
10.5: Líneas
- Page ID
- 111834

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Para encontrar la ecuación de una línea en el\(y\) plano\(x\) -, necesitamos dos piezas de información: un punto y la pendiente. La pendiente transmite información de dirección. Como las líneas verticales tienen una pendiente indefinida, la siguiente declaración es más precisa:
Para definir una línea, se necesita un punto en la línea y la dirección de la línea.
Esto es cierto para las líneas en el espacio.
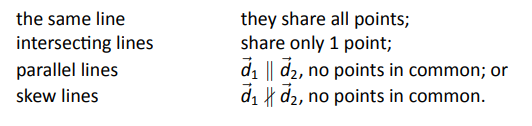
Dejar\(P\) ser un punto en el espacio, dejar\(\vec p\) ser el vector con punto inicial en el origen y punto terminal en\(P\) (es decir,\(\vec p\) “puntos” a\(P\)), y dejar\(\vec d\) ser un vector. Considerar los puntos en la línea a través\(P\) en la dirección de\(\vec d\).
Claramente un punto en la línea es\(P\); podemos decir que el vector\(\vec p\) se encuentra en este punto de la línea. Para encontrar otro punto en la línea, podemos comenzar en\(\vec p\) y movernos en una dirección paralela a\(\vec d\). Por ejemplo, comenzar en\(\vec p\) y viajar una longitud de\(\vec d\) lugares uno en otro punto de la línea. Considere la Figura 10.47 donde se indican ciertos puntos a lo largo de la línea.
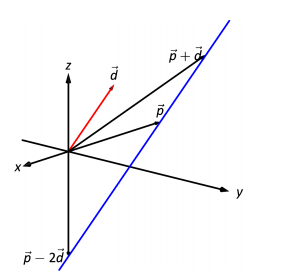
La figura ilustra cómo cada punto de la línea se puede obtener comenzando con\(\vec p\) y moviendo una cierta distancia en la dirección de\(\vec d\). Es decir, podemos definir la línea en función de\(t\):
\[\vec\ell(t) = \vec p + t \vec d.\label{eq:lines1}\]
En muchos sentidos, este no es un concepto nuevo. Compara la ecuación\ ref {eq:lines1} con la ecuación familiar\(y=mx+b\) "" de una línea:
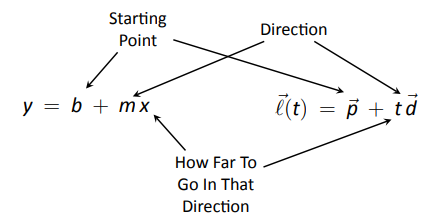
Las ecuaciones exhiben la misma estructura: dan un punto de partida, definen una dirección y establecen qué tan lejos en esa dirección viajar.
La ecuación\ ref {eq:lines1} es un ejemplo de una función de valor vectorial; la entrada de la función es un número real y la salida es un vector. En el próximo capítulo cubriremos ampliamente las funciones con valores vectoriales.
Hay otras formas de representar una línea. Dejar\(\vec p = \langle x_0,y_0,z_0\rangle\) y dejar\(\vec d = \langle a,b,c\rangle\). Entonces la ecuación de la línea a través\(\vec p\) en la dirección de\(\vec d\) es:
\ [\ begin {align*}
\ vec\ ell (t) &=\ vec p + t\ vec d\\
&=\ langle x_0, y_0, z_0\ rangle + t\ langle a, b, c\ rangle\\
&=\ langle x_0 + at, y_0+bt, z_0+ct\ rangle.
\ end {alinear*}\]
La última línea establece que los\(x\) valores de la línea están dados por\(x=x_0+at\), los\(y\) valores están dados por\(y = y_0+bt\), y los\(z\) valores están dados por\(z = z_0 + ct\). Estas tres ecuaciones, tomadas en conjunto, son las ecuaciones paramétricas de la línea a través\(\vec p\) en la dirección de\(\vec d\).
