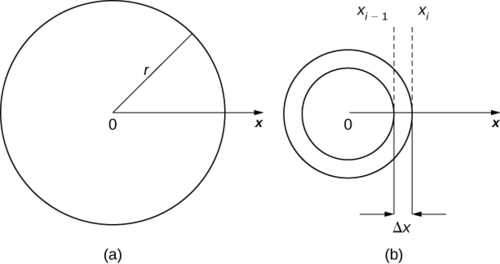
Ahora ampliamos este concepto para encontrar la masa de un disco bidimensional de radio\(r\). Al igual que con la varilla que miramos en el caso unidimensional, aquí asumimos que el disco es lo suficientemente delgado como para que, con fines matemáticos, podamos tratarlo como un objeto bidimensional. Suponemos que la densidad se da en términos de masa por unidad de área (llamada densidad de área), y además asumimos que la densidad varía solo a lo largo del radio del disco (llamada densidad radial). Orientamos el disco en el\(xy-plane\), con el centro en el origen. Entonces, la densidad del disco puede ser tratada como una función de\(x\), denotada\(ρ(x)\). Asumimos que\(ρ(x)\) es integrable. Debido a que la densidad es una función de\(x\), particionamos el intervalo\([0,r]\) a lo largo del\(x\) eje. For\(i=0,1,2,…,n\), let\(P={x_i}\) be a regular partition of the interval\([0,r]\), y for\(i=1,2,…,n\), elige un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). Ahora, use la partición para dividir el disco en arandelas delgadas (bidimensionales). Un disco y una arandela representativa se representan en la siguiente figura.
Ahora aproximamos la densidad y el área de la lavadora para calcular una masa aproximada,\(m_i\). Tenga en cuenta que el área de la lavadora viene dada por
\[ \begin{align*} A_i =π(x_i)^2−π(x_{i−1})^2 \\[4pt] =π[x^2_i−x^2_{i−1}] \\[4pt] =π(x_i+x_{i−1})(x_i−x_{i−1}) \\[4pt] =π(x_i+x_{i−1})Δx. \end{align*}\]
Tal vez recuerde que teníamos una expresión similar a esta cuando estábamos calculando volúmenes por shells. Como lo hicimos allí, usamos\(x^∗_i≈(x_i+x_{i−1})/2\) para aproximar el radio promedio de la arandela. Obtenemos
\[A_i=π(x_i+x_{i−1})Δx≈2πx^∗_iΔx. \nonumber \]
Usando\(ρ(x^∗_i)\) para aproximar la densidad de la arandela, aproximamos la masa de la arandela por
\[m_i≈2πx^∗_iρ(x^∗_i)Δx. \nonumber \]
Sumando las masas de las arandelas, vemos que la masa\(m\) de todo el disco se aproxima
\[m=\sum_{i=1}^nm_i≈\sum_{i=1}^n2πx^∗_iρ(x^∗_i)Δx. \nonumber \]
Nuevamente reconocemos esto como una suma de Riemann, y tomamos el límite como\(n→∞.\) Esto nos da
\[ \begin{align*} m =\lim_{n→∞}\sum_{i=1}^n2πx^∗_iρ(x^∗_i)Δx \\[4pt] =\int ^r_02πxρ(x)dx. \end{align*}\]
Resumimos estos hallazgos en el siguiente teorema.
Let\(ρ(x)\) ser una función integrable que representa la densidad radial de un disco de radio\(r\). Entonces la masa del disco viene dada por
\[m=\int ^r_02πxρ(x)dx. \label{massEq1} \]
Dejar\(ρ(x)=\sqrt{x}\) representar la densidad radial de un disco. Calcular la masa de un disco de radio 4.
Solución
Aplicando la Ecuación\ ref {masSeQ1}, encontramos
\[ \begin{align*} m =\int ^r_02πxρ(x)dx \nonumber \\[4pt] =\int ^4_02πx\sqrt{x}dx=2π\int ^4_0x^{3/2}dx \nonumber \\[4pt] =2π\dfrac{2}{5}x^{5/2}∣^4_0=\dfrac{4π}{5}[32] \nonumber \\[4pt] =\dfrac{128π}{5}.\nonumber \end{align*}\]
Dejar\(ρ(x)=3x+2\) representar la densidad radial de un disco. Calcular la masa de un disco de radio 2.
- Pista
-
Utilice el proceso del ejemplo anterior.
- Solución
-
\(24π\)
Trabajo realizado por una Fuerza
Consideramos ahora el trabajo. En física, el trabajo está relacionado con la fuerza, que a menudo se define intuitivamente como un empuje o un tirón sobre un objeto. Cuando una fuerza mueve un objeto, decimos que la fuerza sí funciona sobre el objeto. En otras palabras, el trabajo puede pensarse como la cantidad de energía que se necesita para mover un objeto. Según la física, cuando tenemos una fuerza constante, el trabajo puede expresarse como producto de la fuerza y la distancia.
