
3.1: Definición de la Derivada
- Page ID
- 116679

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Reconocer el significado de la tangente a una curva en un punto.
- Calcular la pendiente de una línea tangente.
- Identificar la derivada como el límite de un cociente de diferencia.
- Calcular la derivada de una función dada en un punto.
- Describir la velocidad como una tasa de cambio.
- Explicar la diferencia entre la velocidad promedio y la velocidad instantánea.
- Estimar la derivada a partir de una tabla de valores.
Ahora que tenemos tanto una comprensión conceptual de un límite como la capacidad práctica de calcular límites, hemos establecido las bases para nuestro estudio del cálculo, la rama de las matemáticas en la que calculamos derivados e integrales. La mayoría de los matemáticos e historiadores coinciden en que el cálculo fue desarrollado independientemente por el inglés Isaac Newton (1643—1727) y el alemán Gottfried Leibniz (1646—1716), cuyas imágenes aparecen en Figura\(\PageIndex{1}\). Cuando acreditamos a Newton y Leibniz con el desarrollo de cálculo, realmente nos estamos refiriendo al hecho de que Newton y Leibniz fueron los primeros en entender la relación entre lo derivado y lo integral. Ambos matemáticos se beneficiaron del trabajo de predecesores, como Barrow, Fermat y Cavalieri. La relación inicial entre los dos matemáticos parece haber sido amistosa; sin embargo, en años posteriores estalló una amarga polémica sobre cuya obra tuvo precedencia. Si bien parece probable que Newton, efectivamente, llegó primero a las ideas detrás del cálculo, estamos en deuda con Leibniz por la notación que comúnmente usamos hoy en día.
Líneas tangentes
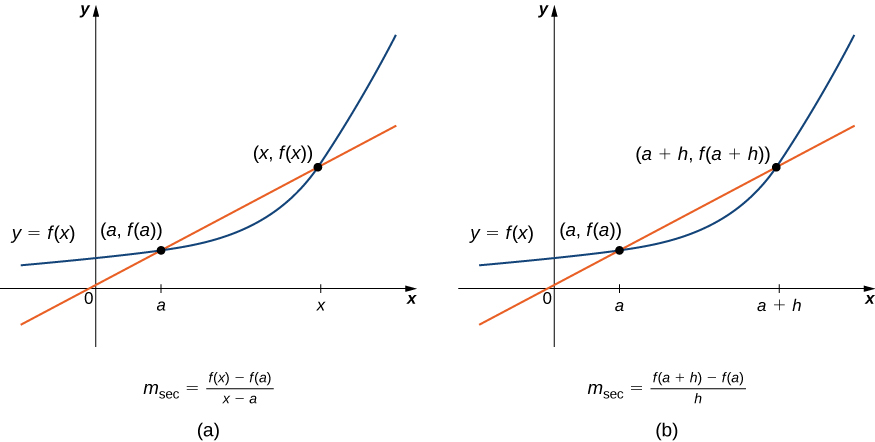
Comenzamos nuestro estudio del cálculo revisando la noción de líneas secantes y líneas tangentes. Recordemos que se utilizó la pendiente de una línea secante a una función en un punto\((a,f(a))\) para estimar la tasa de cambio, o la velocidad a la que una variable cambia en relación con otra variable. Podemos obtener la pendiente de la secante eligiendo un valor de x cerca de a y dibujando una línea a través de los puntos\((a,f(a))\) y\((x,f(x))\), como se muestra en la Figura\(\PageIndex{2}\). La pendiente de esta línea viene dada por una ecuación en forma de cociente de diferencia:
\[m_{sec}=\frac{f(x)−f(a)}{x−a} \nonumber \]
También podemos calcular la pendiente de una línea secante a una función en un valor a mediante el uso de esta ecuación y reemplazando\(x\) con\(a+h\), donde\(h\) es un valor cercano a a. entonces podemos calcular la pendiente de la línea a través de los puntos\((a,f(a))\) y\((a+h,f(a+h))\). En este caso, encontramos que la línea secante tiene una pendiente dada por el siguiente cociente de diferencia con incremento\(h\):
\[m_{sec}=\frac{f(a+h)−f(a)}{a+h−a}=\frac{f(a+h)−f(a)}{h} \nonumber \]
Let\(f\) Ser una función definida en un intervalo\(I\) que contiene\(a\). Si\(x≠a\) está en\(I\), entonces
\[Q=\frac{f(x)−f(a)}{x−a} \nonumber \]
es un cociente de diferencia.
