
11.4: Unidad Tangente y Vectores Normales



- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Unidad Tangente Vector
Dada una función de valor vectorial suave⇀r(t), definimos en la Definición 71 que cualquier vector paralelo a⇀r′(t0) es tangente a la gráfica de⇀r(t) att=t0. A menudo es útil considerar solo la dirección⇀r′(t) y no su magnitud. Por lo tanto nos interesa el vector unitario en la dirección de⇀r′(t). Esto lleva a una definición.
Definición11.4.1: Unit Tangent Vector
Dejar⇀r(t) ser una función suave en un intervalo abiertoI. El vector tangente unitario⇀T(t) es
⇀T(t)=1‖⇀r′(t)‖⇀r′(t).
Ejemplo11.4.1: Computing the unit tangent vector
Vamos⇀r(t)=⟨3cost,3sint,4t⟩. Encuentra⇀T(t) y computa⇀T(0) y⇀T(1).
Solución
Aplicamos Definición11.4.1 para encontrar⇀T(t).
\ [\ begin {align*}
\ vecs T (t) &=\ dfrac {1} {\ norm {\ vecs r^\ prime (t)}}\ vecs r^\ prime (t)\\ [4pt]
&=\ dfrac {1} {\ sqrt {\ izquierda (-3\ sin t\ derecha) ^2+\ izquierda (3\ cos t\ derecha) ^2+\ izquierda (3\ cos t\ derecha) ^2+ 4^2}}\ langle -3\ sin t,3\ cos t, 4\ rangle\\ [4pt]
&=\ langle -\ dfrac35\ sin t,\ dfrac35\ cos t,\ dfrac 45\ rangle.
\ end {alinear*}\]
Ahora podemos calcular fácilmente⇀T(0) y⇀T(1):
⇀T(0)=⟨0,35,45⟩⇀T(1)=⟨−35sin1,35cos1,45⟩≈⟨−0.505,0.324,0.8⟩.
Estos se trazan en la Figura11.4.1 con sus puntos iniciales en⇀r(0) y⇀r(1), respectivamente. (Parecen bastante “cortos” ya que solo son de longitud 1.)
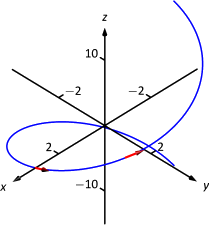
El vector tangente unitario⇀T(t) siempre tiene una magnitud de 1, aunque a veces es fácil dudar de que sea cierto. Podemos ayudar a solidificar este pensamiento en nuestras mentes computando‖⇀T(1)‖:
‖⇀T(1)‖≈√(−0.505)2+0.3242+0.82=1.000001.
Hemos redondeado en nuestro cómputo de⇀T(1), así que no obtenemos 1 exactamente. Dejamos al lector usar la representación exacta de⇀T(1) para verificar que tiene longitud 1.
En muchos sentidos, el ejemplo anterior era “demasiado agradable”. Resultó que siempre⇀r′(t) fue de longitud 5. En el siguiente ejemplo la longitud de⇀r′(t) es variable, dejándonos con una fórmula que no es tan limpia.
Ejemplo11.4.2: Computing the unit tangent vector
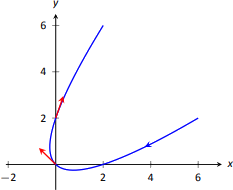
Vamos⇀r(t)=⟨t2−t,t2+t⟩. Encuentra⇀T(t) y computa⇀T(0) y⇀T(1).
Solución
Nos encontramos⇀r′(t)=⟨2t−1,2t+1⟩, y
‖⇀r′(t)‖=√(2t−1)2+(2t+1)2=√8t2+2.
Por lo tanto
⇀T(t)=1√8t2+2⟨2t−1,2t+1⟩=⟨2t−1√8t2+2,2t+1√8t2+2⟩.
Cuandot=0, tenemos⇀T(0)=⟨−1/√2,1/√2⟩; cuandot=1, tenemos⇀T(1)=⟨1/√10,3/√10⟩. Dejamos al lector verificar que cada uno de estos es un vector unitario. Se trazan en la Figura11.4.2.