En el sistema inglés, la unidad de fuerza es la libra y la unidad de distancia es el pie, por lo que el trabajo se da en pie-libras. En el sistema métrico se utilizan kilogramos y metros. Un newton es la fuerza necesaria para acelerar\(1\) kilogramo de masa a razón de\(1\) m/seg 2. Así, la unidad de trabajo más común es el newton-metro. Esta misma unidad también se llama el joule. Ambos se definen como kilogramos por metros cuadrados sobre segundos cuadrados\((kg⋅m^2/s^2).\)
Cuando tenemos una fuerza constante, las cosas son bastante fáciles. Es raro, sin embargo, que una fuerza sea constante. El trabajo realizado para comprimir (o alargar) un resorte, por ejemplo, varía dependiendo de hasta qué punto el resorte ya se haya comprimido (o estirado). Nos fijamos en los resortes con más detalle más adelante en esta sección.
Supongamos que tenemos una fuerza variable\(F(x)\) que mueve un objeto en una dirección positiva a lo largo del\(x\) eje -de punto\(a\) a punto\(b\). Para calcular el trabajo realizado, particionamos el intervalo\([a,b]\) y estimamos el trabajo realizado en cada subintervalo. Entonces, para\(i=0,1,2,…,n\), deja\(P={x_i}\) ser una partición regular del intervalo\([a,b]\), y para\(i=1,2,…,n\), elige un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). Para calcular el trabajo realizado para mover un objeto de punto\(x_{i−1}\) a punto\(x_i\), asumimos que la fuerza es aproximadamente constante a lo largo del intervalo, y la usamos\(F(x^∗_i)\) para aproximar la fuerza. El trabajo realizado a lo largo del intervalo\([x_{i−1},x_i]\), entonces, viene dado por
\[W_i≈F(x^∗_i)(x_{i}−x_{i−1})=F(x^∗_i)Δx. \nonumber \]
Por lo tanto, el trabajo realizado a lo largo del intervalo\([a,b]\) es aproximadamente
\[W=\sum_{i=1}^nW_i≈\sum_{i=1}^nF(x^∗_i)Δx. \nonumber \]
Tomando el límite de esta expresión como nos\(n→∞\) da el valor exacto para el trabajo:
\[ \begin{align*} W =\lim_{n→∞}\sum_{i=1}^nF(x^∗_i)Δx \\[4pt] =\int ^b_aF(x)dx. \end{align*}\]
Así, podemos definir el trabajo de la siguiente manera.
Si una fuerza variable\(F(x)\) mueve un objeto en una dirección positiva a lo largo del\(x\) eje -de punto\(a\) a punto\(b\), entonces el trabajo realizado en el objeto es
\[W=\int ^b_aF(x)dx. \label{work} \]
Obsérvese que si\(F\) es constante, la integral evalúa a la\(F⋅(b−a)=F⋅d,\) cual es la fórmula que afirmamos al inicio de esta sección.
Ahora veamos el ejemplo específico del trabajo realizado para comprimir o alargar un resorte. Considera un bloque unido a un resorte horizontal. El bloque se mueve hacia adelante y hacia atrás a medida que el resorte se estira y comprime. Si bien en el mundo real tendríamos que dar cuenta de la fuerza de fricción entre el bloque y la superficie sobre la que descansa, aquí ignoramos la fricción y asumimos que el bloque descansa sobre una superficie sin fricción. Cuando la primavera está en su longitud natural (en reposo), se dice que el sistema está en equilibrio. En este estado, el resorte no es alargado ni comprimido, y en esta posición de equilibrio el bloque no se mueve hasta que se introduce alguna fuerza. Orientamos el sistema de tal manera que\(x=0\) corresponda a la posición de equilibrio (Figura\(\PageIndex{4}\)).
Según la ley de Hooke, la fuerza requerida para comprimir o estirar un resorte desde una posición de equilibrio viene dada por\(F(x)=kx\), para alguna constante\(k\). El valor de k depende de las características físicas de la primavera. La constante\(k\) se llama constante de resorte y siempre es positiva. Podemos utilizar esta información para calcular el trabajo realizado para comprimir o alargar un resorte, como se muestra en el siguiente ejemplo.
Supongamos que se necesita una fuerza de\(10\) N (en la dirección negativa) para comprimir un resorte\(0.2\) m desde la posición de equilibrio. ¿Cuánto trabajo se realiza para estirar el muelle\(0.5\) m desde la posición de equilibrio?
Solución
Primero encuentra la constante de primavera,\(k\). Cuando\(x=−0.2\),\(F(x)=−10,\) lo sabemos
\[ \begin{align*} F(x) =kx \\[4pt] −10 =k(−0.2) \\[4pt] k =50 \end{align*}\]
y\(F(x)=50x.\) luego, para calcular el trabajo, integramos la función de fuerza, obteniendo
\[\begin{align*} W = \int ^b_aF(x)dx \\[4pt] =\int ^{0.5}_050 x \,dx \\[4pt] =\left. 25x^2 \right|^{0.5}_0 \\[4pt] =6.25. \end{align*}\]
El trabajo realizado para estirar el resorte es\(6.25\) J.
