
10.6: Aviones
- Page ID
- 111835

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Cualquier superficie plana, como una pared, tablero de mesa o pieza rígida de cartón puede considerarse que representa parte de un plano. Considera un trozo de cartón con un punto\(P\) marcado en él. Se puede tomar un clavo y pegarlo en el cartón de\(P\) tal manera que el clavo quede perpendicular al cartón; ver Figura 10.54.
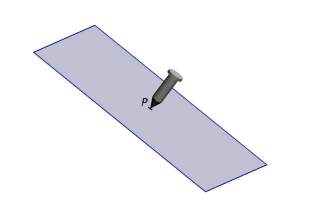
Este clavo proporciona un “mango” para el cartón. Mover el cartón alrededor se mueve\(P\) a diferentes ubicaciones en el espacio. Inclinando el clavo (pero manteniéndolo\(P\) fijo) inclina el cartón. Tanto mover como inclinar el cartón define un plano diferente en el espacio. De hecho, podemos definir un plano por: 1) la ubicación de\(P\) en el espacio, y 2) la dirección de la uña.
La sección anterior mostró que se puede definir una línea dado un punto en la línea y la dirección de la línea (generalmente dada por un vector). Se puede hacer una declaración similar sobre los planos: podemos definir un plano en el espacio dado un punto en el plano y la dirección que el plano “mira” (usando la descripción anterior, la dirección de la uña). Una vez más, la información de dirección será suministrada por un vector, denominado vector normal, que es ortogonal al plano.
¿Qué significa exactamente “ortogonal al plano”? Elija dos puntos cualquiera\(P\) y\(Q\) en el plano, y considere el vector\(\vec{PQ}\). Decimos que un vector\(\vec n\) es ortogonal al plano si\(\vec n\) es perpendicular a\(\vec{PQ}\) para todas las elecciones de\(P\) y\(Q\); es decir, si\(\vec n\cdot \vec{PQ}=0\) para todos\(P\) y\(Q\).
Esto nos da forma de escribir una ecuación que describa el plano. Dejar\(P=(x_0,y_0,z_0)\) ser un punto en el plano y dejar\(\vec n = \langle a,b,c\rangle\) ser un vector normal al plano. Un punto\(Q = (x,y,z)\) se encuentra en el plano definido por\(P\) y\(\vec n\) si, y solo si,\(\vec{PQ}\) es ortogonal a\(\vec n\). Sabiendo\(\vec{PQ} = \langle x-x_0,y-y_0,z-z_0\rangle\), considere:
\ [\ begin {align}
\ vec {PQ}\ cdot\ vec n &= 0\ notag\\
\ langle x-x_0, y-y_0, z-z_0\ rangle\ cdot\ langle a, b, c\ rangle &=0\ notag\\
a (x-x_0) +b (y-y_0) +c (z-z_0) &=0\ label {eq:planes1}\ end {align}\]
Ecuación\ ref {eq:planes1} define una función implícita que describe el plano. Más álgebra produce:
\[ax+by+cz = ax_0+by_0+cz_0. \notag\]
El lado derecho es solo un número, así que lo reemplazamos por\(d\):
\[ax+by+cz = d\label{eq:planes2}.\]
Siempre y cuando\(c\neq 0\), podamos resolver para\(z\):
\[z = \frac1c(d-ax-by).\label{eq:planes3}\]
Ecuación\ ref {eq:planes3} es especialmente útil ya que muchos programas de computadora pueden graficar funciones en esta forma. Las ecuaciones\ ref {eq:planes1} y\ ref {eq:planes2} tienen nombres específicos, dados a continuación.
Definición 63 Ecuaciones de un Plano en Formas Estándar y General
\[a(x-x_0)+b(y-y_0)+c(z-z_0) =0;\]
la forma general de la ecuación es
\[ax+by+cz = d.\]
Una clave para recordar a lo largo de esta sección es esta: para encontrar la ecuación de un plano, necesitamos un punto y un vector normal. Daremos varios ejemplos de encontrar la ecuación de un plano, y en cada uno se dan diferentes tipos de información. En cada caso, necesitamos usar la información dada para encontrar un punto en el plano y un vector normal.
Ejemplo\(\PageIndex{1}\): Finding the equation of a plane.
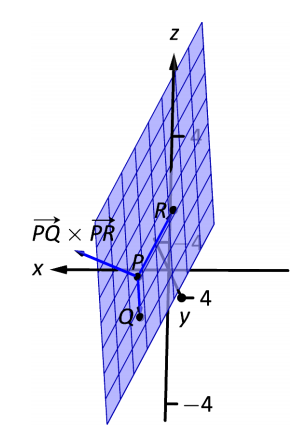
Escribe la ecuación del plano que pasa por los puntos\(P=(1,1,0)\),\(Q = (1,2,-1)\) y\(R = (0,1,2)\) en forma estándar.