Finalmente, cada una de las ecuaciones para\(x\),\(y\) y\(z\) anteriores contienen la variable\(t\). Podemos resolver para\(t\) en cada ecuación:
\ [\ begin {align*}
x = x_0+at\ quad&\ Rightarrow\ quad t=\ frac {x-x_0} {a},\\
y=y_0+bt\ quad&\ Rightarrow\ quad t =\ frac {y-y_0} {b},\\
z = z_0+ct\ quad&\ Rightarrow\ quad t =\ frac {frac z-z_0} {c},\\
\ final {alinear*}\]
asumiendo\(a,b,c\neq 0\).
Dado que\(t\) es igual a cada expresión de la derecha, podemos establecerlas iguales entre sí, formando las ecuaciones simétricas de la línea a través\(\vec p\) en la dirección de\(\vec d\):
\[\frac{x-x_0}{a} = \frac{y-y_0}{b}=\frac{z-z_0}{c}.\]
Cada representación tiene sus propias ventajas, dependiendo del contexto. Resumimos estas tres formas en la siguiente definición, luego damos ejemplos de su uso.
Definición 62 Ecuaciones de líneas en el espacio
Considere la línea en el espacio que atraviesa\(\vec p = \langle x_0,y_0,z_0\rangle\) en la dirección de\(\vec d = \langle a,b,c\rangle.\)
- La ecuación vectorial de la línea es\[\vec \ell(t) = \vec p+t\vec d.\]
- Las ecuaciones paramétricas de la línea son
\[x = x_0+at, \quad y=y_0+bt, \quad z = z_0+ct .\] - Las ecuaciones simétricas de la línea son
\[\frac{x-x_0}{a} = \frac{y-y_0}{b}=\frac{z-z_0}{c}.\]
Ejemplo\(\PageIndex{1}\): Finding the equation of a line
Dar las tres ecuaciones, como se da en la Definición 62, de la línea a través\(P = (2,3,1)\) en la dirección de\(\vec d = \langle -1,1,2\rangle\). ¿El punto\(Q=(-1,6,6)\) radica en esta línea?
Solución
Identificamos el punto\(P=(2,3,1)\) con el vector\(\vec p =\langle 2,3,1\rangle\). Siguiendo la definición, tenemos
- la ecuación vectorial de la línea es\(\vec\ell(t) = \langle 2,3,1\rangle + t\langle -1,1,2\rangle\);
- las ecuaciones paramétricas de la línea son
\[x = 2-t,\quad y = 3+t,\quad z = 1+2t; \text{ and}\] - las ecuaciones simétricas de la línea son
\[\frac{x-2}{-1}=\frac{y-3}{1} = \frac{z-1}{2}.\]
Las dos primeras ecuaciones de la línea son útiles cuando se da un\(t\) valor: uno puede encontrar inmediatamente el punto correspondiente en la línea. Estas formas son buenas a la hora de calcular con una computadora; la mayoría de los programas de software manejan fácilmente ecuaciones en estos formatos. (Por ejemplo, para hacer la Figura 10.48, se le dio la entrada a cierto programa gráfico\(\texttt{(2-x,3+x,1+2*x)}\). Este programa en particular requiere que la variable sea siempre "\(x\)" en lugar de "\(t\)“).
¿El punto\(Q = (-1,6,6)\) está en la línea? El gráfico de la Figura 10.48 deja claro que no lo hace. Podemos responder a esta pregunta sin que la gráfica utilice ninguna de las tres formas de ecuación. De las tres, las ecuaciones simétricas son probablemente las más adecuadas para esta tarea. Simplemente enchufar los valores de\(x\),\(y\) y\(z\) y ver si se mantiene la igualdad:
\[ \frac{-1-2}{-1} \stackrel{?}{=} \frac{6-3}{1} \stackrel{?}{=} \frac{6-1}{2} \quad \Rightarrow \quad 3=3\neq2.5.\]
Vemos que\(Q\) no se encuentra en la línea ya que no satisfizo las ecuaciones simétricas.
Ejemplo\(\PageIndex{2}\): Finding the equation of a line through two points
Encuentra las ecuaciones paramétricas de la línea a través de los puntos\(P=(2,-1,2)\) y\(Q = (1,3,-1)\).