Supongamos que se necesita una fuerza de\(8\) lb para estirar un resorte\(6\) en. desde la posición de equilibrio. ¿Cuánto trabajo se realiza para estirar el muelle\(1\) ft desde la posición de equilibrio?
- Pista
-
Utilice el proceso del ejemplo anterior. Ten cuidado con las unidades.
- Solución
-
\(8\)ft-lb
Trabajo realizado en Bombeo
Considera el trabajo realizado para bombear agua (o algún otro líquido) fuera de un tanque. Los problemas de bombeo son un poco más complicados que los problemas de resorte porque muchos de los cálculos dependen de la forma y tamaño del tanque. Además, en lugar de preocuparnos por el trabajo realizado para mover una sola masa, estamos viendo el trabajo realizado para mover un volumen de agua, y se necesita más trabajo para mover el agua del fondo del tanque que para mover el agua desde la parte superior del tanque.
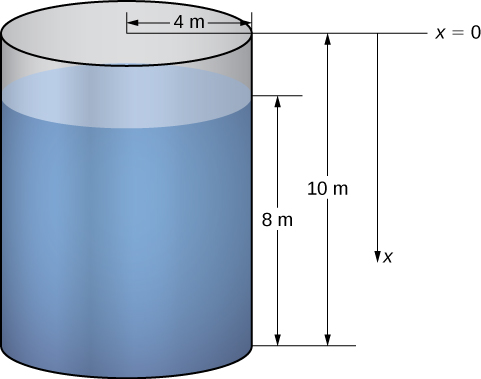
Examinamos el proceso en el contexto de un tanque cilíndrico, luego observamos un par de ejemplos usando tanques de diferentes formas. Supongamos que un tanque cilíndrico de radio\(4\)\(10\) m y altura m se llena a una profundidad de 8 m. ¿Cuánto trabajo se necesita para bombear toda el agua sobre el borde superior del tanque?
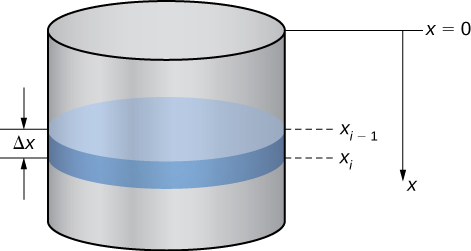
Lo primero que tenemos que hacer es definir un marco de referencia. Dejamos\(x\) representar la distancia vertical debajo de la parte superior del tanque. Es decir, orientamos el\(x\) eje vertical, siendo positivo el origen en la parte superior del tanque y la dirección hacia abajo (Figura\(\PageIndex{5}\)).
Usando este sistema de coordenadas, el agua se extiende desde\(x=2\) hasta\(x=10\). Por lo tanto, particionamos el intervalo\([2,10]\) y observamos el trabajo requerido para levantar cada “capa” individual de agua. Entonces, para\(i=0,1,2,…,n\), deja\(P={x_i}\) ser una partición regular del intervalo\([2,10]\), y para\(i=1,2,…,n\), elige un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). La figura\(\PageIndex{6}\) muestra una capa representativa.
En problemas de bombeo, la fuerza requerida para elevar el agua hasta la parte superior del tanque es la fuerza requerida para superar la gravedad, por lo que es igual al peso del agua. Dado que el peso-densidad del agua es\(9800 \, \text{N/m}^3\), o\(62.4\,\text{lb/ft}^3\), calcular el volumen de cada capa nos da el peso. En este caso, tenemos
\[V=π(4)^2Δx=16πΔx. \nonumber \]
Entonces, la fuerza necesaria para levantar cada capa es
\[F=9800⋅16πΔx=156,800πΔx. \nonumber \]
Tenga en cuenta que este paso se vuelve un poco más difícil si tenemos un tanque no cilíndrico. Nos fijamos en un tanque no cilíndrico en el siguiente ejemplo.
También necesitamos saber la distancia a la que se debe levantar el agua. Basándonos en nuestra elección de sistemas de coordenadas, podemos utilizar\(x^∗_i\) como aproximación de la distancia que la capa debe ser levantada. Entonces el trabajo para levantar la\(i^{\text{th}}\) capa de agua\(W_i\) es aproximadamente
\[W_i≈156,800πx^∗_iΔx. \nonumber \]
Sumando el trabajo para cada capa, vemos que el trabajo aproximado para vaciar el tanque viene dado por
\[ \begin{align*} W =\sum_{i=1}^nW_i \\[4pt] ≈\sum_{i=1}^n156,800πx^∗_iΔx.\end{align*}\]
Esta es una suma de Riemann, así que tomando el límite a medida\(n→∞,\) que obtenemos
\[ \begin{align*} W =\lim_{n→∞}\sum^n_{i=1}156,800πx^∗_iΔx \\[4pt] = 156,800π\int ^{10}_2xdx \\[4pt] =156,800π \left( \dfrac{x^2}{2}\right)\bigg|^{10}_2=7,526,400π≈23,644,883. \end{align*}\]
El trabajo requerido para vaciar el tanque es de aproximadamente 23,650,000 J.