Solución
Necesitamos un vector\(\vec n\) que sea ortogonal al plano. Ya que\(P\),\(Q\) y\(R\) están en el plano, también lo son los vectores\(\vec{PQ}\) y\(\vec{PR}\);\(\vec{PQ}\times\vec{PR}\) es ortogonal a\(\vec{PQ}\) y\(\vec{PR}\) y por lo tanto el plano mismo.
Es sencillo de calcular\(\vec n = \vec{PQ}\times\vec{PR} = \langle 2,1,1\rangle\). Podemos usar cualquier punto que queramos en el avión (cualquiera de\(P\),\(Q\) o\(R\) haremos) y elegimos arbitrariamente\(P\). Siguiendo la Definición 63, la ecuación del plano en forma estándar es
\[2(x-1) + (y-1)+z = 0.\]
El plano se esboza en la Figura 10.55.
Acabamos de demostrar el hecho de que tres puntos no colineales cualesquiera definen un plano. (Es por ello que un taburete de tres patas no “rocía”; son tres pies siempre se encuentran en un avión. Un taburete de cuatro patas se mecerá a menos que los cuatro pies se encuentren en el mismo plano. )\\
Ejemplo\(\PageIndex{2}\): Finding the equation of a plane.
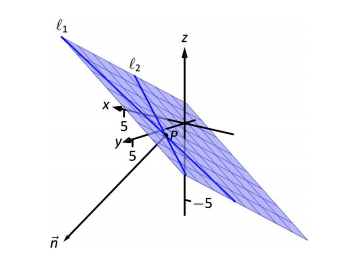
Verificar que las líneas\(\ell_1\) y\(\ell_2\), cuyas ecuaciones paramétricas se dan a continuación, se cruzan, luego dan la ecuación del plano que contiene estas dos líneas en forma general.
\ [\ ell_1:\ begin {array} {ccc} x&=&-5+2s\ y&=&1+s\\ z&=&-4+2s\ end {array}\ qquad\ qquad
\ ell_2:\ begin {array} {ccc} x &=& 2+3t\ y&=&1-2t\\ z&=&1+t\ end {array}\]
Solución
Las líneas claramente no son paralelas. Si no se cruzan, están sesgados, es decir, no hay un plano que los contenga a ambos. Si sí se cruzan, existe tal avión.
Para encontrar su punto de intersección, establecemos\(z\) las ecuaciones\(x\),\(y\) y iguales entre sí y resolvemos para\(s\) y\(t\):
\[\begin{array}{ccc} -5+2s &=&2+3t \\ 1+s &=& 1-2t \\ -4+2s &=& 1+t \end{array}\quad \Rightarrow \quad s=2,\quad t=-1.\]
Cuando\(s=2\) y\(t=-1\), las líneas se cruzan en el punto\(P= (-1,3,0)\).
Dejar\(\vec d_1 = \langle 2,1,2\rangle\) y\(\vec d_2=\langle 3,-2,1\rangle\) ser las direcciones de líneas\(\ell_1\) y\(\ell_2\), respectivamente. Un vector normal al plano que contiene estas las dos líneas también será ortogonal a\(\vec d_1\) y\(\vec d_2\). Así encontramos un vector normal\(\vec n\) por computación\(\vec n = \vec d_1 \times \vec d_2= \langle 5,4-7\rangle\).
Podemos escoger cualquier punto del plano con el que escribir nuestra ecuación; cada línea nos da infinitas opciones de puntos. Nosotros elegimos\(P\), el punto de intersección. Seguimos la Definición 63 para escribir la ecuación del plano en forma general:
\ [\ begin {alinear*}
5 (x+1) +4 (y-3) -7z &= 0\\
5x + 5 + 4y-12 -7z &= 0\\
5x+4y-7z &= 7.
\ end {alinear*}\]
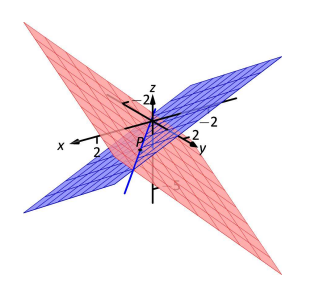
La ecuación del plano en forma general es\(5x+4y-7z=7\); se esboza en la Figura 10.56.
Ejemplo\(\PageIndex{3}\): Finding the equation of a plane
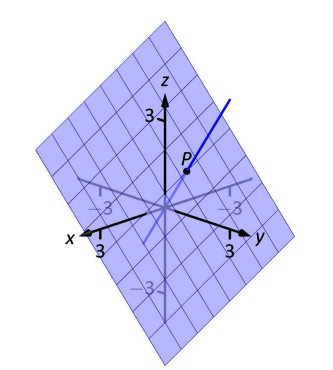
Dar la ecuación, en forma estándar, del plano que pasa por el punto\(P=(-1,0,1)\) y es ortogonal a la línea con ecuación vectorial\(\vec \ell(t) = \langle -1,0,1\rangle + t\langle 1,2,2\rangle\).