Solución
Recordemos la afirmación hecha al inicio de esta sección: para encontrar la ecuación de una línea, necesitamos un punto y una dirección. Tenemos dos puntos; cualquiera será suficiente. La dirección de la línea se puede encontrar por el vector con punto inicial\(P\) y punto terminal\(Q\):\(\vec{PQ} = \langle -1,4,-3\rangle\).
Las ecuaciones paramétricas de la línea\(\ell\) a través\(P\) en la dirección de\(\vec{PQ}\) son:
\[\ell: \quad x= 2-t\quad y=-1+4t \quad z=2-3t.\]
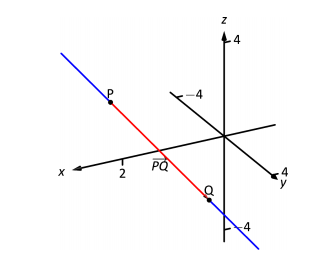
Una gráfica de los puntos y la línea se dan en la Figura 10.49. Observe cómo en la parametrización dada de la línea,\(t=0\) corresponde al punto\(P\), y\(t=1\) corresponde al punto\(Q\). Esto se relaciona con la comprensión de la ecuación vectorial de una línea descrita en la Figura 10.46. Las ecuaciones paramétricas “comienzan” en el punto\(P\), y\(t\) determinan qué tan lejos en la dirección de\(\vec{PQ}\) viajar. Cuando\(t=0\), viajamos 0 longitudes de\(\vec{PQ}\); cuando\(t=1\), viajamos una longitud de\(\vec{PQ}\), resultando en el punto\(Q\).
Líneas paralelas, intersecantes y oblicuas
En el plano, dos líneas distintas pueden ser paralelas o se cruzarán exactamente en un punto. En el espacio, dadas las ecuaciones de dos líneas, a veces puede ser difícil saber si las líneas son distintas o no (es decir, la misma línea se puede representar de diferentes maneras). Dadas las líneas\(\vec\ell_1(t) = \vec p_1 + t\vec d_1\) y\(\vec \ell_2(t) = \vec p_2+t\vec d_2\), tenemos cuatro posibilidades:\(\vec \ell_1\) y\(\vec \ell_2\) estamos
Los siguientes dos ejemplos investigan estas posibilidades.
Ejemplo\(\PageIndex{3}\): Comparing lines
Considerar líneas\(\ell_1\) y\(\ell_2\), dadas en forma de ecuación paramétrica:
\[\ell_1: \begin{array}{ccc} x&=&1+3t \\ y&=&2-t\\z&=&t\end{array}\qquad\qquad \ell_2:\begin{array}{ccc} x&=&-2+4s\\y&=&3+s\\z&=&5+2s.\end{array}\]
Determine si\(\ell_1\) y\(\ell_2\) son la misma línea, se cruzan, son paralelas o sesgadas.
Solución
Empezamos por mirar las direcciones de cada línea. La línea\(\ell_1\) tiene la dirección dada por\(\vec d_1=\langle 3,-1,1\rangle\) y la línea\(\ell_2\) tiene la dirección dada por\(\vec d_2 = \langle 4,1,2\rangle\). Debe quedar claro que\(\vec d_1\) y no\(\vec d_2\) son paralelos, de ahí\(\ell_1\) y no\(\ell_2\) son la misma línea, ni son paralelos. La Figura 10.50 verifica este hecho (donde se identifican los puntos y direcciones que indican las ecuaciones de cada línea).
A continuación comprobamos para ver si se cruzan (si no lo hacen, son líneas sesgadas). Para encontrar si se cruzan, buscamos\(t\) y\(s\) valores tales que los respectivos\(x\),\(y\) y\(z\) los valores sean los mismos. Es decir, queremos\(s\) y\(t\) tal que:
\ [\ begin {array} {ccc}
1+3t &=&-2+4s\\
2-t&=&3+s\\
t&=&5+2s. \ end {array}\]
Se trata de un sistema relativamente simple de ecuaciones lineales. Dado que la última ecuación ya está resuelta para\(t\), sustituya ese valor de\(t\) en la ecuación anterior:
\[2-(5+2s) = 3+s \quad \Rightarrow \quad s=-2,\ t=1.\]
Una clave para recordar es que tenemos tres ecuaciones; necesitamos verificar si\(s=-2,\ t=1\) satisface también la primera ecuación:
\[1+3(1) \neq -2+4(-2).\]
No lo hace. Por lo tanto, concluimos que las líneas\(\ell_1\) y\(\ell_2\) están sesgadas.