Además, si\(h≠0\) se elige para que\(a+h\) esté en\(I\), entonces
\[Q=\frac{f(a+h)−f(a)}{h} \nonumber \]
es un cociente de diferencia con incremento\(h\).
Estas dos expresiones para calcular la pendiente de una línea secante se ilustran en la Figura\(\PageIndex{2}\). Veremos que cada uno de estos dos métodos para encontrar la pendiente de una línea secante es de valor. Dependiendo de la configuración, podemos elegir uno u otro. La consideración principal en nuestra elección suele depender de la facilidad de cálculo.
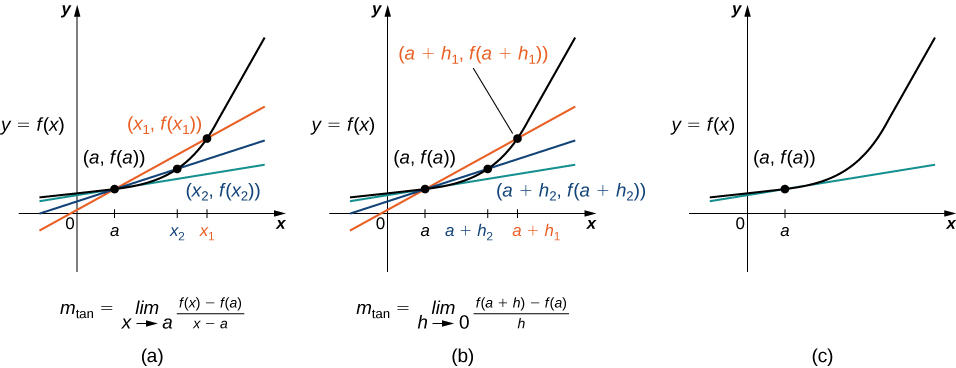
En la Figura\(\PageIndex{3a}\) vemos que, como los valores de\(x\) aproximación\(a\), las pendientes de las líneas secantes proporcionan mejores estimaciones de la tasa de cambio de la función at\(a\). Además, las propias líneas secantes se acercan a la línea tangente a la función at\(a\), que representa el límite de las líneas secantes. De igual manera, Figura\(\PageIndex{3b}\) muestra que a medida que se\(h\) acercan los valores de\(0\), las líneas secantes también se acercan a la línea tangente. La pendiente de la línea tangente a\(a\) es la velocidad de cambio de la función at\(a\), como se muestra en la Figura\(\PageIndex{3c}\).
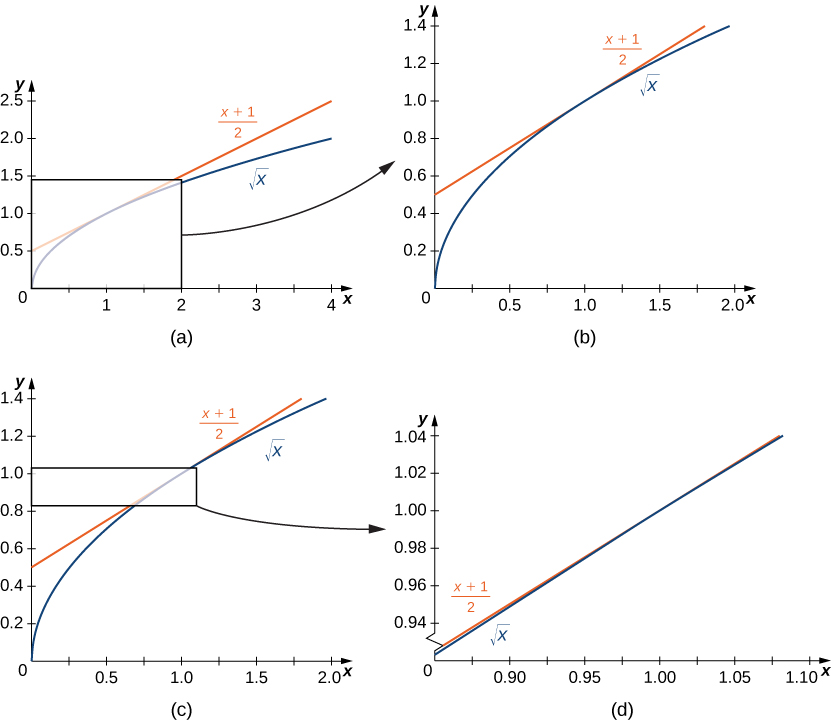
En la Figura\(\PageIndex{4}\) se muestra la gráfica de\(f(x)=\sqrt{x}\) y su línea tangente\((1,1)\) en una serie de intervalos más apretados alrededor\(x=1\). A medida que los intervalos se hacen más estrechos, la gráfica de la función y su línea tangente parecen coincidir, haciendo que los valores en la línea tangente sean una buena aproximación a los valores de la función para elecciones\(x\) cercanas a\(1\). De hecho, la gráfica de\(f(x)\) sí misma parece ser localmente lineal en las inmediaciones de\(x=1\).