Solución
Como el plano va a ser ortogonal a la línea, el plano debe ser ortogonal a la dirección de la línea dada por\(\vec d = \langle 1,2,2\rangle\). Usamos esto como nuestro vector normal. Así, la ecuación del plano, en forma estándar, es
\[(x+1) +2y+2(z-1)=0.\]
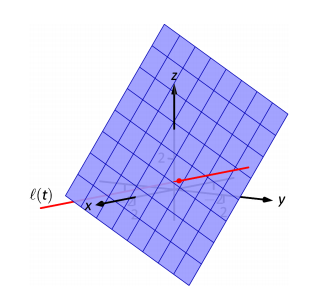
La línea y el plano se esbozan en la Figura 10.57.
Ejemplo\(\PageIndex{4}\): Finding the intersection of two planes
Dar las ecuaciones paramétricas de la línea que es la intersección de los planos\(p_1\) y\(p_2\), donde:
\ [\ begin {alinear*}
p_1&: x- (y-2) + (z-1) =0\\
p_2&: -2 (x-2) + (y+1) + (z-3) =0
\ end {align*}\]
Solución
Para encontrar una ecuación de una línea, necesitamos un punto en la línea y la dirección de la línea.
Podemos encontrar un punto en la línea resolviendo cada ecuación de los planos para\(z\):
\ [\ begin {align*}
p_1&: z = -x+y-1\\
p_2&: z = 2x-y-2
\ end {align*}\]
Ahora podemos establecer estas dos ecuaciones iguales entre sí (es decir, estamos encontrando valores de\(x\) y\(y\) donde los planos tienen el mismo\(z\) valor):
\ [\ begin {alinear*}
-x+y-1 &= 2x-y-2\\
2y &= 3x-1\
y &=\ frac12 (3x-1)
\ end {align*}\]
Podemos elegir cualquier valor para\(x\); nosotros elegimos\(x=1\). Esto determina eso\(y=1\). Ahora podemos usar las ecuaciones de cualquiera de los planos para encontrar\(z\): cuándo\(x=1\) y\(y=1\),\(z=-1\) en ambos planos. Hemos encontrado un punto\(P\) en la línea:\(P= (1,1,-1)\).
Ahora necesitamos la dirección de la línea. Dado que la línea se encuentra en cada plano, su dirección es ortogonal a un vector normal para cada plano. Considerando las ecuaciones para\(p_1\) y\(p_2\), podemos determinar rápidamente sus vectores normales. Para\(p_1\)\(\vec n_1 = \langle 1,-1,1\rangle\) y para\(p_2\),\(\vec n_2 = \langle -2,1,1\rangle.\) Una dirección ortogonal a ambas direcciones es su producto cruzado:\(\vec d = \vec n_1\times \vec n_2 = \langle -2,-3,-1\rangle.\)
Las ecuaciones paramétricas de la línea a través\(P=(1,1,-1)\) en la dirección de\(d=\langle -2,-3,-1\rangle\) es:
\[\ell: \quad x= -2t+1\quad y = -3t+1\quad z=-t-1.\]
Los planos y la línea están graficados en la Figura 10:58.
Ejemplo\(\PageIndex{5}\): Finding the intersection of a plane and a line
Encuentra el punto de intersección, en su caso, de la línea\(\ell(t) = \langle 3,-3,-1\rangle +t\langle -1,2,1\rangle\) y el plano con ecuación en forma general\(2x+y+z=4\).
Solución
La ecuación del plano muestra que el vector\(\vec n = \langle 2,1,1\rangle\) es un vector normal al plano, y la ecuación de la línea muestra que la línea se mueve paralela a\(\vec d = \langle -1,2,1\rangle\). Como estos no son ortogonales, sabemos que hay un punto de intersección. (Si hubiera ortogonales, significaría que el plano y la línea eran paralelos entre sí, o nunca se cruzaban o la línea estaba en el plano mismo).
Para encontrar el punto de intersección, necesitamos encontrar un\(t\) valor tal que\(\ell(t)\) satisfaga la ecuación del plano. Reescribir la ecuación de la línea con ecuaciones paramétricas ayudará a:
\[\ell(t) = \left\{\begin{aligned} x&= 3-t\\ y&=-3+2t\\ z&= -1+t \end{aligned}\right..\]
Sustituir\(x\),\(y\) y\(z\) en la ecuación del plano con las expresiones que contienen\(t\) encontradas en la ecuación de la línea nos permite determinar un\(t\) valor que indica el punto de intersección:
\ [\ begin {alinear*}
2x+y+z &=4\\
2 (3-t) + (-3+2t) + (-1+t) &= 4\\
t&=2.