Para problemas de bombeo, los cálculos varían dependiendo de la forma del tanque o contenedor. La siguiente estrategia de resolución de problemas establece un proceso paso a paso para resolver problemas de bombeo.
- Dibuje una imagen del tanque y seleccione un marco de referencia apropiado.
- Calcular el volumen de una capa representativa de agua.
- Multiplique el volumen por el peso-densidad del agua para obtener la fuerza.
- Calcula la distancia a la que se debe levantar la capa de agua.
- Multiplique la fuerza y la distancia para obtener una estimación del trabajo necesario para levantar la capa de agua.
- Suma el trabajo requerido para levantar todas las capas. Esta expresión es una estimación del trabajo requerido para bombear la cantidad deseada de agua, y es en forma de una suma de Riemann.
- Tome el límite como\(n→∞\) y evalúe la integral resultante para obtener el trabajo exacto requerido para bombear la cantidad de agua deseada.
Ahora aplicamos esta estrategia de resolución de problemas en un ejemplo con un tanque no cilíndrico.
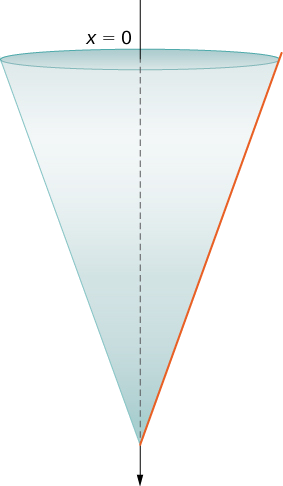
Asumir un tanque en forma de cono invertido, con altura\(12\) ft y radio base\(4\) ft. El tanque está lleno para empezar, y el agua se bombea sobre el borde superior del tanque hasta que la altura del agua que queda en el tanque es\(4\) ft. ¿Cuánto trabajo se requiere para bombear esa cantidad de agua?
Solución
El tanque se representa en la Figura\(\PageIndex{7}\). Como hicimos en el ejemplo con el tanque cilíndrico, orientamos el\(x\) eje vertical, siendo positivo el origen en la parte superior del tanque y la dirección hacia abajo (paso 1).
El tanque comienza lleno y termina con\(4\) pies de agua a la izquierda, así que, según nuestro marco de referencia elegido, necesitamos dividir el intervalo\([0,8]\). Entonces, para\(i=0,1,2,…,n\), deja\(P={x_i}\) ser una partición regular del intervalo\([0,8]\), y para\(i=1,2,…,n\), elige un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). Podemos aproximar el volumen de una capa usando un disco, luego usar triángulos similares para encontrar el radio del disco (Figura\(\PageIndex{8}\)).
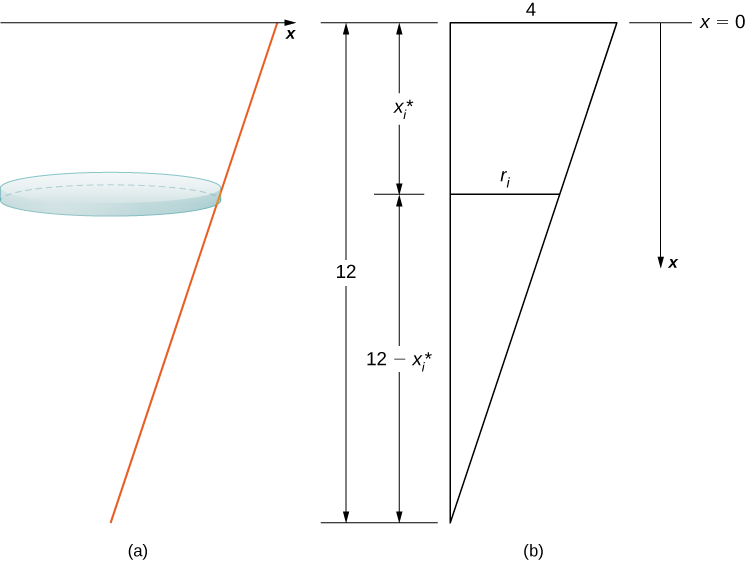
De propiedades de triángulos similares, tenemos
\[ \begin{align*} \dfrac{r_i}{12−x^∗_i} =\dfrac{4}{12} \tag{step 1} =\dfrac{1}{3} \\[4pt] 3r_i =12−x^∗_i \\[4pt] r_i =\dfrac{12−x^∗_i}{3} \\[4pt] =4−\dfrac{x^∗_i}{3}. \end{align*} \]
Entonces el volumen del disco es
\[V_i=π \left(4−\dfrac{x^∗_i}{3}\right)^2\,Δx. \tag{step 2} \]
La densidad de peso del agua es\(62.4\) lb/ft 3, por lo que la fuerza necesaria para levantar cada capa es aproximadamente
\[F_i≈62.4π\left(4−\dfrac{x^∗_i}{3}\right)^2\,Δx \tag{step 3} \]
Según el diagrama, la distancia a la que se debe levantar el agua es de aproximadamente\(x^∗_i\) pies (paso 4), por lo que el trabajo aproximado necesario para levantar la capa es
\[W_i≈62.4πx^∗_i\left(4−\dfrac{x^∗_i}{3}\right)^2\,Δx. \tag{step 5} \]