Formalmente podemos definir la línea tangente a la gráfica de una función de la siguiente manera.
Let\(f(x)\) Ser una función definida en un intervalo abierto conteniendo\(a\). La línea tangente a\(f(x)\) at\(a\) es la línea que pasa por el punto\((a,f(a))\) que tiene pendiente
\[m_{tan}=\lim_{x→a}\frac{f(x)−f(a)}{x−a} \label{tanline1} \]
siempre y cuando este límite exista.
Equivalentemente, podemos definir la línea tangente a\(f(x)\) at\(a\) para ser la línea que pasa por el punto\((a,f(a))\) que tiene pendiente
\[m_{tan}=\lim_{h→0}\frac{f(a+h)−f(a)}{h} \label{tanline2} \]
siempre y cuando este límite exista.
Así como hemos utilizado dos expresiones diferentes para definir la pendiente de una línea secante, utilizamos dos formas diferentes para definir la pendiente de la línea tangente. En este texto utilizamos ambas formas de la definición. Como antes, la elección de la definición dependerá de la configuración. Ahora que hemos definido formalmente una línea tangente a una función en un punto, podemos usar esta definición para encontrar ecuaciones de líneas tangentes.
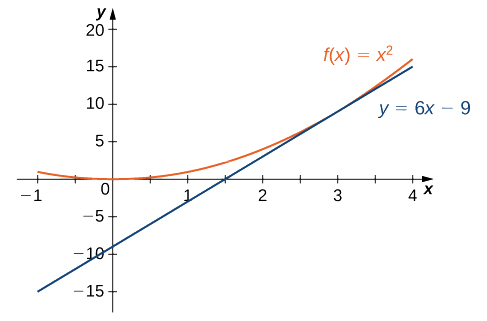
Encuentra la ecuación de la línea tangente a la gráfica de\(f(x)=x^2\) at\(x=3.\)
Solución
Primero encuentra la pendiente de la línea tangente. En este ejemplo, utilice la ecuación\ ref {tanline1}.
\ (\ displaystyle\ begin {align*} m_ {tan} &=\ lim_ {x→3}\ frac {f (x) −f (3)} {x−3} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {x→3}\ frac {x^2−9} {x−3} &\ text {Sustituto} f (x) =x^2\ texto {y} f (3) =9\\ [4pt]
&=\ lim_ {x→3}\ frac {(x−3) (x+3)} {x−3} =\ lim_ {x→3} (x+3) =6 & ; &\ text {Factorice el numerador para evaluar el límite.} \ end {alinear*}\)
A continuación, encuentra un punto en la línea tangente. Dado que la línea es tangente a la gráfica de\(f(x)\) at\(x=3\), pasa por el punto\((3,f(3))\). Tenemos\(f(3)=9\), por lo que la línea tangente pasa por el punto\((3,9)\).
Usando la ecuación punto-pendiente de la línea con la pendiente\(m=6\) y el punto\((3,9)\), obtenemos la línea\(y−9=6(x−3)\). Simplificando, tenemos\(y=6x−9\). La gráfica\(f(x)=x^2\) y su línea tangente en\(3\) se muestran en la Figura\(\PageIndex{5}\).
Utilice la ecuación\ ref {tanline2} para encontrar la pendiente de la línea tangente a la gráfica de\(f(x)=x^2\) at\(x=3\).
Solución
Los pasos son muy similares a Ejemplo\(\PageIndex{1}\). Ver Ecuación\ ref {tanline2} para la definición.
\ (\ begin {align*} m_ {tan} &=\ lim_ {h→0}\ frac {f (3+h) −f (3)} {h} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {h→0}\ frac {(3+h) ^2−9} {h} &\ text {Sustituir} f (3+h) ^2−9} {h} &\ text {Sustituir} f (3+h)) =( 3+h) ^2\ text {y} f (3) =9\\ [4pt]
&=\ lim_ {h→0}\ frac {9+6h+h^2−9} {h} &\ text {Expandir y simplificar para evaluar el límite.}\\ [4pt]
&=\ lim_ {h→0}\ frac {h (6+h)} {h} =\ lim_ {h→0} (6+h) =6\ end {align*}\)
Obtuvimos el mismo valor para la pendiente de la línea tangente usando la otra definición, demostrando que las fórmulas pueden intercambiarse.