Unidad Vector Normal
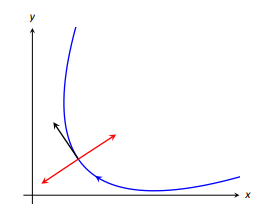
Así como conocer la dirección tangente a un camino es importante, conocer una dirección ortogonal a un camino es importante. Al tratar con funciones de valor real, definimos la línea normal en un punto al ser la línea a través del punto que era perpendicular a la línea tangente en ese punto. Podemos hacer algo similar con funciones vectoriales. Dado⇀r(t) enR2, tenemos 2 direcciones perpendiculares al vector tangente, como se muestra en la Figura11.4.3. Es bueno preguntarse “¿Es preferible una de estas dos direcciones sobre la otra?”
Dado⇀r(t) enR3, hay infinitos vectores ortogonales al vector tangente en un punto dado. Nuevamente, podríamos preguntarnos “¿Es preferible una de estas infinitas opciones sobre las demás? ¿Una de estas es la opción “correcta”?
La respuesta en ambosR2 yR3 es “Sí, hay un vector que no sólo es preferible, es el “correcto” para elegir”. Recordemos el Teorema 93, que establece que si⇀r(t) tiene longitud constante, entonces⇀r(t) es ortogonal a⇀r′(t) para todost. Sabemos⇀T(t), el vector tangente unitario, tiene longitud constante. Por lo tanto⇀T(t) es ortogonal a⇀T′(t).
Veremos que⇀T′(t) es más que una elección conveniente de vector que es ortogonal a⇀r′(t); más bien, es la elección “correcta”. Como lo único que nos importa es la dirección, definimos este vector recién encontrado como un vector unitario.
Nota:⇀T(t) es un vector unitario, por definición. Esto no implica que también⇀T′(t) sea un vector unitario.
Definición11.4.2: Unit Normal Vector
Let⇀r(t) Ser una función de valor vectorial donde el vector tangente unitario,⇀T(t), es suave en un intervalo abiertoI. El vector normal unitario⇀N(t) es
⇀N(t)=1‖⇀T′(t)‖⇀T′(t).
Ejemplo11.4.3: Computing the unit normal vector
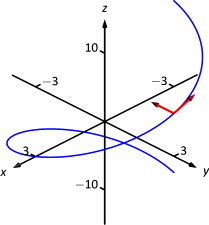
Que⇀r(t)=⟨3cost,3sint,4t⟩ como en el Ejemplo 11.4.1. Croquis ambos⇀T(π/2) y⇀N(π/2) con puntos iniciales en⇀r(π/2).
Solución
En Ejemplo11.4.1, encontramos⇀T(t)=⟨(−3/5)sint,(3/5)cost,4/5⟩. Por lo tanto
⇀T′(t)=⟨−35cost,−35sint,0⟩and‖⇀T′(t)‖=35.
Por lo tanto
⇀N(t)=⇀T′(t)3/5=⟨−cost,−sint,0⟩.
Calculamos⇀T(π/2)=⟨−3/5,0,4/5⟩ y⇀N(π/2)=⟨0,−1,0⟩. Estos están bosquejados en la Figura11.4.4.
El ejemplo anterior fue una vez más “demasiado agradable”. En general, la expresión for⇀T(t) contiene fracciones de raíces cuadradas, de ahí que la expresión de⇀T′(t) sea muy desordenada. Esto lo demostramos en el siguiente ejemplo.
Ejemplo11.4.4: Computing the unit normal vector
Que⇀r(t)=⟨t2−t,t2+t⟩ como en Ejemplo11.4.2. Buscar⇀N(t) y bosquejar⇀r(t) con los vectores tangentes unitarios y normales ent=−1,0 y 1.
Solución
En Ejemplo11.4.2, encontramos
⇀T(t)=⟨2t−1√8t2+2,2t+1√8t2+2⟩.
⇀T′(t)El hallazgo requiere dos aplicaciones de la Regla del Cociente:
\ [\ begin {align*}
T' (t) &=\ langle\ dfrac {\ sqrt {8t^2+2} (2) - (2t-1)\ izquierda (\ dfrac12 (8t^2+2) ^ {-1/2} (16t)\ derecha)} {8t^2+2},\\ [4pt]
y quad\\ dfrac {\ sqrt {8t^2+2} (2) - (2t+1)\ izquierda (\ dfrac12 (8t^2+2) ^ {-1/2} (16t)\ derecha)} {8t^2+2}\ rangle\\ [4pt]
&=\ langle\ dfrac {4 (2 t+1)} {\ izquierda (8 t^2+2\ derecha) ^ {3/2}},\ dfrac {4 (1-2 t)} {\ izquierda (8 t^2+2\ derecha) ^ {3/2}}\ rangle
\ end {alinear*}\]
Esto no es un vector unitario; para encontrar⇀N(t), necesitamos dividir⇀T′(t) por su magnitud.