Ejemplo\(\PageIndex{4}\): Comparing lines
Considerar líneas\(\ell_1\) y\(\ell_2\), dadas en forma de ecuación paramétrica:
\[\ell_1: \begin{array}{ccc} x&=&-0.7+1.6t \\ y&=&4.2+2.72t\\z&=&2.3-3.36t\end{array}\qquad\qquad \ell_2:\begin{array}{ccc} x&=&2.8-2.9s\\y&=&10.15-4.93s\\z&=&-5.05+6.09s.\end{array}\]
Determine si\(\ell_1\) y\(\ell_2\) son la misma línea, se cruzan, son paralelos o sesgados.
Solución Obviamente
es muy difícil simplemente mirar estas ecuaciones y discernir cualquier cosa. Esto se hace intencionalmente. En el “mundo real”, la mayoría de las ecuaciones que se utilizan no tienen buenos coeficientes enteros. Más bien, hay muchos dígitos después del decimal y las ecuaciones pueden parecer “desordenadas”.
De nuevo empezamos por decidir si cada línea tiene o no la misma dirección. La dirección de\(\ell_1\) está dada por\(\vec d_1 = \langle 1.6,2.72,-3.36\rangle\) y la dirección de la\(\ell_2\) viene dada por\(\vec d_2 = \langle -2.9,-4.93,6.09\rangle\). Cuando no está claro a través de la observación si dos vectores son paralelos o no, la forma estándar de determinarlo es comparando sus respectivos vectores unitarios. Usando una calculadora, encontramos:
\ [\ begin {align*}
\ vec u_1 &=\ frac {\ vec d_1} {\ norm {\ vec d_1}} =\ langle 0.3471,0.5901, -0.7289\ rangle\
\ vec u_2 &=\ frac {\ vec d_2} {\ norm {\ vec d_2}} =\ langle -0.3471, -0.571, -0.571 901,0.7289\ rangle.
\ end {alinear*}\]
Los dos vectores parecen ser paralelos (al menos, sus componentes son iguales a 4 decimales). En la mayoría de las situaciones, bastaría con concluir que las líneas son al menos paralelas, si no las mismas. Una forma de estar seguro es reescribir\(\vec d_1\) y\(\vec d_2\) en términos de fracciones, no decimales. Tenemos
\[\vec d_1 =\langle \frac{16}{10},\frac{272}{100},-\frac{336}{100}\rangle \qquad \vec d_2 = \langle -\frac{29}{10},-\frac{493}{100},\frac{609}{100}\rangle.\]
Entonces se pueden encontrar las magnitudes de cada vector en términos de fracciones, luego calcular los vectores unitarios de la misma manera. Después de mucha aritmética manual (o después de usar brevemente un sistema de álgebra por computadora), uno encuentra que
\[\vec u_1 = \langle \sqrt{\frac{10}{83}},\frac{17}{\sqrt{830}},-\frac{21}{\sqrt{830}}\rangle \qquad \vec u_2 = \langle -\sqrt{\frac{10}{83}},-\frac{17}{\sqrt{830}},\frac{21}{\sqrt{830}}\rangle.\]
Ahora podemos decir sin equívocos que estas líneas son paralelas.