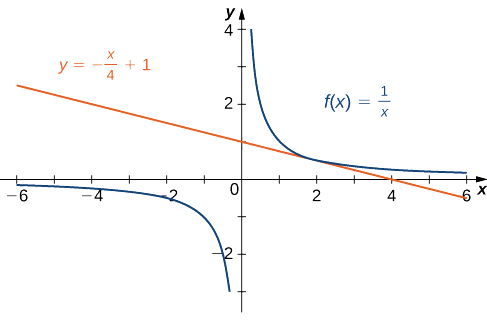
Encuentra la ecuación de la línea tangente a la gráfica de\(f(x)=1/x\) at\(x=2\).
Solución
Podemos usar la Ecuación\ ref {tanline1}, pero como hemos visto, los resultados son los mismos si usamos la Ecuación\ ref {tanline2}.
\ (\ displaystyle\ begin {align*} m_ {tan} &=\ lim_ {x→2}\ frac {f (x) −f (2)} {x−2} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {x→2}\ frac {\ frac {1} {x} −\ frac {1} {2}} {x−2} &\ text {Sustituir} f (x) =\ frac {1} {x}\ texto {y} f (2) =\ frac {1} {2}\\ [4pt]
&=\ lim_ {x→2}\ frac {\ frac {1} {x} −\ frac {1} {2}} {x−2} ⋅\ frac {2x} {2x} &\ text {Multiplicar numerador y denominador por} 2x\ text {para simplificar fracciones.}\\ [4pt]
&=\ lim_ {x→2}\ frac {(2−x)} {(x−2) (2x)} &\ text {Simplificar.}\\ [4pt]
&=\ lim_ {x→2}\ frac {−1} {2x} &\ text {Simplificar usando}\ frac {2−x} {x−2} =−1,\ text {for} x≠ 2.\\ [4pt]
&=−\ frac {1} {4} &\ text {Evalúa el límite.} \ end {alinear*}\)
Ahora sabemos que la pendiente de la línea tangente es\(−\frac{1}{4}\). Para encontrar la ecuación de la línea tangente, también necesitamos un punto en la línea. Eso lo sabemos\(f(2)=\frac{1}{2}\). Dado que la línea tangente pasa por el punto\((2,\frac{1}{2})\) podemos usar la ecuación de punto-pendiente de una línea para encontrar la ecuación de la línea tangente. Así la línea tangente tiene la ecuación\(y=−\frac{1}{4}x+1\). Las gráficas de\(f(x)=\frac{1}{x}\) y\(y=−\frac{1}{4}x+1\) se muestran en la Figura\(\PageIndex{6}\).
Encuentra la pendiente de la línea tangente a la gráfica de\(f(x)=\sqrt{x}\) at\(x=4\).
- Pista
-
Utilice la Ecuación\ ref {tanline1} o la Ecuación\ ref {tanline2}. Multiplica el numerador y el denominador por un conjugado.
- Contestar
-
\(\frac{1}{4}\)
La derivada de una función en un punto
El tipo de límite que calculamos para encontrar la pendiente de la línea tangente a una función en un punto ocurre en muchas aplicaciones en muchas disciplinas. Estas aplicaciones incluyen velocidad y aceleración en física, funciones de beneficio marginal en los negocios y tasas de crecimiento en biología. Este límite ocurre con tanta frecuencia que le damos a este valor un nombre especial: el derivado. El proceso de encontrar una derivada se llama diferenciación.
Let\(f(x)\) Ser una función definida en un intervalo abierto conteniendo\(a\). La derivada de la función\(f(x)\) at\(a\), denotada por\(f′(a)\), se define por
\[f′(a)=\lim_{x→a}\frac{f(x)−f(a)}{x−a} \label{der1} \]
siempre y cuando este límite exista.
Alternativamente, también podemos definir la derivada de\(f(x)\) at\(a\) como
\[f′(a)=\lim_{h→0}\frac{f(a+h)−f(a)}{h}. \label{der2} \]
Para\(f(x)=x^2\), use una tabla para estimar\(f′(3)\) usando la Ecuación\ ref {der1}.