Sumando el trabajo requerido para levantar todas las capas, obtenemos un valor aproximado del trabajo total:
\[W=\sum_{i=1}^nW_i≈\sum_{i=1}^n62.4πx^∗_i \left(4−\dfrac{x^∗_i}{3}\right)^2\,Δx. \tag{step 6} \]
Tomando el límite a medida\(n→∞,\) que obtenemos
\[ \begin{align*} W =\lim_{n→∞}\sum^n_{i=1}62.4πx^∗_i(4−\dfrac{x^∗_i}{3})^2Δx \\[4pt] = \int ^8_062.4πx \left(4−\dfrac{x}{3}\right)^2dx \\[4pt] = 62.4π\int ^8_0x \left(16−\dfrac{8x}{3}+\dfrac{x^2}{9}\right)\,dx=62.4π\int ^8_0 \left(16x−\dfrac{8x^2}{3}+\dfrac{x^3}{9}\right)\,dx \\[4pt] =62.4π\left[8x^2−\dfrac{8x^3}{9}+\dfrac{x^4}{36}\right]\bigg|^8_0=10,649.6π≈33,456.7. \end{align*}\]
Se necesitan aproximadamente\(33,450\) ft-lb de trabajo para vaciar el tanque al nivel deseado.
Un tanque tiene la forma de un cono invertido, con altura\(10\) ft y radio base 6 ft. El tanque se llena a una profundidad de 8 pies para empezar, y el agua se bombea sobre el borde superior del tanque hasta que 3 pies de agua permanecen en el tanque. ¿Cuánto trabajo se requiere para bombear esa cantidad de agua?
- Pista
-
Utilice el proceso del ejemplo anterior.
- Solución
-
Aproximadamente\(43,255.2\) ft-lb
Fuerza y Presión Hidrostática
En esta última sección, observamos la fuerza y presión ejercidas sobre un objeto sumergido en un líquido. En el sistema inglés, la fuerza se mide en libras. En el sistema métrico, se mide en newtons. La presión es fuerza por unidad de área, por lo que en el sistema inglés tenemos libras por pie cuadrado (o, quizás más comúnmente, libras por pulgada cuadrada, denotadas psi). En el sistema métrico tenemos newtons por metro cuadrado, también llamados pascales.
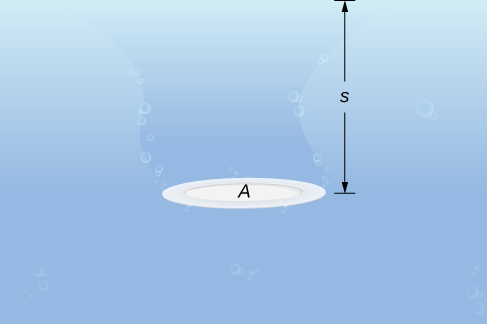
Comencemos con el caso simple de una placa de área\(A\) sumergida horizontalmente en agua a una profundidad s (Figura\(\PageIndex{9}\)). Entonces, la fuerza ejercida sobre la placa es simplemente el peso del agua por encima de ella, que viene dada por\(F=ρAs\), donde\(ρ\) está la densidad de peso del agua (peso por unidad de volumen). Para encontrar la presión hidrostática —es decir, la presión ejercida por el agua sobre un objeto sumergido—dividimos la fuerza por el área. Entonces la presión es\(p=F/A=ρs\).
Por principio de Pascal, la presión a una profundidad dada es la misma en todas las direcciones, por lo que no importa si la placa se sumerge horizontal o verticalmente. Entonces, mientras sepamos la profundidad, conocemos la presión. Podemos aplicar el principio de Pascal para encontrar la fuerza ejercida sobre superficies, como presas, que están orientadas verticalmente. No podemos aplicar la fórmula\(F=ρAs\) directamente, porque la profundidad varía de punto a punto sobre una superficie orientada verticalmente. Entonces, como lo hemos hecho muchas veces antes, formamos una partición, una suma de Riemann, y, en última instancia, una integral definitiva para calcular la fuerza.