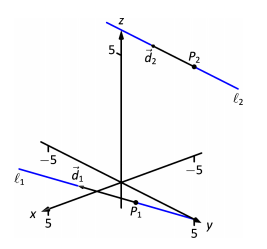
¿Son la misma línea? Las ecuaciones paramétricas para una línea describen un punto que se encuentra en la línea, por lo que sabemos que el punto\(P_1 = (-0.7,4.2,2.3)\) se encuentra en\(\ell_1\). Para determinar si este punto también se encuentra en\(\ell_2\), conecte el\(x\),\(y\) y\(z\) los valores de\(P_1\) en las ecuaciones simétricas para\(\ell_2\):
\[\frac{(-0.7)-2.8}{-2.9} \stackrel{?}{=} \frac{(4.2)-10.15}{-4.93} \stackrel{?}{=} \frac{(2.3)-(-5.05)}{6.09} \quad \Rightarrow \quad 1.2069=1.2069=1.2069.\]
El punto\(P_1\) se encuentra en ambas líneas, por lo que concluimos que son la misma línea, solo parametrizadas de manera diferente. La Figura 10.51 grafica esta línea junto con los puntos y vectores descritos por las ecuaciones paramétricas. Observe cómo\(\vec d_1\) y\(\vec d_2\) son paralelos, aunque apuntan en direcciones opuestas (como lo indican sus vectores unitarios anteriores).
Distancias
Dado un punto\(Q\) y una línea\(\vec\ell(t) = \vec p+t\vec d\) en el espacio, muchas veces es útil conocer la distancia del punto a la línea. (Aquí usamos la definición estándar de “distancia”, es decir, la longitud del segmento de línea más corto desde el punto hasta la línea). Identificándose\(\vec p\) con el punto\(P\), la Figura 10.52 ayudará a establecer un método general de cálculo de esta distancia\(h\).
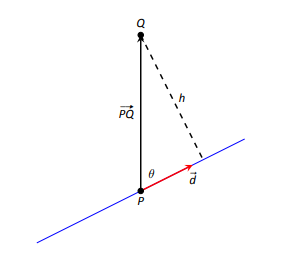
De la trigonometría, sabemos\(h = \norm{\vec{PQ}}\sin\theta\). Tenemos una identidad similar que involucra el producto cruzado:\(\norm{\vec{PQ}\times \vec d} = \norm{\vec{PQ}}\, \norm{d}\sin\theta.\) Dividir ambos lados de esta última ecuación por\(\norm{d}\) para obtener\(h\):
\[h = \frac{\norm{\vec{PQ}\times \vec d}}{\norm{d}}.\label{eq:lines2}\]
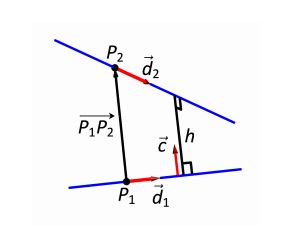
También es útil para determinar la distancia entre líneas, que definimos como la longitud del segmento de línea más corto que conecta las dos líneas (un argumento de la geometría muestra que estos segmentos de línea son perpendiculares a ambas líneas). Dejar líneas\(\vec\ell_1(t) = \vec p_1 + t\vec d_1\) y\(\vec\ell_2(t) = \vec p_2 + t\vec d_2\) ser dadas, como se muestra en la Figura 10.53. Para encontrar la dirección ortogonal a ambos\(\vec d_1\) y\(\vec d_2\), tomamos el producto cruzado:\(\vec c = \vec d_1\times \vec d_2\). La magnitud de la proyección ortogonal de\(\vec{P_1P_2}\) onto\(\vec c\) es la distancia\(h\) que buscamos:
\ [\ begin {align*}
h&=\ norm {\ text {proj}\, _ {\ vec c}\,\ vec {P_1P_2}}\\
&=\ norm {\ frac {\ vec {P_1P_2}\ cdot\ vec c} {\ vec c} {\ vec c\ cdot\ vec c}\ vec c}\\
&= frac {|\ vec {P_1P_2}\ cdot\ vec c|} {\ norma c^2}\ norma c\\
&=\ frac {|\ vec {P_1P_2}\ cdot\ vec c|} {\ norma c}.
\ end {alinear*}\]
Un problema en la sección Ejercicio es mostrar que esta distancia es 0 cuando las líneas se cruzan. Tenga en cuenta el uso del Producto Triple Escalar:\(\vec{P_1P_2}\cdot c = \vec{P_1P_2}\cdot (\vec d_1\times \vec d_2).\)
La siguiente Idea Clave reafirma estas dos fórmulas de distancia.