Solución
Crea una tabla usando valores de\(x\) justo debajo\(3\) y justo arriba\(3\).
| \(x\) | \(\dfrac{x^2−9}{x−3}\) |
|---|---|
| \ (x\)” style="text-align:center; ">2.9 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">5.9 |
| \ (x\)” style="text-align:center; ">2.99 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">5.99 |
| \ (x\)” style="text-align:center; ">2.999 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">5.999 |
| \ (x\)” style="text-align:center; ">3.001 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">6.001 |
| \ (x\)” style="text-align:center; ">3.01 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">6.01 |
| \ (x\)” style="text-align:center; ">3.1 | \ (\ dfrac {x^2−9} {x−3}\)” style="text-align:center; ">6.1 |
Después de examinar la tabla, vemos que una buena estimación es\(f′(3)=6\).
Para\(f(x)=x^2\), use una tabla para estimar\(f′(3)\) usando la Ecuación\ ref {der2}.
- Pista
-
Evaluar\(\dfrac{(x+h)^2−x^2}{h}\) en\(h=−0.1,\,−0.01,\,−0.001,\,0.001,\,0.01,\,0.1\)
- Contestar
-
6
Para\(f(x)=3x^2−4x+1\), encontrar\(f′(2)\) usando la ecuación\ ref {der1}.
Solución
Sustituir la función y el valor dados directamente en la ecuación.
\ (\ displaystyle\ begin {align*} f′ (x) &=\ lim_ {x→2}\ frac {f (x) −f (2)} {x−2} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {x→2}\ frac {(3x^2−4x+1) −5} {x−2} &\ text {Sustituto} f (x) =3x^2−4x+1\ texto {y} f (2) =5.\\ [4pt]
&=\ lim_ {x→2}\ frac {(x−2) (3x+2)} {x−2} & & amp;\ text {Simplifica y factoriza el numerador.}\\ [4pt]
&=\ lim_ {x→2} (3x+2) &\ text {Cancelar el factor común.}\\ [4pt]
&=8 & &\ text {Evalúa el límite.} \ end {alinear*}\)
Para\(f(x)=3x^2−4x+1\), encontrar\(f′(2)\) usando la ecuación\ ref {der2}.
Solución
Usando esta ecuación, podemos sustituir dos valores de la función en la ecuación, y deberíamos obtener el mismo valor que en Ejemplo\(\PageIndex{6}\).
\ (\ displaystyle\ begin {align*} f′ (2) &=\ lim_ {h→0}\ frac {f (2+h) −f (2)} {h} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {h→0}\ frac {(3 (2+h) ^2−4 (2+h) +1) −5} h} & &\ text {Sustituir} f (2) =5\ texto {y} f (2+h) =3 (2+h) ^2−4 (2+h) +1.\\ [4pt]
&=\ lim_ {h→0}\ frac {3 (4+4h+h^2) -8-4h+1-5} {h} & &\ text {Expandir el numerador.}\\ [4pt]
&=\ lim_ {h→0}\ frac {12+12h+3h^2-12-4h} {h} &\ text {Distribuye y empieza a simplificar el numerador.}\\ [4pt]
&=\ lim_ {h→0}\ frac {3h^2+8h} {h} & &\ text {Termina de simplificar el numerador.}\\ [4pt]
&=\ lim_ {h→0}\ frac {h (3h+8)} {h} & &\ text {Factorizar el numerador.}\\ [4pt]
&=\ lim_ {h→0} (3h+8) &\ text {Cancelar el factor común.}\\ [4pt]
&=8 & &\ text {Evaluar el límite.} \ end {alinear*}\)
Los resultados son los mismos ya sea que usemos la Ecuación\ ref {der1} o la Ecuación\ ref {der2}.
Para\(f(x)=x^2+3x+2\), encontrar\(f′(1)\).
- Pista
-
Usa la Ecuación\ ref {der1}, la Ecuación\ ref {der2}, o prueba ambas.