Supongamos que una placa delgada está sumergida en agua. Elegimos nuestro marco de referencia de tal manera que el\(x\) eje -eje esté orientado verticalmente, siendo positiva la dirección hacia abajo, y el punto\(x=0\) correspondiente a un punto de referencia lógico. Dejar\(s(x)\) denotar la profundidad en el punto x. Nota que solemos dejar\(x=0\) corresponder a la superficie del agua. En este caso, la profundidad en cualquier punto simplemente viene dada por\(s(x)=x\). Sin embargo, en algunos casos es posible que queramos seleccionar un punto de referencia diferente para\(x=0\), por lo que procedemos con el desarrollo en el caso más general. Por último, vamos a\(w(x)\) denotar el ancho de la placa en el punto\(x\).
Supongamos que el borde superior de la placa está en el punto\(x=a\) y el borde inferior de la placa está en el punto\(x=b\). Entonces, para\(i=0,1,2,…,n\), deja\(P={x_i}\) ser una partición regular del intervalo\([a,b]\), y para\(i=1,2,…,n\), elige un punto arbitrario\(x^∗_i∈[x_{i−1},x_i]\). El tabique divide la placa en varias tiras delgadas y rectangulares (Figura\(\PageIndex{10}\)).
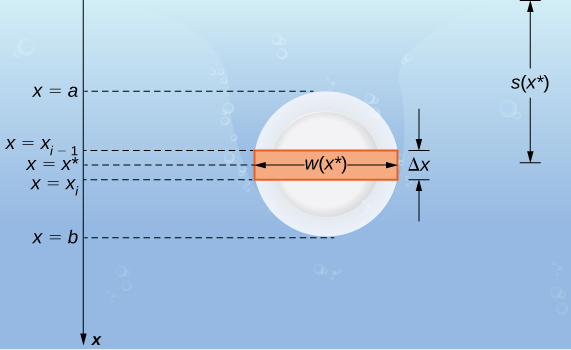
Estimemos ahora la fuerza en una franja representativa. Si la tira es lo suficientemente delgada, podemos tratarla como si estuviera a una profundidad constante,\(s(x^∗_i)\). Entonces tenemos
\[F_i=ρAs=ρ[w(x^∗_i)Δx]s(x^∗_i). \nonumber \]
Sumando las fuerzas, obtenemos una estimación para la fuerza en la placa:
\[F≈\sum_{i=1}^nF_i=\sum_{i=1}^nρ[w(x^∗_i)Δx]s(x^∗_i). \nonumber \]
Se trata de una suma de Riemann, por lo que tomar el límite nos da la fuerza exacta. Obtenemos
\[F=\lim_{n→∞}\sum_{i=1}^nρ[w(x^∗_i)Δx]s(x^∗_i)=\int ^b_aρw(x)s(x)dx. \label{eqHydrostatic} \]
Evaluar esta integral nos da la fuerza sobre la placa. Resumimos esto en la siguiente estrategia de resolución de problemas.
- Haga un boceto de una imagen y seleccione un marco de referencia apropiado. (Tenga en cuenta que si seleccionamos un marco de referencia distinto al utilizado anteriormente, es posible que tengamos que ajustar la Ecuación\ ref {EQHydrostatic} en consecuencia.)
- Determine las funciones de profundidad y anchura,\(s(x)\) y\(w(x).\)
- Determine la densidad de peso de cualquier líquido con el que esté trabajando. La densidad de peso del agua es\(62.4 \,\text{lb/ft}^3\), o\(9800 \,\text{N/m}^3\).
- Usa la ecuación para calcular la fuerza total.
Un canal de agua de 15 pies de largo tiene extremos en forma de triángulos isósceles invertidos, con una base de 8 pies y una altura de 3 pies. Encuentra la fuerza en un extremo del canal si el canal está lleno de agua.
Solución
La figura\(\PageIndex{11}\) muestra el canal y una vista más detallada de un extremo.
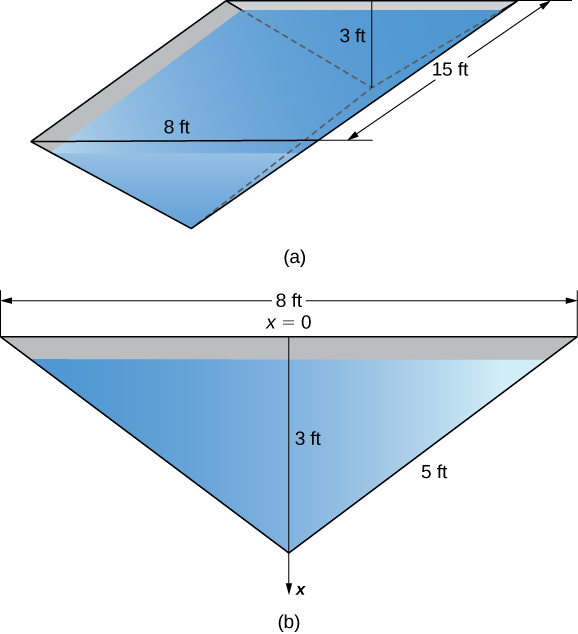
Seleccione un marco de referencia con el\(x\) eje -orientado verticalmente y la dirección hacia abajo siendo positiva. Seleccione la parte superior del canal como el punto correspondiente a\(x=0\) (paso 1). La función de profundidad, entonces, es\(s(x)=x\). Usando triángulos similares, vemos eso\(w(x)=8−(8/3)x\) (paso 2). Ahora, la densidad ponderal del agua es\(62.4 \,\text{lb/ft}^3\) (paso 3), por lo que aplicando la Ecuación\ ref {EQHydrostatic}, obtenemos
\[ \begin{align*} F =\int ^b_aρw(x)s(x)dx \\[4pt] = \int ^3_062.4 \left(8−\dfrac{8}{3}x\right) x \,dx=62.4\int ^3_0 \left(8x−\dfrac{8}{3}x^2 \right)dx \\[4pt] = \left.62.4 \left[4x^2−\dfrac{8}{9}x^3\right]\right|^3_0=748.8. \end{align*}\]
El agua ejerce una fuerza de 748.8 lb en el extremo del canal (paso 4).