\ [\ begin {alinear*}
\ norm {\ vecs T\, '(t)} &=\ sqrt {\ dfrac {16 (2t+1) ^2} {(8t^2+2) ^3} +\ dfrac {16 (1-2t) ^2} {(8t^2+2) ^3}}\\ [4pt]
&=\ sqrt {dfrac {16 (8t^2+2)} {(8t^2+2) ^3}}\\ [4pt]
&=\ dfrac {4} {8t^2+2}.
\ end {alinear*}\]
Por último,
\ [\ begin {alinear*}
\ vecs N (t) &=\ dfrac1 {4/ (8t^2+2)}\ langle\ dfrac {4 (2 t+1)} {\ izquierda (8 t^2+2\ derecha) ^ {3/2}},\ dfrac {4
(1-2 t)} {\ izquierda (8 t^2+2\ derecha) ^ {3/2}}\ rangle\\ [4pt]
&=\ langle\ dfrac {2t+1} {\ sqrt {8t^2+2}}, -\ dfrac {2t-1} {\ sqrt {8t^2+2}}\ rangle.
\ end {alinear*}\]
Usando esta fórmula para⇀N(t), calculamos los vectores tangentes unitarios y normales parat=−1,0 y 1 y los bosquejamos en Figura11.4.5.
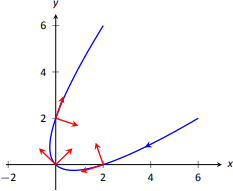
El resultado final para⇀N(t) en Ejemplo11.4.4 es sospechosamente similar a⇀T(t). Hay una razón clara para ello. Si⇀u=⟨u1,u2⟩ es un vector unitario enR2, entonces los únicos vectores unitarios ortogonales a⇀u son⟨−u2,u1⟩ y⟨u2,−u1⟩. Dado⇀T(t), podemos determinar rápidamente⇀N(t) si sabemos por qué término multiplicar(−1).
Consideremos nuevamente la Figura 11.24, donde hemos trazado algunos vectores tangentes unitarios y normales. Observe cómo⇀N(t) siempre apunta “dentro” de la curva, o hacia el lado cóncavo de la curva. Esto no es una coincidencia; esto es cierto en general. Conocer la dirección que⇀r(t) “gira” nos permite encontrar rápidamente⇀N(t).
TEORAMA11.4.1: Unit Normal Vectors in R2
Dejar⇀r(t) ser una función de valor vectorial enR2 donde⇀T′(t) es suave en un intervalo abiertoI. t0Déjate entrarI y⇀T(t0)=⟨t1,t2⟩ Entonces⇀N(t0) es o bien
⇀N(t0)=⟨−t2,t1⟩or⇀N(t0)=⟨t2,−t1⟩,
cualquiera que sea el vector que apunta al lado cóncavo de la gráfica de⇀r.
Aplicación a la aceleración
Dejar⇀r(t) ser una función de posición. Es un hecho (dicho más adelante en Teorema11.4.2) que la aceleración,\ vecs a (t), yace en el plano definido por⇀T y⇀N. Es decir, hay escalaresaT yaN tal que
⇀a(t)=aT⇀T(t)+aN⇀N(t).
El escalaraT mide “cuánta” aceleración hay en la dirección de desplazamiento, es decir, mide el componente de aceleración que afecta la velocidad. El escalaraN mide “cuánta” aceleración es perpendicular a la dirección de desplazamiento, es decir, mide el componente de aceleración que afecta la dirección de desplazamiento.
Podemos encontraraT usando la proyección ortogonal de⇀a(t) onto⇀T(t) (revise la Definición 59 en la Sección 10.3 si es necesario).
Recordando que ya que⇀T(t) es un vector unitario,⇀T(t)⋅⇀T(t)=1, por lo que tenemos
projT(t)⇀a(t)=⇀a(t)⋅⇀T(t)⇀T(t)⋅⇀T(t)⇀T(t)=(⇀a(t)⋅⇀T(t))⏟aT⇀T(t).
Así la cantidad de⇀a(t) en la dirección de⇀T(t) esaT=⇀a(t)⋅⇀T(t). La misma lógica daaN=⇀a(t)⋅⇀N(t).
Si bien esta es una buena forma de computaciónaT, hay formas más simples de encontraraN (ya que encontrarse a⇀N sí mismo puede ser complicado). El siguiente teorema da fórmulas alternativas paraaT yaN.