\ end {alinear*}\]
Cuando\(t=2\), el punto en la línea satisface la ecuación del plano; ese punto es\(\ell(2) = \langle 1,1,1\rangle\). Así, el punto\((1,1,1)\) es el punto de intersección entre el plano y la línea, ilustrado en la Figura 10.59.
Distancias
Así como fue útil encontrar distancias entre puntos y líneas en la sección anterior, también suele ser necesario encontrar la distancia de un punto a un plano.
Considere la Figura 10.60, donde\(\vec n\) se esboza un plano con vector normal que contiene un punto\(P\) y se da un punto\(Q\), no en el plano. Medimos la distancia desde\(Q\) el plano midiendo la longitud de la proyección de\(\vec{PQ}\) sobre\(\vec n\). Es decir, queremos:
\[\norm{\text{proj}_{\,\vec n}\,{\vec{PQ}}} = \norm{\frac{\vec n\cdot \vec{PQ}}{\norm n^2}\vec n} = \frac{|\vec n\cdot \vec{PQ}|}{\norm n}\label{eq:plane_dist}\]
La ecuación\ ref {eq:plane_dist} es importante ya que hace más que solo dar la distancia entre un punto y un plano. Veremos cómo nos permite encontrar varias otras distancias también: la distancia entre planos paralelos y la distancia desde una línea y un plano. Debido a que la Ecuación\ ref {eq:plane_dist} es importante, la reafirmamos como una Idea Clave.
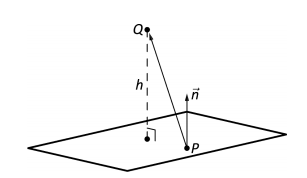
Figura 10.60: Ilustrando la búsqueda de la distancia de un punto a un plano.
KEY IDEA 51 Distancia de un punto a un plano
Deje que\(\vec n\) se dé un plano con vector normal, y deje\(Q\) ser un punto. La distancia\(h\) desde\(Q\) el avión es
\[h = \frac{|\vec n\cdot \vec{PQ}|}{\norm n},\]
donde\(P\) hay algún punto en el avión.
Ejemplo\(\PageIndex{6}\): Distance between a point and a plane
Encuentra la distancia entre el punto\(Q = (2,1,4)\) y el plano con ecuación\(2x-5y+6z=9\).
Solución
Usando la ecuación del plano, encontramos el vector normal\(\vec n = \langle 2,-5,6\rangle\). Para encontrar un punto en el plano, podemos dejar\(x\) y\(y\) ser cualquier cosa que escojamos, luego dejar\(z\) ser lo que satisfaga la ecuación. Dejar\(x\) y\(y\) ser 0 parece sencillo; esto hace\(z = 1.5\). Así dejamos\(P = \langle 0,0,1.5\rangle\), y\(\vec{PQ} = \langle 2,1,2.5\rangle.\)
La distancia\(h\) desde\(Q\) el avión viene dada por Key Idea 51:
\ [\ begin {align*}
h &=\ frac {|\ vec n\ cdot\ vec {PQ} |} {\ norm n}\\
&=\ frac {|\ langle 2, -5,6\ rangle\ cdot\ langle 2,1,2.5\ rangle|} {\ norm {\ langle 2, -5,6\ rangle}}\
&= frac\ ac {|14|} {\ sqrt {65}}\\
&\ aprox 1.74.
\ end {alinear*}\]
Podemos usar Key Idea 51 para encontrar otras distancias. Dados dos planos paralelos, podemos encontrar la distancia entre estos planos dejando\(P\) ser un punto en un plano y\(Q\) un punto en el otro. Si\(\ell\) es una línea paralela a un plano, podemos usar la Idea Clave para encontrar la distancia entre ellos también: nuevamente, dejar\(P\) ser un punto en el plano y dejar\(Q\) ser cualquier punto de la línea. (También se puede usar Key Idea 50.) La sección Ejercicio contiene problemas de este tipo.
Estas dos últimas secciones no han explorado líneas y planos en el espacio como ejercicio de curiosidad matemática. Sin embargo, hay muchas, muchas aplicaciones de estos conceptos fundamentales. Las formas complejas se pueden modelar (o aproximar) usando planos. Por ejemplo, parte del exterior de una aeronave puede tener una forma compleja, pero suave, y los ingenieros querrán saber cómo fluye el aire a través de esta pieza, así como cómo podría acumularse el calor debido a la fricción del aire. Muchas ecuaciones que ayudan a determinar el flujo de aire y la disipación de calor son difíciles de aplicar a superficies arbitrarias, pero simples de aplicar a los planos. Al aproximar una superficie con millones de planos pequeños, uno puede modelar más fácilmente el comportamiento necesario.