- Contestar
-
\(f′(1)=5\)
Velocidades y Tasas de Cambio
Ahora que podemos evaluar una derivada, podemos usarla en aplicaciones de velocidad. Recordemos que si la posición de un objeto\(s(t)\) se mueve a lo largo de un eje de coordenadas, la velocidad promedio del objeto durante un intervalo de tiempo\([a,t]\) si\(t>a\) o\([t,a]\) si\(t<a\) viene dada por el cociente de diferencia
\[v_{ave}=\frac{s(t)−s(a)}{t−a}. \label{avgvel} \]
Como los valores de\(t\) aproximación\(a\), los valores de\(v_{ave}\) aproximación al valor que llamamos la velocidad instantánea a\(a\). Es decir, la velocidad instantánea a\(a\), denotada\(v(a)\), viene dada por
\[v(a)=s′(a)=\lim_{t→a}\frac{s(t)−s(a)}{t−a}. \label{instvel} \]
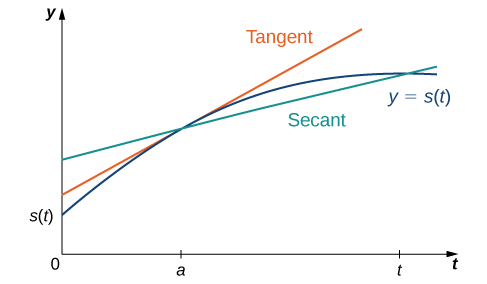
Para comprender mejor la relación entre la velocidad media y la velocidad instantánea, ver Figura\(\PageIndex{7}\). En esta figura, la pendiente de la línea tangente (mostrada en rojo) es la velocidad instantánea del objeto en el momento\(t=a\) cuya posición en el tiempo\(t\) viene dada por la función\(s(t)\). La pendiente de la línea secante (mostrada en verde) es la velocidad promedio del objeto a lo largo del intervalo de tiempo\([a,t]\).
Podemos usar la ecuación\ ref {instvel} para calcular la velocidad instantánea, o podemos estimar la velocidad de un objeto en movimiento usando una tabla de valores. Entonces podemos confirmar la estimación usando la Ecuación\ ref {avgvel}.
Un peso de plomo en un resorte oscila hacia arriba y hacia abajo. Su posición en el tiempo\(t\) con respecto a una línea horizontal fija viene dada por\(s(t)=\sin t\) (Figura\(\PageIndex{8}\)). Utilice una tabla de valores para estimar\(v(0)\). Verifique la estimación usando la ecuación\ ref {instvel}.
Solución
Podemos estimar la velocidad instantánea a\(t=0\) calculando una tabla de velocidades promedio usando valores de\(t\) aproximación\(0\), como se muestra en la Tabla\(\PageIndex{2}\).
| \(t\) | \(\frac{\sin t−\sin 0}{t−0}=\frac{\sin t}{t}\) |
|---|---|
| \ (t\)” style="text-align:center; ">−0.1 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.998334166 |
| \ (t\)” style="text-align:center; ">−0.01 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.9999833333 |
| \ (t\)” style="text-align:center; ">−0.001 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.999999833 |
| \ (t\)” style="text-align:center; ">0.001 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.999999833 |
| \ (t\)” style="text-align:center; ">0.01 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.9999833333 |
| \ (t\)” style="text-align:center; ">0.1 | \ (\ frac {\ sin t−\ sin 0} {t−0} =\ frac {\ sin t} {t}\)” style="text-align:center; ">0.998334166 |
De la tabla vemos que la velocidad promedio a lo largo del intervalo de tiempo\([−0.1,0]\) es\(0.998334166\), la velocidad promedio sobre el intervalo de tiempo\([−0.01,0]\) es\(0.9999833333\), y así sucesivamente. Usando esta tabla de valores, parece que una buena estimación es\(v(0)=1\).
Al usar la ecuación\ ref {instvel}, podemos ver que
\[v(0)=s′(0)=\lim_{t→0}\frac{\sin t−\sin 0}{t−0}=\lim_{t→0}\frac{\sin t}{t}=1. \nonumber \]
Así, de hecho,\(v(0)=1\).
Se cae una roca desde una altura de\(64\) pies. Su altura sobre el suelo en el tiempo\(t\) segundos después viene dada por\(s(t)=−16t^2+64,\;0≤t≤2\). Encuentra su velocidad instantánea en\(1\) segundo lugar después de que se cae, usando la ecuación\ ref {instvel}.
- Pista
-
\(v(t)=s′(t)\). Siga los ejemplos anteriores de la derivada usando la ecuación\ ref {instvel}.
- Contestar
-
−32 pies/s
Como hemos visto a lo largo de esta sección, la pendiente de una línea tangente a una función y la velocidad instantánea son conceptos relacionados. Cada uno se calcula calculando una derivada y cada uno mide la tasa instantánea de cambio de una función, o la tasa de cambio de una función en cualquier punto a lo largo de la función.
La tasa instantánea de cambio de una función\(f(x)\) a un valor\(a\) es su derivada\(f′(a)\).