Nota: Tenga en cuenta que ambosaT yaN son funciones det; es decir, el escalar cambia dependiendo det. Es convención dejar caer la notación(t) ""aT(t) y simplemente escribiraT.
TEORMA11.4.2: Acceleration in the Plane Defined by ⇀T and ⇀N
Dejar⇀r(t) ser una función de posición con aceleración⇀a(t) y unidad tangente y vectores normales⇀T(t) y⇀N(t). Entonces\vecs a (t) yace en el plano definido por\vecs T(t) y\vecs N(t); es decir, existen escalaresa_\text{T} ya_\text{N} tal que
\vecs a (t) = a_\text{T}\vecs T(t) + a_\text{N}\vecs N(t).
Por otra parte,
\ [\ begin {align*}
a_\ text {T} &=\ vecs a (t)\ cdot\ vecs T (t) =\ dfrac {d} {dt}\ left (\ norm {\ vecs v (t)}\ derecha)\\ [4pt]
a_\ text {N} &=\ vecs a (t)\ cdot\ N (t) =\ sqrt {\ norma {\ vecs a (t)} ^2-a_\ texto {T} ^2} =\ dfrac {\ norma {\ vecs a (t)\ veces\ vecs v (t)}} {\ norma {\ vecs v (t)}} =\ norma {\ vecs v (t)}\,\ norma {\ vecs T\, '(t)}
\ final {alinear*}\]
Anote la segunda fórmula paraa_\text{T}: \dfrac{d}{dt}\left(\norm{\vecs v (t)}\right) . Esto mide la tasa de cambio de velocidad, que nuevamente es la cantidad de aceleración en la dirección de desplazamiento.
Ejemplo\PageIndex{5}: Computing a_\text{T} and a_\text{N}
Dejar\vecs r (t) = \langle 3\cos t, 3\sin t, 4t\rangle como en los Ejemplos 11.4.1 y 11.4.3. Encontrara_\text{T} ya_\text{N}.
Solución
Los ejemplos anteriores dan\vecs a (t) = \langle -3\cos t,-3\sin t,0\rangle y
\vecs T(t) = \langle -\dfrac35\sin t,\dfrac35\cos t,\dfrac45\rangle \quad \text{and}\quad \vecs N(t) = \langle -\cos t,-\sin t,0\rangle.
Podemos encontrara_\text{T} ya_\text{N} directamente con productos dot:
\ [\ begin {align*}
a_\ text {T} &=\ vecs a (t)\ cdot\ vecs T (t) =\ dfrac95\ cos t\ sin t-\ dfrac95\ cos t\ sin t+0 = 0.\\ [4pt]
a_\ text {N} &=\ vecs a (t)\ cdot\ vecs N (t) = 3\ cos^2t+3\ sin^2t + 0 = 3.
\ end {alinear*}\]
Así\vecs a (t) = 0\vecs T(t) + 3\vecs N(t) = 3\vecs N(t), que es claramente el caso.
¿Cuál es la interpretación práctica de estos números? a_\text{T}=0significa que el objeto se mueve a una velocidad constante y, por lo tanto, toda aceleración viene en forma de cambio de dirección.
Ejemplo\PageIndex{6}: Computing a_\text{T} and a_\text{N}
Dejar\vecs r (t)=\langle t^2-t,t^2+t\rangle como en Ejemplos\PageIndex{2} y\PageIndex{4}. Encontrara_\text{T} ya_\text{N}.
Solución
Los ejemplos anteriores dan\vecs a(t) = \langle 2,2\rangle y
\vecs T(t) = \langle \dfrac{2t-1}{\sqrt{8t^2+2}},\dfrac{2t+1}{\sqrt{8t^2+2}}\rangle \nonumber
y
\vecs N(t) = \langle \dfrac{2t+1}{\sqrt{8t^2+2}},-\dfrac{2t-1}{\sqrt{8t^2+2}}\rangle. \nonumber
Si bien podemos calculara_\text{N} usando\vecs N(t), en su lugar demostramos usando otra fórmula del Teorema\PageIndex{2}.