IDEA CLAVE A 50 DISTANCIA A
- Dejar\(P\) ser un punto en una línea\(\ell\) que es paralela a\(\vec d\). La distancia\(h\) de un punto\(Q\) a la línea\(\ell\) es:
\[h =\frac{\norm{\vec{PQ}\times \vec d}}{\norm{d}}.\] - Dejar\(P_1\) ser un punto en línea\(\ell_1\) que es paralelo a\(\vec d_1\), y dejar\(P_2\) ser un punto en línea\(\ell_2\) paralelo a\(\vec d_2\), y dejar\(\vec c = \vec d_1\times \vec d_2\), donde las líneas\(\ell_1\) y no\(\ell_2\) son paralelas. La distancia\(h\) entre las dos líneas es:
\[h=\frac{|\vec{P_1P_2}\cdot \vec c|}{\norm c}.\]
Ejemplo\(\PageIndex{5}\): Finding the distance from a point to a line
Encuentra la distancia desde el punto\(Q=(1,1,3)\) hasta la línea\(\vec\ell(t) = \langle 1,-1,1\rangle+t\langle 2,3,1\rangle.\)
Solución
La ecuación de la línea nos da el punto\(P=(1,-1,1)\) que se encuentra en la línea, de ahí\(\vec{PQ} = \langle 0,2,2\rangle\). La ecuación también da\(\vec d= \langle 2,3,1\rangle\). Siguiendo la Idea Clave 50, tenemos la distancia como
\ [\ begin {align*}
h &=\ frac {\ norm {\ vec {PQ}\ times\ vec d}} {\ norm {d}}\\
&=\ frac {\ norm {\ langle -4,4, -4\ rangle}} {\ sqrt {14}}\\
&=\ frac {4\ sqrt {3}} {\ sqrt {14}}\ aprox 1.852.
\ end {align*}\]
El punto\(Q\) es aproximadamente\(1.852\) unidades de la línea\(\vec\ell(t)\).
Ejemplo\(\PageIndex{6}\): Finding the distance between lines
Encuentra la distancia entre las líneas\[\ell_1: \begin{array}{ccc} x&=&1+3t \\ y&=&2-t\\z&=&t\end{array}\qquad\qquad \ell_2:\begin{array}{ccc} x&=&-2+4s\\y&=&3+s\\z&=&5+2s.\end{array}\]
Solución
Estas son las líneas sames como se da en el Ejemplo 10.5.3, donde mostramos que estaban sesgadas. Las ecuaciones nos permiten identificar los siguientes puntos y vectores:
\[P_1 = (1,2,0)\quad P_2 = (-2,3,5) \quad \Rightarrow \quad \vec{P_1P_2} = \langle -3,1,5\rangle.\]
\[\vec d_1 = \langle 3,-1,1\rangle \quad \vec d_2 = \langle 4,1,2\rangle \quad \Rightarrow \quad \vec c = \vec d_1\times \vec d_2 = \langle -3,-2,7\rangle.\]
Desde Key Idea 50 tenemos la distancia\(h\) entre las dos líneas es
\ [\ begin {alinear*}
h &=\ frac {|\ vec {P_1P_2}\ cdot\ vec c|} {\ norma c}\\
&=\ frac {42} {\ sqrt {62}}\ aprox 5.334.
\ end {alinear*}\]
Las líneas están aproximadamente a 5.334 unidades de distancia.
Uno de los puntos clave a entender desde esta sección es este: para describir una línea, necesitamos un punto y una dirección. Siempre que se plantea un problema con respecto a una línea, uno necesita tomar cualquier información que se ofrezca y obtener información de punto y dirección. Se pueden hacer muchas preguntas (y se hacen en la sección Ejercicio) cuya respuesta inmediatamente se desprende de este entendimiento.
Las líneas son uno de los dos objetos fundamentales de estudio en el espacio. El otro objeto fundamental es el plano, que estudiamos en detalle en la siguiente sección. Muchos objetos tridimensionales complejos se estudian aproximando sus superficies con líneas y planos.