Alcanzando una velocidad máxima de\(270.49\) mph, el Hennessey Venom GT es uno de los autos más rápidos del mundo. En las pruebas pasó de\(0\) a\(60\) mph en\(3.05\) segundos, de\(0\) a\(100\) mph en\(5.88\) segundos, de\(0\) a\(200\) mph en\(14.51\) segundos, y de\(0\) a\(229.9\) mph en\(19.96\) segundos. Utilice estos datos para sacar una conclusión sobre la tasa de cambio de velocidad (es decir, su aceleración) a medida que se acerca\(229.9\) a mph. ¿La velocidad a la que se acelera el automóvil parece estar aumentando, disminuyendo o constante?

Solución: Primero observe que\(60\) mph =\(88\) ft/s,\(100\) mph ≈\(146.67\) ft/s,\(200\) mph ≈\(293.33\) ft/s y\(229.9\) mph ≈\(337.19\) ft/s Podemos resumir la información en una tabla.
| \(t\) | \(v(t)\) |
|---|---|
| \ (t\) ">0 | \ (v (t)\) ">0 |
| \ (t\) ">3.05 | \ (v (t)\) ">88 |
| \ (t\) ">5.88 | \ (v (t)\) ">147.67 |
| \ (t\) ">14.51 | \ (v (t)\) ">293.33 |
| \ (t\) ">19.96 | \ (v (t)\) ">337.19 |
Ahora calcule la aceleración promedio del automóvil en pies por segundo en intervalos de la forma a\([t,19.96]\) medida que se\(t\) aproxime\(19.96\), como se muestra en la siguiente tabla.
| \(t\) | \(\dfrac{v(t)−v(19.96)}{t−19.96}=\dfrac{v(t)−337.19}{t−19.96}\) |
|---|---|
| \ (t\) ">0.0 | \ (\ dfrac {v (t) −v (19.96)} {t−19.96} =\ dfrac {v (t) −337.19} {t−19.96}\) ">16.89 |
| \ (t\) ">3.05 | \ (\ dfrac {v (t) −v (19.96)} {t−19.96} =\ dfrac {v (t) −337.19} {t−19.96}\) ">14.74 |
| \ (t\) ">5.88 | \ (\ dfrac {v (t) −v (19.96)} {t−19.96} =\ dfrac {v (t) −337.19} {t−19.96}\) ">13.46 |
| \ (t\) ">14.51 | \ (\ dfrac {v (t) −v (19.96)} {t−19.96} =\ dfrac {v (t) −337.19} {t−19.96}\) ">8.05 |
La velocidad a la que el automóvil está acelerando disminuye a medida que su velocidad se acerca\(229.9\) a mph (\(337.19\)pies/s).
Un propietario pone el termostato para que la temperatura en la casa comience a bajar a partir de\(9\) las\(70°F\) p.m., alcance un mínimo de\(60°\) durante la noche, y vuelva a subir a\(70°\) por la\(7\) mañana de la mañana siguiente. Supongamos que la temperatura en la casa viene dada por\(T(t)=0.4t^2−4t+70\) for\(0≤t≤10\), donde\(t\) esta el numero de horas pasadas\(9\) pm Encuentra la tasa instantanea de cambio de la temperatura a medianoche.
Solución
Ya que la medianoche es\(3\)\(9\) horas pasadas la tarde, queremos computar\(T′(3)\). Consulte la Ecuación\ ref {der1}.
\ (\ displaystyle\ begin {align*} T′ (3) &=\ lim_ {t→3}\ frac {T (t) −T (3)} {t−3} &\ text {Aplica la definición.}\\ [4pt]
&=\ lim_ {t→3}\ frac {0.4t^2−4t+70−61.6} {t−3} & &\ text {Sustituto} T (t) =0.4t^2−4t+70\ text {y} T (3) =61.6.\\ [4pt]
&=\ lim_ {t→3}\ frac {0.4t^2−4t+8.4} {t− 3} & &\ text {Simplificar.}\\ [4pt]
&=\ lim_ {t→3}\ frac {0.4 (t−3) (t−7)} {t−3}\\ [4pt]
&=\ lim_ {t→3} 0.4 (t−7) &\ text {Cancelar.}\\ [4pt]
&=−1.6 & &\ text {Evaluar el límite.} \ end {alinear*}\)
La tasa instantánea de cambio de la temperatura a la medianoche es\(−1.6°F\) por hora.
Una empresa de juguetes puede vender sistemas\(x\) electrónicos de juego a un precio de\(p=−0.01x+400\) dólares por sistema de juego. El costo de los\(x\) sistemas de fabricación viene dado por\(C(x)=100x+10,000\) dólares. Encuentra la tasa de cambio de ganancia cuando se producen\(10,000\) juegos. ¿Debería la compañía de juguetes aumentar o disminuir la producción?