\ [\ begin {alinear*}
a_\ texto {T} &=\ vecs a (t)\ cdot\ vecs T (t) =\ dfrac {4t-2} {\ sqrt {8t^2+2}} +\ dfrac {4t+2} {\ sqrt {8t^2+2}} =\ dfrac {8t} {\ sqrt {8t^2} ^2+2}}.\\ [4pt]
a_\ text {N} &=\ sqrt {\ norm {\ vecs a (t)} ^2-a_\ text {T} ^2} =\ sqrt {8-\ left (\ dfrac {8t} {\ sqrt {8t^2+2}}\ derecha) ^2} =\ dfrac {4} {sqrt {8 t^2+2}}
\ end {alinear*}\]
Cuándot=2, a_\text{T} = \dfrac{16}{\sqrt{34}}\approx 2.74 y a_\text{N} = \dfrac{4}{\sqrt{34}} \approx 0.69. Interpretamos esto en el sentido de que ent=2, la partícula se está acelerando principalmente al aumentar la velocidad, no cambiando de dirección. Como el camino cercanot=2 es relativamente recto, esto debería tener sentido intuitivo. La figura\PageIndex{6} da una gráfica de la ruta para referencia.
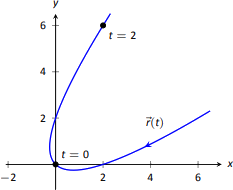
Contraste esto cont=0, dóndea_\text{T} = 0 ya_\text{N} = 4/\sqrt{2}\approx 2.82. Aquí la velocidad de la partícula no está cambiando y toda aceleración es en forma de cambio de dirección.
Ejemplo\PageIndex{7}: Analyzing projectile motion
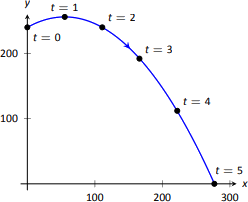
Se lanza una pelota desde una altura de 240ft con una velocidad inicial de 64ft/s y un ángulo de elevación de30^\circ. Encuentra la función\vecs r (t) de posición de la pelota y analizaa_\text{T} ya_\text{N}.
Solución
Usando la Idea Clave 53 de la Sección 11.3 formamos la función de posición de la pelota:
\vecs r (t) = \langle \left(64\cos 30^\circ\right) t, -16t^2+\left(64\sin 30^\circ\right) t+240\rangle,
que trazamos en la Figura\PageIndex{7}.
A partir de esto encontramos\vecs v (t) = \langle 64\cos 30^\circ, -32t+64\sin 30^\circ\rangle y\vecs a (t) = \langle 0,-32\rangle. \vecs T(t)La computación no es difícil, y con alguna simplificación encontramos
\vecs T(t) = \langle \dfrac{\sqrt{3}}{\sqrt{t^2-2t+4}}, \dfrac{1-t}{\sqrt{t^2-2t+4}}\rangle.
Con\vecs a (t) lo simple que es, encontrar tambiéna_\text{T} es simple:
a_\text{T} = \vecs a (t)\cdot \vecs T(t) = \dfrac{32t-32}{\sqrt{t^2-2t+4}}.
Elegimos no encontrar\vecs N(t) y encontrara_\text{N} a través de la fórmulaa_\text{N} = \sqrt{\norm{\vecs a (t)}^2-a_\text{T}^2\,}:
a_\text{N} = \sqrt{32^2-\left(\dfrac{32t-32}{\sqrt{t^2-2t+4}}\right)^2} = \dfrac{32\sqrt{3}}{\sqrt{t^2-2t+4}}.
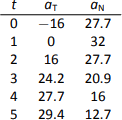
La figura\PageIndex{8} da una tabla de valores dea_\text{T} ya_\text{N}. Cuandot=0, vemos que la velocidad de la pelota disminuye; cuandot=1 la velocidad de la pelota no cambia. Esto corresponde a que ent=1 el balón llega a su punto más alto.
Despuést=1 vemos quea_\text{N} está disminuyendo en valor. Esto se debe a que a medida que cae la pelota, su camino se vuelve más recto y la mayor parte de la aceleración es en forma de acelerar la pelota, y no en cambiar su dirección.
Nuestra comprensión de los vectores tangentes unitarios y normales nos ayuda a entender el movimiento. El trabajo en Ejemplo\PageIndex{7} dio análisis cuantitativo de lo que intuitivamente sabíamos.
En la siguiente sección se dan dos pasos más importantes hacia este análisis. Actualmente describimos la posición solo en términos de tiempo. En la vida cotidiana, sin embargo, a menudo describimos la posición en términos de distancia (“La gasolinera está a unas 2 millas por delante, a la izquierda”). El parámetro de longitud del arco nos permite referir la posición en términos de distancia recorrida.
También sabemos intuitivamente que algunos caminos son más rectos que otros -y algunos son “más curvos” que otros, pero nos falta una medida de “curva”. El parámetro de longitud del arco nos proporciona una forma de calcular la curvatura, una medida cuantitativa de cuán curvilínea es una curva.