Un canal de agua de 12 m de largo tiene extremos en forma de triángulos isósceles invertidos, con base 6 m y altura 4 m. Encuentra la fuerza en un extremo del canal si el canal está lleno de agua.
- Pista
-
Siga la estrategia de resolución de problemas y el proceso del ejemplo anterior.
- Solución
-
\(156,800\)N
Ahora volvemos nuestra atención a la Presa Hoover, mencionada al inicio de este capítulo. La presa real es arqueada, más que plana, pero vamos a hacer algunas suposiciones simplificadoras para ayudarnos con los cálculos. Supongamos que la cara de la Presa Hoover tiene la forma de un trapecio isósceles con una base inferior de 750 pies, una base superior de 1250 pies y una altura de 750 pies (ver la siguiente figura).
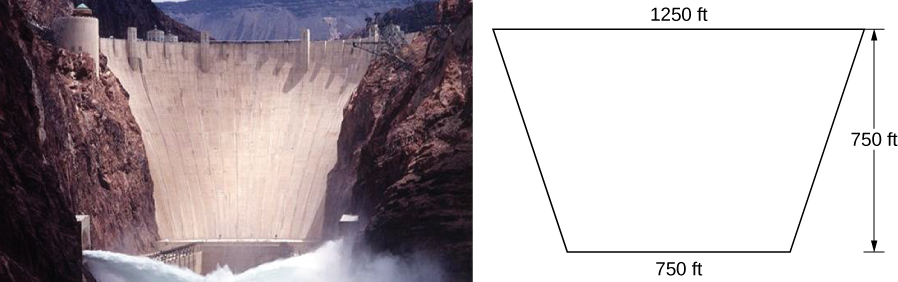
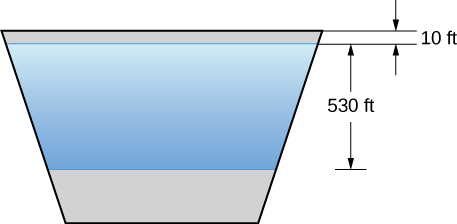
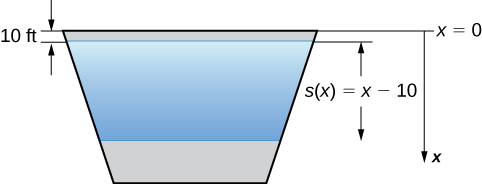
Cuando el embalse está lleno, la profundidad máxima del lago Mead es de aproximadamente 530 pies, y la superficie del lago está a unos 10 pies por debajo de la parte superior de la presa (vea la siguiente figura).
- Encuentra la fuerza en la cara de la presa cuando el embalse está lleno.
- El suroeste de Estados Unidos ha estado experimentando una sequía, y la superficie del lago Mead está a unos 125 pies por debajo de donde estaría si el embalse estuviera lleno. ¿Cuál es la fuerza en la cara de la presa bajo estas circunstancias?
Solución:
a.
Comenzamos por establecer un marco de referencia. Como es habitual, elegimos orientar el\(x\) eje vertical, siendo positiva la dirección hacia abajo. Esta vez, sin embargo, vamos a dejar\(x=0\) representar la parte superior de la presa, más que la superficie del agua. Cuando el embalse está lleno, la superficie del agua se encuentra\(10\) ft por debajo de la parte superior de la presa, así que\(s(x)=x−10\) (vea la siguiente figura).
Para encontrar la función width, volvemos a girar a triángulos similares como se muestra en la siguiente figura.