Solución
El beneficio\(P(x)\) obtenido por la producción de sistemas de\(x\) juego es\(R(x)−C(x)\), donde\(R(x)\) se encuentran los ingresos obtenidos de la venta de\(x\) juegos. Dado que la compañía puede vender\(x\) juegos\(p=−0.01x+400\) por juego,
\(R(x)=xp=x(−0.01x+400)=−0.01x^2+400x\).
En consecuencia,
\(P(x)=−0.01x^2+300x−10,000\).
Por lo tanto, evaluar la tasa de cambio de ganancia da
\ (\ displaystyle\ begin {alinear*} P′ (10000) &=\ lim_ {x→10000}\ frac {P (x) −P (10000)} {x−10000}\\ [4pt]
&=\ lim_ {x→10000}\ frac {−0.01x^2+300x−10000−1990000} {x−10000}\\ [4pt]
&=\ lim_ {x→10000}\ frac {−0.01x^2+300x−2000000} {x−10000}\\ [4pt]
&=100\ end {align*}\).
Dado que la tasa de cambio de ganancia\(P′(10,000)>0\) y\(P(10,000)>0\), la empresa debe incrementar la producción.
Una cafetería determina que la ganancia diaria en bollos obtenidos al cobrar s dólares por bollo es\(P(s)=−20s^2+150s−10\). Actualmente la cafetería cobra\($3.25\) por bollo. Encontrar\(P′(3.25)\), la tasa de cambio de ganancia cuando el precio es\($3.25\) y decidir si la cafetería debe o no considerar subir o bajar sus precios en bollos.
- Pista
-
Use Ejemplo\(\PageIndex{11}\) para una guía.
- Contestar
-
\(P′(3.25)=20>0\); subir los precios
Conceptos clave
- La pendiente de la línea tangente a una curva mide la tasa instantánea de cambio de una curva. Podemos calcularlo encontrando el límite del cociente de diferencia o el cociente de diferencia con incremento\(h\).
- La derivada de una función\(f(x)\) en un valor\(a\) se encuentra usando cualquiera de las definiciones para la pendiente de la línea tangente.
- La velocidad es la tasa de cambio de posición. Como tal, la velocidad\(v(t)\) en el tiempo\(t\) es la derivada de la posición\(s(t)\) en el tiempo\(t\).
La velocidad promedio viene dada por La velocidad\[v_{ave}=\dfrac{s(t)−s(a)}{t−a}. \nonumber \] instantánea viene dada por\[\displaystyle v(a)=s′(a)=\lim_{t→a}\frac{s(t)−s(a)}{t−a}. \nonumber \] - Podemos estimar una derivada usando una tabla de valores.
Ecuaciones Clave
- Cociente de diferencia
\(Q=\dfrac{f(x)−f(a)}{x−a}\)
- Cociente de diferencia con incremento h
\(Q=\dfrac{f(a+h)−f(a)}{a+h−a}=\dfrac{f(a+h)−f(a)}{h}\)
- Pendiente de línea tangente
\(\displaystyle m_{tan}=\lim_{x→a}\frac{f(x)−f(a)}{x−a}\)
\(\displaystyle m_{tan}=\lim_{h→0}\frac{f(a+h)−f(a)}{h}\)
- Derivada de f (x) en a
\(\displaystyle f′(a)=\lim_{x→a}\frac{f(x)−f(a)}{x−a}\)
\(\displaystyle f′(a)=\lim_{h→0}\frac{f(a+h)−f(a)}{h}\)
- Velocidad media
\(v_{ave}=\dfrac{s(t)−s(a)}{t−a}\)
- Velocidad instantánea
\(\displaystyle v(a)=s′(a)=\lim_{t→a}\frac{s(t)−s(a)}{t−a}\)
Glosario
- derivado
- la pendiente de la línea tangente a una función en un punto, calculada tomando el límite del cociente de diferencia, es la derivada
- cociente de diferencia
-
de una función\(f(x)\) en\(a\) viene dada por
\(\dfrac{f(a+h)−f(a)}{h}\)o\(\dfrac{f(x)−f(a)}{x−a}\)
- diferenciación
- el proceso de tomar un derivado
- tasa instantánea de cambio
- la tasa de cambio de una función en cualquier punto a lo largo de la función\(a\), también llamada\(f′(a)\), o la derivada de la función en\(a\)