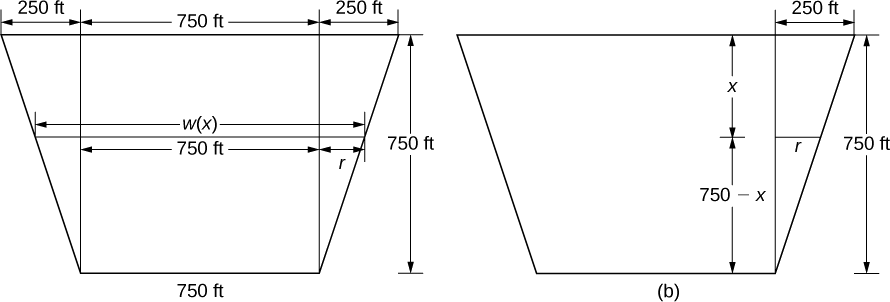
De la figura, vemos eso\(w(x)=750+2r\). Usando propiedades de triángulos similares, obtenemos\(r=250−(1/3)x\). Por lo tanto,
\[w(x)=1250−\dfrac{2}{3}x \tag{step 2} \]
Usando una densidad de peso de\(62.4\) lb/ft 3 (paso 3) y aplicando la Ecuación\ ref {EQHydrostatic}, obtenemos
\ [\ begin {align*} F =\ int^b_a ρw (x) s (x)\, dx\\ [4pt]
=\ int ^ {540} _ {10} 62.4\ izquierda (1250−\ dfrac {2} {3} x\ derecha) (x−10)\, dx\\ [4pt]
=62.4\ int ^ {540} _ {10} −\ dfrac {2} {3} [x^2−1885x+18750]\, dx\\ [4pt]
=−62.4\ izquierda (\ dfrac {2} {3}\ derecha)\ izquierda [\ dfrac {x^3} {3} −\ dfrac {1885x^2} {2} +18750x\ derecha]\ bigg|^ {540} _ {10} ≈8,832,245,000\,\ texto {lb} =4,416,122.5\,\ texto {t}. \ end {alinear*}\]
Observe el cambio de libras a toneladas (\(2000\)lb =\(1\) tonelada) (paso 4). Esto cambia nuestra función de profundidad y nuestros límites de integración.\(s(x)\) Tenemos\(s(x)=x−135\). El límite inferior de integración es 135. El límite superior permanece\(540\). Evaluando la integral, obtenemos
\ [\ begin {align*} F =\ int^b_aρw (x) s (x)\, dx\\ [4pt]
=\ int ^ {540} _ {135} 62.4\ izquierda (1250−\ dfrac {2} {3} x\ derecha) (x−135)\, dx\\ [4pt]
=−62.4 (\ dfrac {2} 3})\ int ^ {540} _ {135} (x−1875) (x−135)\, dx=−62.4\ izquierda (\ dfrac {2} {3}\ derecha)\ int ^ {540} _ {135} (x^2−2010x+253125)\, dx\\ [4pt]
=−62.4\ izquierda (\ dfrac {2} {3}\ derecha)\ izquierda [\ dfrac {x^3} {3} −1005x^2+253125x\ derecha]\ bigg|^ {540} _ {135} ≈5,015,230,000\,\ texto {lb} =2,507,615\,\ texto {t}. \ end {alinear*}\]
Cuando el reservorio está en su nivel promedio, la superficie del agua está a unos 50 pies por debajo de donde estaría si el reservorio estuviera lleno. ¿Cuál es la fuerza en la cara de la presa bajo estas circunstancias?
- Pista
-
Cambiar la función de profundidad,\(s(x),\) y los límites de la integración.
- Solución
-
Aproximadamente 7,164,520,000 lb o 3,582,260 t
Conceptos clave
- Varias aplicaciones físicas de la integral definida son comunes en ingeniería y física.
- Las integrales definidas se pueden utilizar para determinar la masa de un objeto si se conoce su función de densidad.
- El trabajo también se puede calcular integrando una función de fuerza, o al contrarrestar la fuerza de la gravedad, como en un problema de bombeo.
- Las integrales definidas también se pueden usar para calcular la fuerza ejercida sobre un objeto sumergido en un líquido.
Ecuaciones Clave
- Masa de un objeto unidimensional
\( \displaystyle m=\int ^b_aρ(x)dx\)
- Masa de un objeto circular
\(\displaystyle m=\int ^r_02πxρ(x)dx\)
- Trabajo realizado sobre un objeto
\(\displaystyle W=\int ^b_aF(x)dx\)
- Fuerza hidrostática sobre una placa
\(\displaystyle F=\int ^b_aρw(x)s(x)dx\)
Glosario
- función de densidad
- una función de densidad describe cómo se distribuye la masa a lo largo de un objeto; puede ser una densidad lineal, expresada en términos de masa por unidad de longitud; una densidad de área, expresada en términos de masa por unidad de área; o una densidad volumétrica, expresada en términos de masa por unidad de volumen; también se usa peso-densidad para describir peso (en lugar de masa) por unidad de volumen
- Ley de Hooke
- esta ley establece que la fuerza requerida para comprimir (o alargar) un resorte es proporcional a la distancia que el resorte ha sido comprimido (o estirado) del equilibrio; es decir,\(F=kx\), donde\(k\) es una constante
- presión hidrostática
- la presión ejercida por el agua sobre un objeto sumergido
- trabajo
- la cantidad de energía que se necesita para mover un objeto; en física, cuando una fuerza es constante, el trabajo se expresa como producto de la fuerza y la distancia